
一种分布式驱动电动汽车多模式电子差速控制系统.pdf

论文****酱吖


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种分布式驱动电动汽车多模式电子差速控制系统.pdf
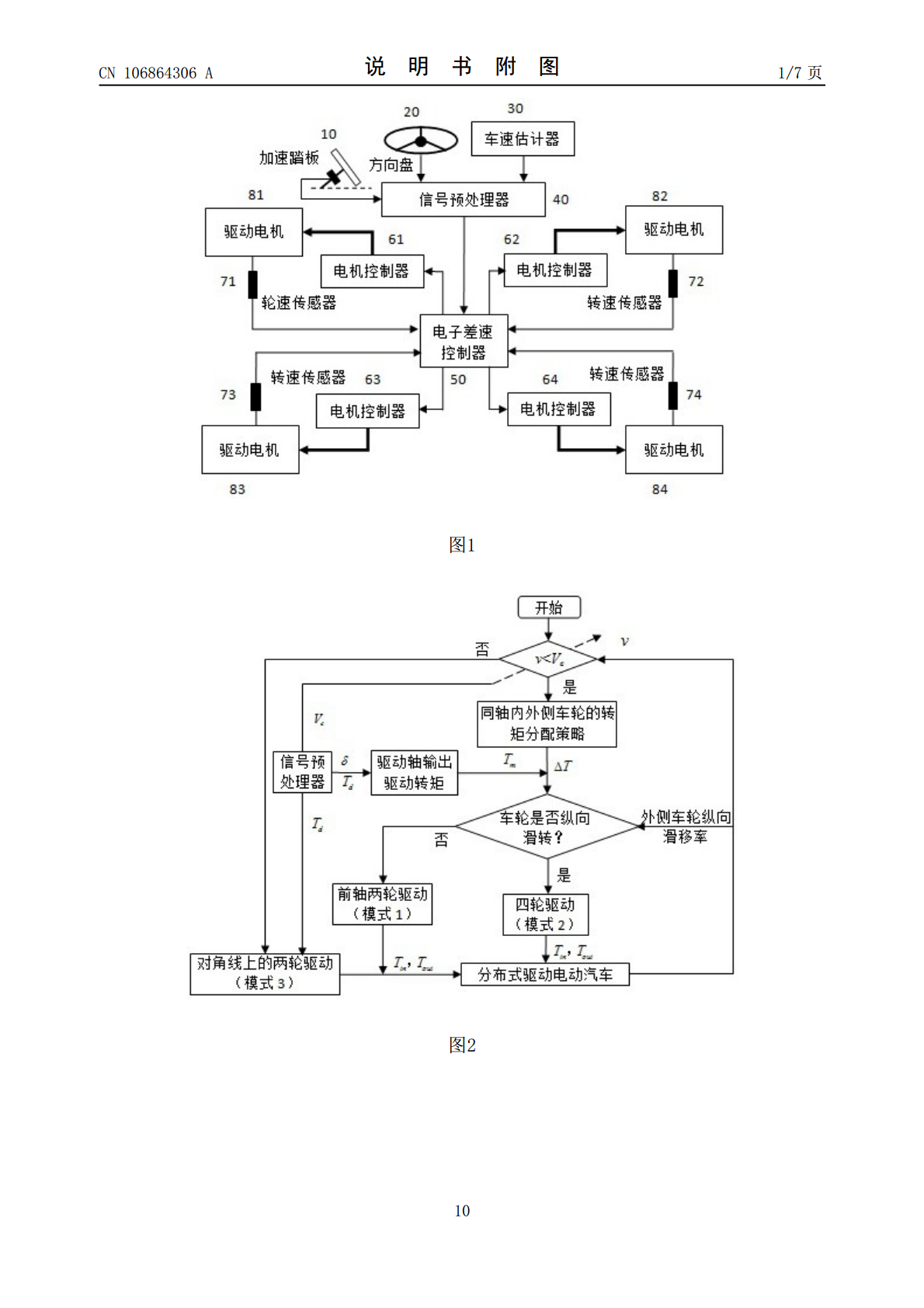
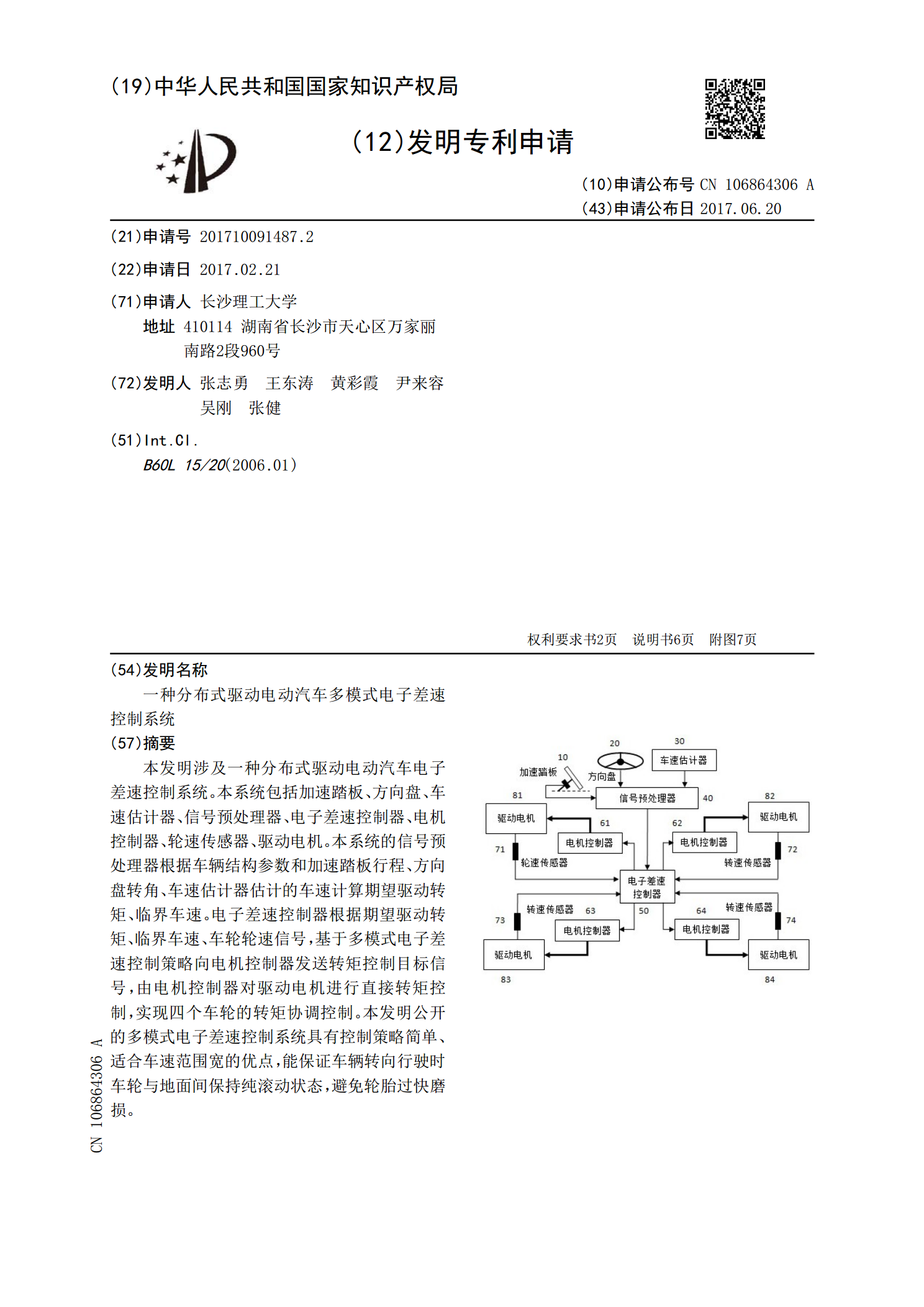
本发明涉及一种分布式驱动电动汽车电子差速控制系统。本系统包括加速踏板、方向盘、车速估计器、信号预处理器、电子差速控制器、电机控制器、轮速传感器、驱动电机。本系统的信号预处理器根据车辆结构参数和加速踏板行程、方向盘转角、车速估计器估计的车速计算期望驱动转矩、临界车速。电子差速控制器根据期望驱动转矩、临界车速、车轮轮速信号,基于多模式电子差速控制策略向电机控制器发送转矩控制目标信号,由电机控制器对驱动电机进行直接转矩控制,实现四个车轮的转矩协调控制。本发明公开的多模式电子差速控制系统具有控制策略简单、适合车速
电动汽车分布式驱动电子差速控制系统及方法.pdf
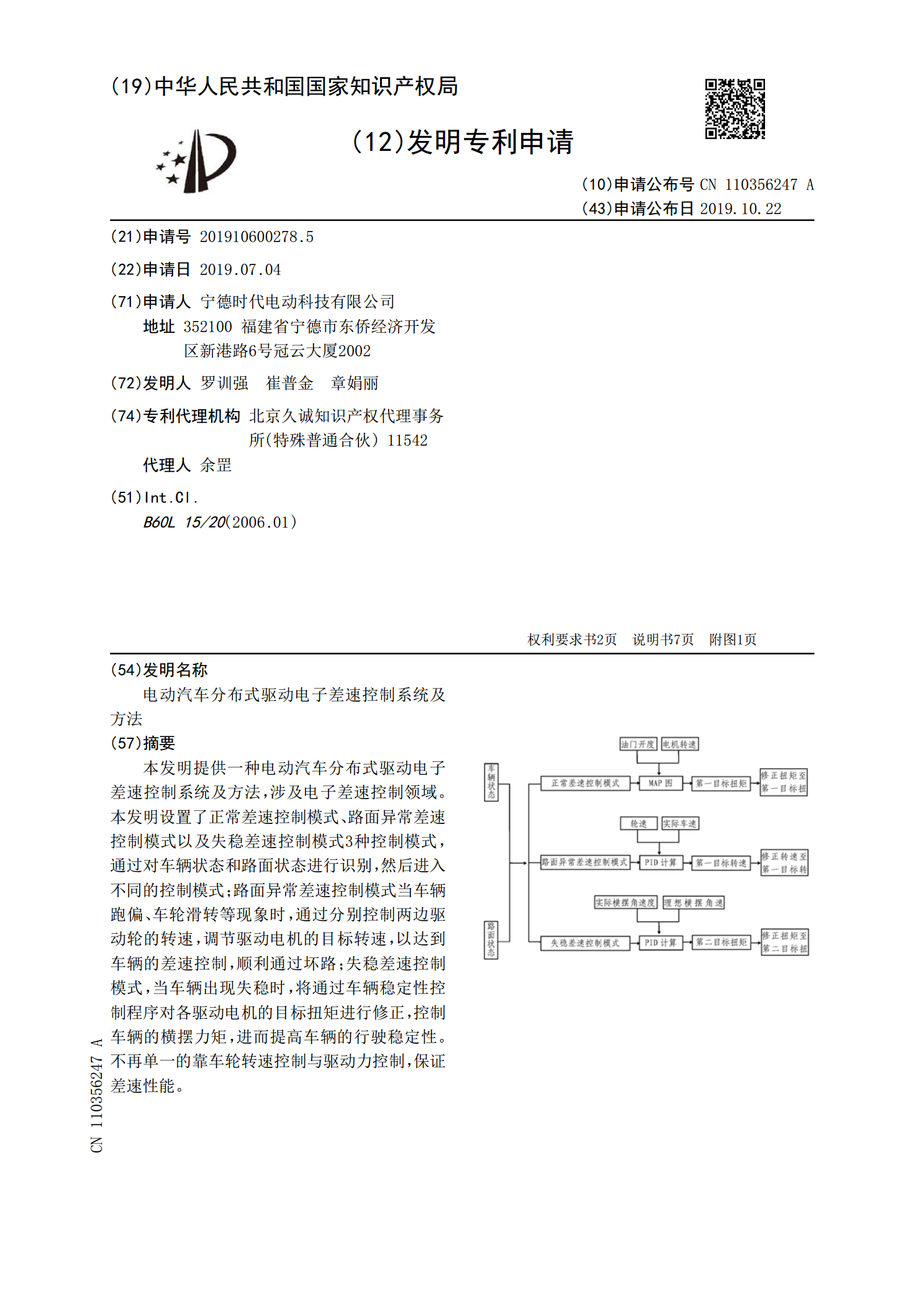
本发明提供一种电动汽车分布式驱动电子差速控制系统及方法,涉及电子差速控制领域。本发明设置了正常差速控制模式、路面异常差速控制模式以及失稳差速控制模式3种控制模式,通过对车辆状态和路面状态进行识别,然后进入不同的控制模式;路面异常差速控制模式当车辆跑偏、车轮滑转等现象时,通过分别控制两边驱动轮的转速,调节驱动电机的目标转速,以达到车辆的差速控制,顺利通过坏路;失稳差速控制模式,当车辆出现失稳时,将通过车辆稳定性控制程序对各驱动电机的目标扭矩进行修正,控制车辆的横摆力矩,进而提高车辆的行驶稳定性。不再单一的靠
轮毂驱动电动汽车的电子差速控制系统.pdf
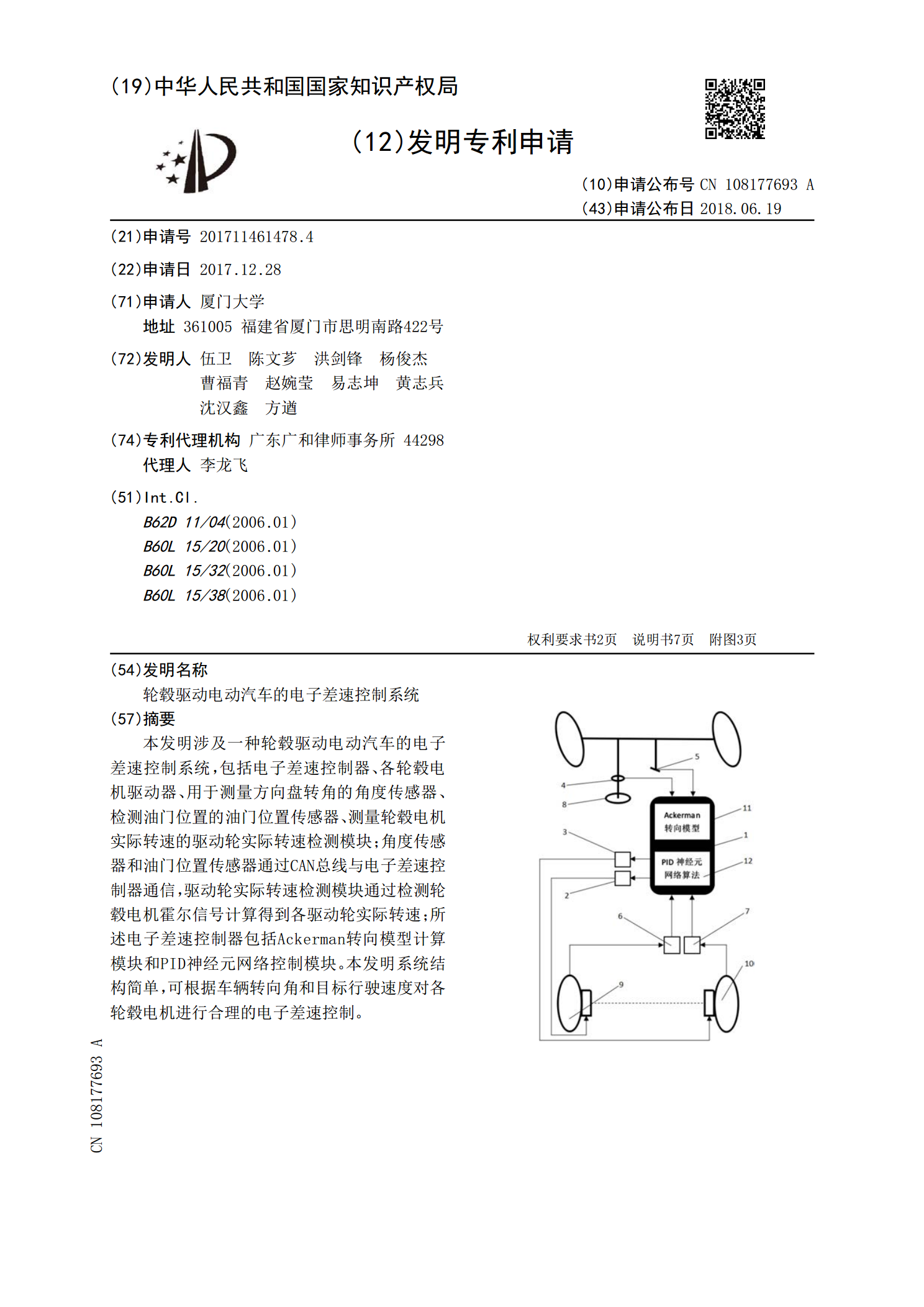
本发明涉及一种轮毂驱动电动汽车的电子差速控制系统,包括电子差速控制器、各轮毂电机驱动器、用于测量方向盘转角的角度传感器、检测油门位置的油门位置传感器、测量轮毂电机实际转速的驱动轮实际转速检测模块;角度传感器和油门位置传感器通过CAN总线与电子差速控制器通信,驱动轮实际转速检测模块通过检测轮毂电机霍尔信号计算得到各驱动轮实际转速;所述电子差速控制器包括Ackerman转向模型计算模块和PID神经元网络控制模块。本发明系统结构简单,可根据车辆转向角和目标行驶速度对各轮毂电机进行合理的电子差速控制。

分布式驱动电动汽车电子差速研究的任务书.docx
分布式驱动电动汽车电子差速研究的任务书任务书:一、研究背景随着环保意识的不断提高,电动汽车已经成为了既不污染环境,又能减少石油资源消耗的重要交通工具。电动汽车的发展离不开电子差速技术的支持,而现有的电子差速系统一般采用中央控制的方式,在控制效率、可靠性和稳定性方面存在局限性。因此,为实现更高的控制精度和更好的驾驶体验,需要研究新型分布式驱动电动汽车电子差速系统。二、研究目的本研究旨在探索分布式驱动电动汽车电子差速系统的工作原理、控制方法以及应用效果,具体目的为:1.设计满足分布式驱动电动汽车需求的电子差速

电动轮驱动汽车的电子差速控制系统.pdf
本发明涉及电动轮驱动汽车的电子差速控制系统,它包括控制器、各轮毂电机的电机控制器、用于测量方向盘转角的转角传感器、能输出开度值的电子加速踏板、用于测量轮毂电机实际转速的转速传感器;电子加速踏板、转速传感器、转角传感器的信号输出端分别和控制器的信号输入端连接,控制器与各轮毂电机控制器通讯连接;所述控制器包括第一级跟随控制模块和第二级跟随控制模块。本发明可对各驱动电机进行合理的电子差速控制。