
一种适用于旋转阶梯的行星轮式越障机器人.pdf

书生****ma


1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种适用于旋转阶梯的行星轮式越障机器人.pdf
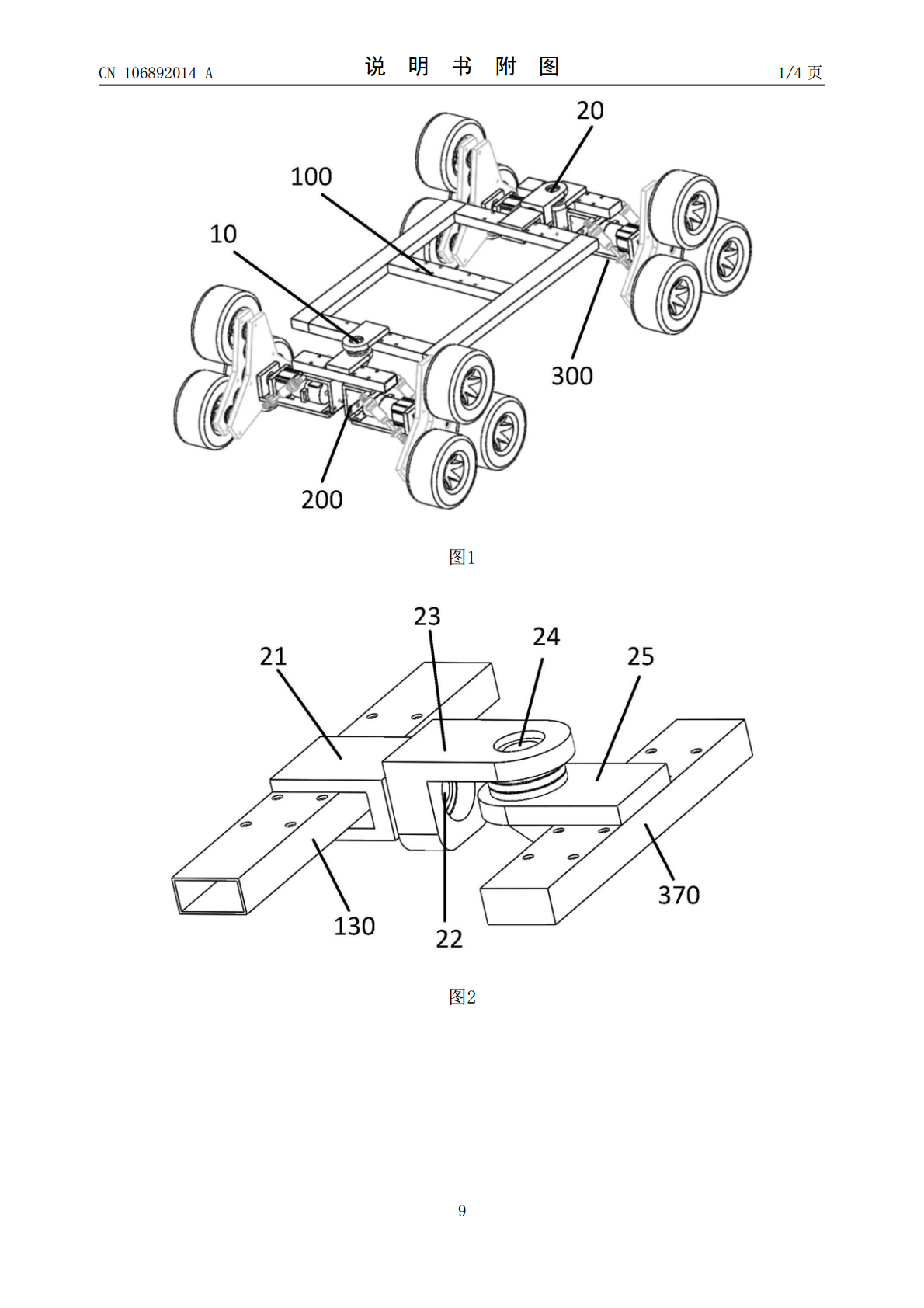
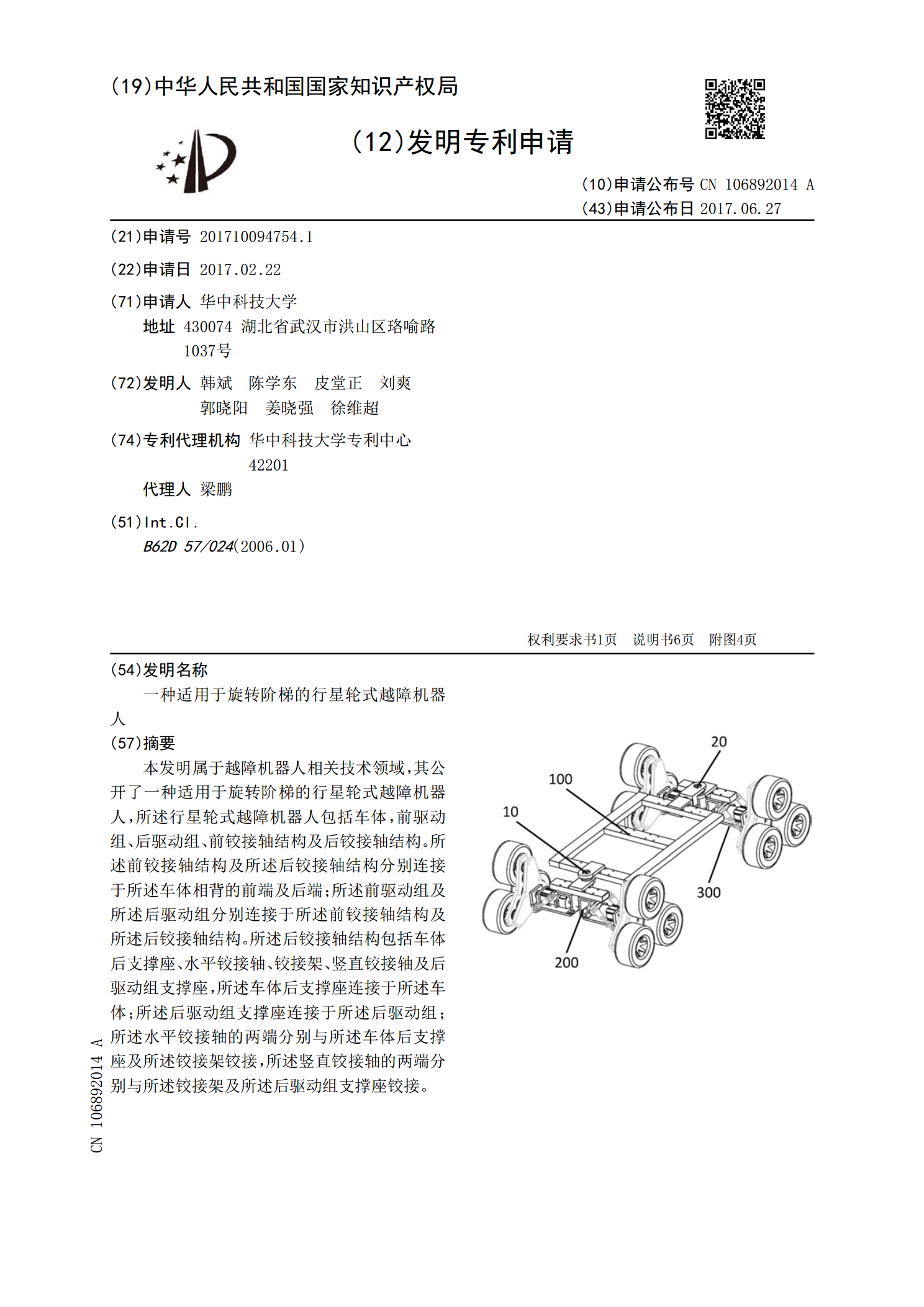
本发明属于越障机器人相关技术领域,其公开了一种适用于旋转阶梯的行星轮式越障机器人,所述行星轮式越障机器人包括车体,前驱动组、后驱动组、前铰接轴结构及后铰接轴结构。所述前铰接轴结构及所述后铰接轴结构分别连接于所述车体相背的前端及后端;所述前驱动组及所述后驱动组分别连接于所述前铰接轴结构及所述后铰接轴结构。所述后铰接轴结构包括车体后支撑座、水平铰接轴、铰接架、竖直铰接轴及后驱动组支撑座,所述车体后支撑座连接于所述车体;所述后驱动组支撑座连接于所述后驱动组;所述水平铰接轴的两端分别与所述车体后支撑座及所述铰接架
一种行星轮式越障机器人.pdf
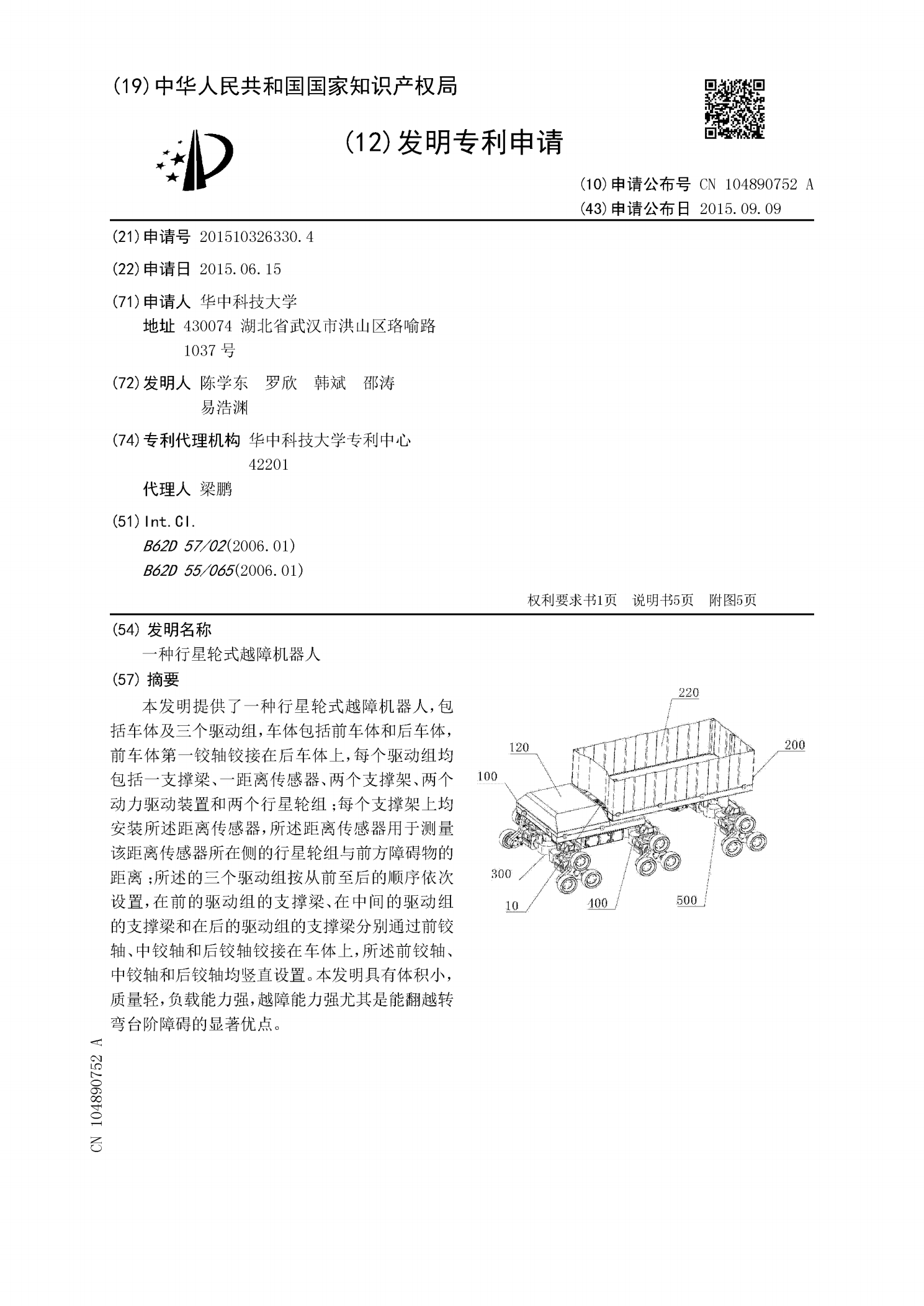
本发明提供了一种行星轮式越障机器人,包括车体及三个驱动组,车体包括前车体和后车体,前车体第一铰轴铰接在后车体上,每个驱动组均包括一支撑梁、一距离传感器、两个支撑架、两个动力驱动装置和两个行星轮组;每个支撑架上均安装所述距离传感器,所述距离传感器用于测量该距离传感器所在侧的行星轮组与前方障碍物的距离;所述的三个驱动组按从前至后的顺序依次设置,在前的驱动组的支撑梁、在中间的驱动组的支撑梁和在后的驱动组的支撑梁分别通过前铰轴、中铰轴和后铰轴铰接在车体上,所述前铰轴、中铰轴和后铰轴均竖直设置。本发明具有体积小,质

一种行星轮式越障机器人爬楼梯控制方法.pdf
本发明公开了一种行星轮式越障机器人爬楼梯控制方法,包括如下步骤:1)保持越障机器人匀速直线前进,测量其同一驱动组中两行星轮组与前方台阶的距离及行星轮组的转速,并计算偏转角;2)计算各行星轮组的理论转速,并使行星轮组以计算得出的转速进行运动;3)检测当前的L

一种轮式越障机器人.pdf
本发明公开了一种轮式越障机器人。所述轮式越障机器人包括:支架、越障轮、越障轮安装架、越障轮驱动机构、越障轮转向驱动机构、第一行走轮、第一行走轮转向驱动机构、第二行走轮、第二行走轮转向驱动机构和两个行走轮驱动机构,支架包括:第一支管、第二支管和第三支管,第一支管和第二支管相对布置在第一平面内,第三支管的一端安装在第一支管上。在有障碍、沟壑或台阶的路况下,越障轮安装架通过转轴相对于支架进行转动,越障轮跟随越障轮安装架转动并越过障碍物、沟壑或越至台阶顶面,通过越障轮驱动机构驱动越障轮转动,与第一行走轮或第一行走
一种轮式越障机器人.pdf
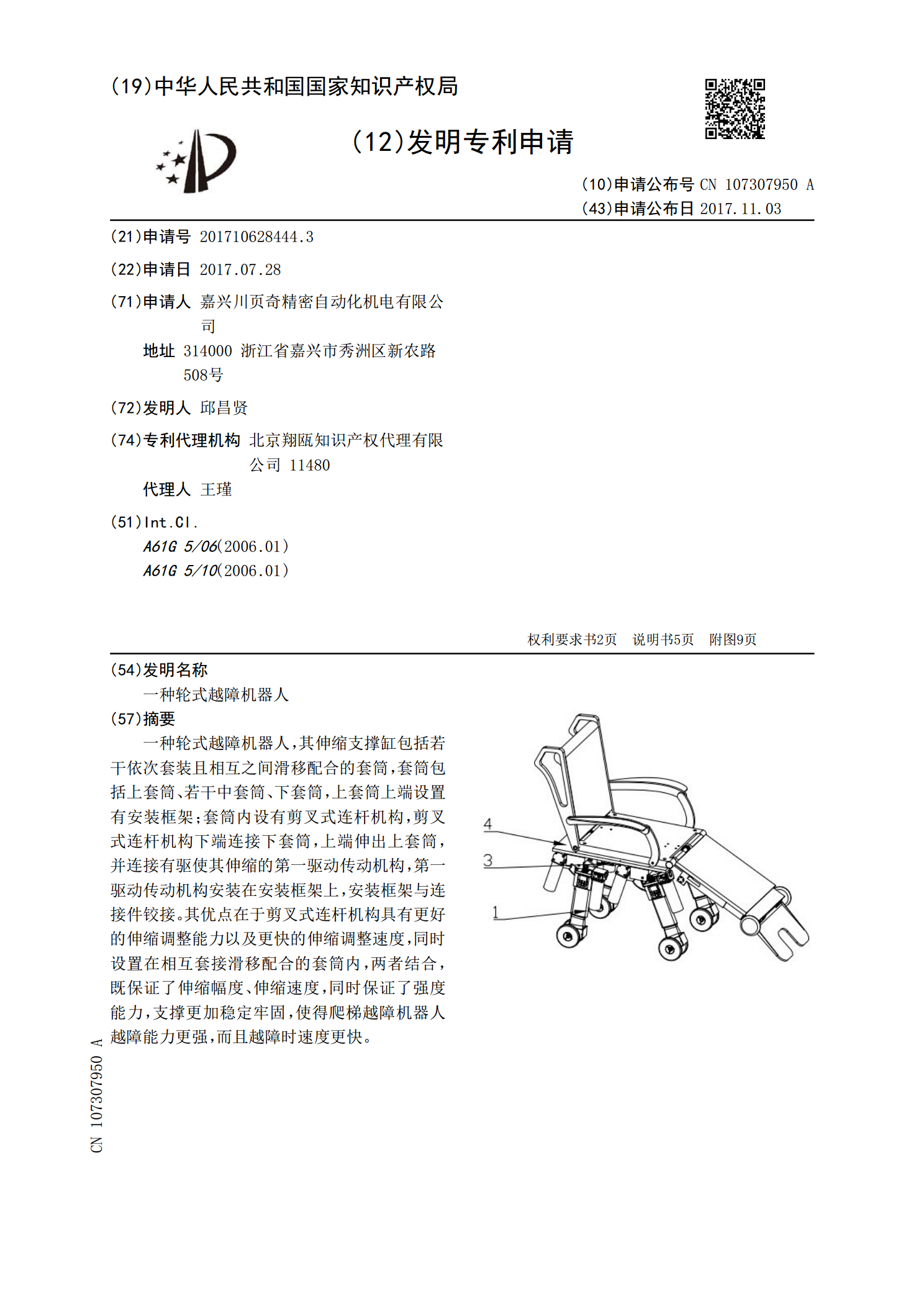
一种轮式越障机器人,其伸缩支撑缸包括若干依次套装且相互之间滑移配合的套筒,套筒包括上套筒、若干中套筒、下套筒,上套筒上端设置有安装框架;套筒内设有剪叉式连杆机构,剪叉式连杆机构下端连接下套筒,上端伸出上套筒,并连接有驱使其伸缩的第一驱动传动机构,第一驱动传动机构安装在安装框架上,安装框架与连接件铰接。其优点在于剪叉式连杆机构具有更好的伸缩调整能力以及更快的伸缩调整速度,同时设置在相互套接滑移配合的套筒内,两者结合,既保证了伸缩幅度、伸缩速度,同时保证了强度能力,支撑更加稳定牢固,使得爬梯越障机器人越障能力