
一种用于膜式水冷壁销钉焊接的机器人闭环加工系统.pdf

努力****妙风


1/9

2/9

3/9
4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于膜式水冷壁销钉焊接的机器人闭环加工系统.pdf
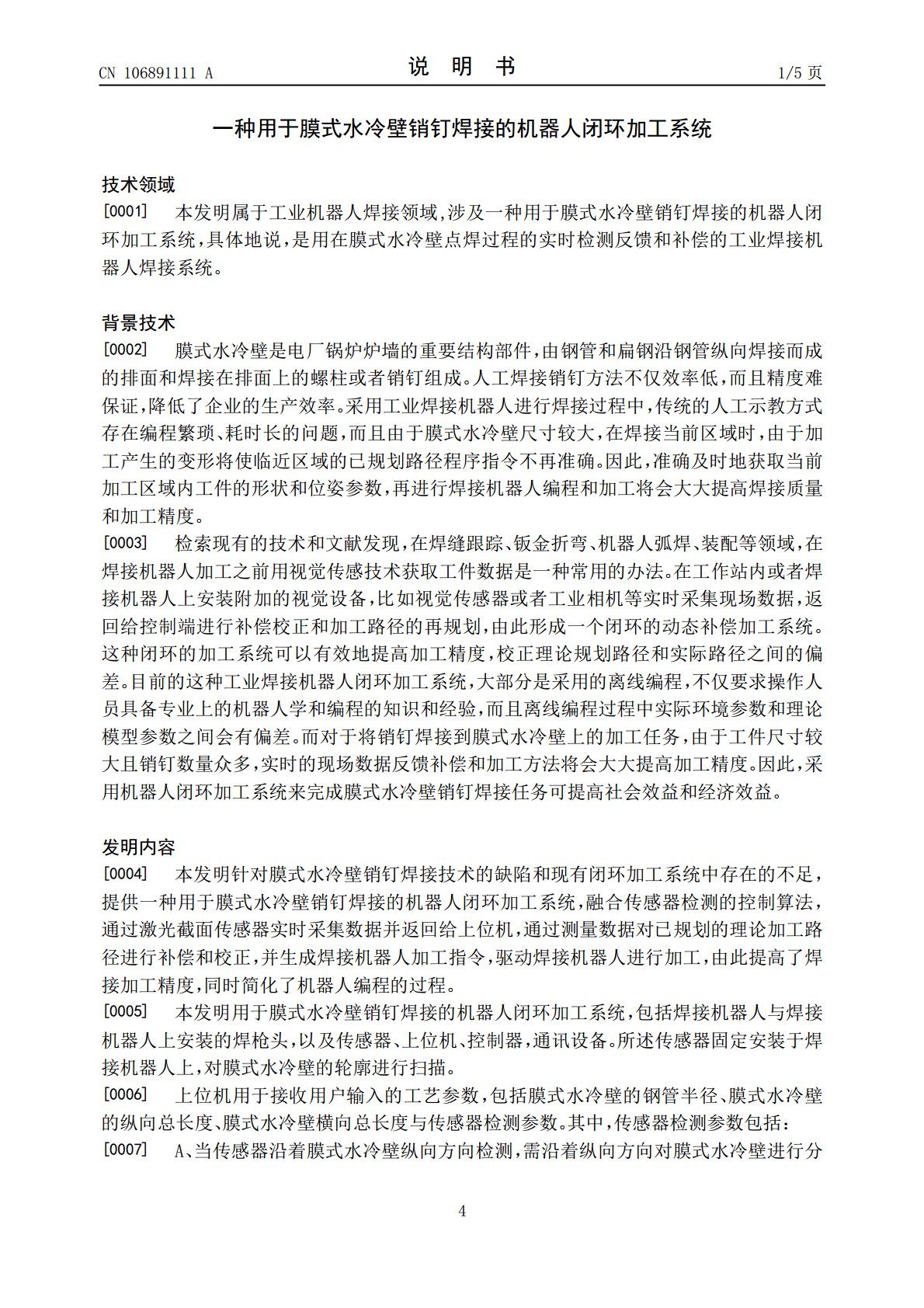
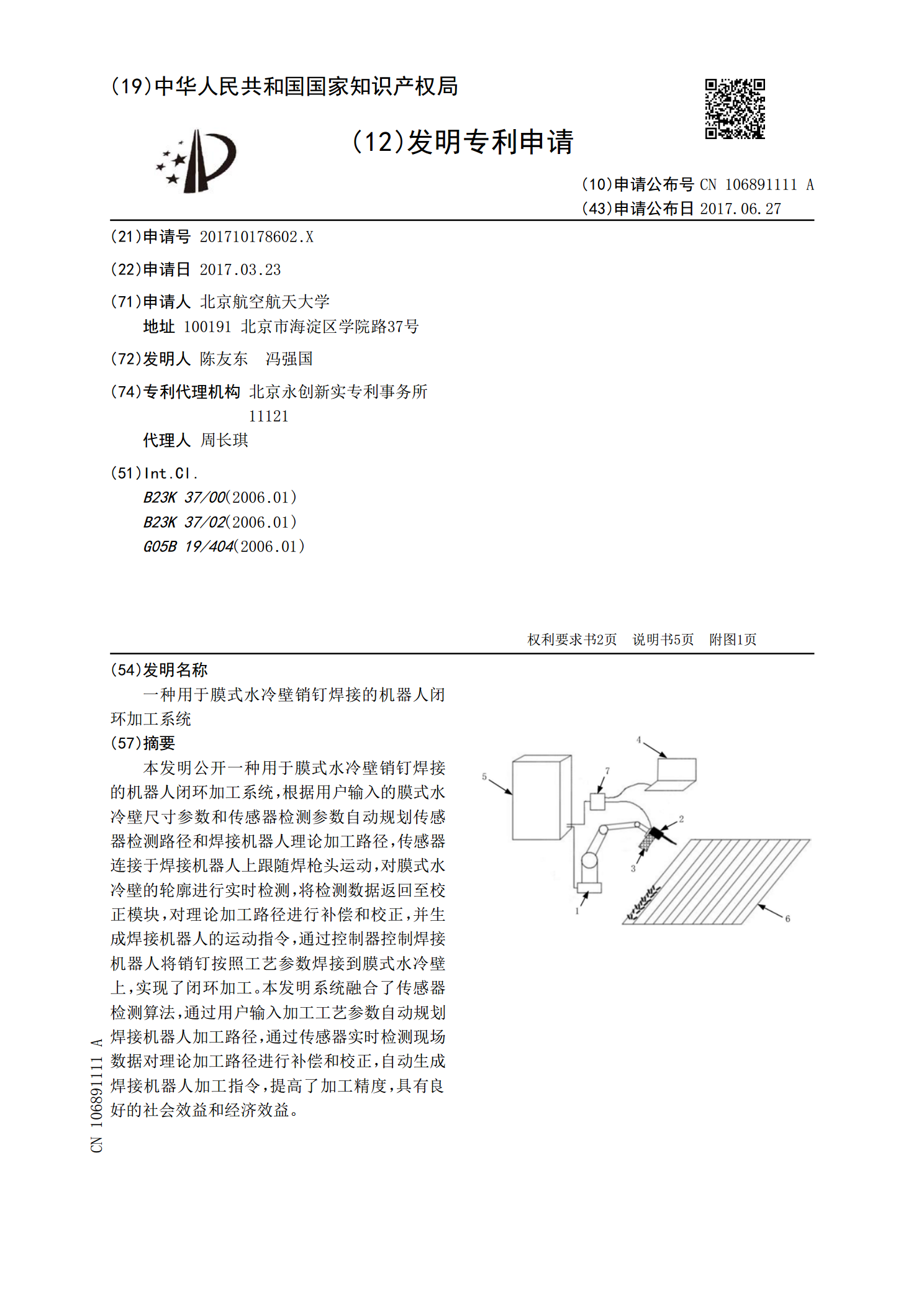
本发明公开一种用于膜式水冷壁销钉焊接的机器人闭环加工系统,根据用户输入的膜式水冷壁尺寸参数和传感器检测参数自动规划传感器检测路径和焊接机器人理论加工路径,传感器连接于焊接机器人上跟随焊枪头运动,对膜式水冷壁的轮廓进行实时检测,将检测数据返回至校正模块,对理论加工路径进行补偿和校正,并生成焊接机器人的运动指令,通过控制器控制焊接机器人将销钉按照工艺参数焊接到膜式水冷壁上,实现了闭环加工。本发明系统融合了传感器检测算法,通过用户输入加工工艺参数自动规划焊接机器人加工路径,通过传感器实时检测现场数据对理论加工路

一种膜式换热壁销钉焊接组件.pdf
本实用新型公开了一种膜式换热壁销钉焊接组件,包括高频焊枪,所述高频焊枪的枪头端部设有容纳销钉的销钉槽,围绕所述销钉槽的槽口设有高频感应线圈,所述高频焊枪设置有操作把手,所述操作把手底部与冷却接头卡接,所述冷却接头连通有冷却介质输入管,所述冷却接头还与冷却介质输出管连通,所述冷却介质输出管出口与销钉槽槽口相对,所述冷却介质输出管出口与销钉槽槽口之间的空间容纳换热壁板。通过使用本申请所述的焊接组件,在换热壁外表面将销钉高频焊接,在换热壁内表面对换热壁进行局部降温,使得只有焊接的位置进行了熔融和应力变化,其他周

膜式水冷壁焊接工艺.doc
膜式水冷壁焊接工艺循环流化床锅炉是目前新兴的电站锅炉,用以代替煤粉锅炉,广泛用于中小型电站。具有节省能源,污染少,成本低,可燃烧多煤种,特别是劣质煤等优点,目前正大力提倡用以替代煤粉锅炉。但由于水冷壁采用的是膜式水冷壁,成排管在地面组对时增加了不少困难,空间位置为水平固定加障碍,焊接工艺有较大的变化。现就YG75/3.82-M1型锅炉水冷壁组焊工艺探讨如下。一.组对及焊接过程中常见的问题及原因。1.组对错口膜式壁在制造中由于鳍片的宽度及焊接位置误差造成管中心间距不一致,另外膜式壁在与管子焊接时及在运输过程
一种用于膜式水冷壁堆焊的焊枪模组.pdf
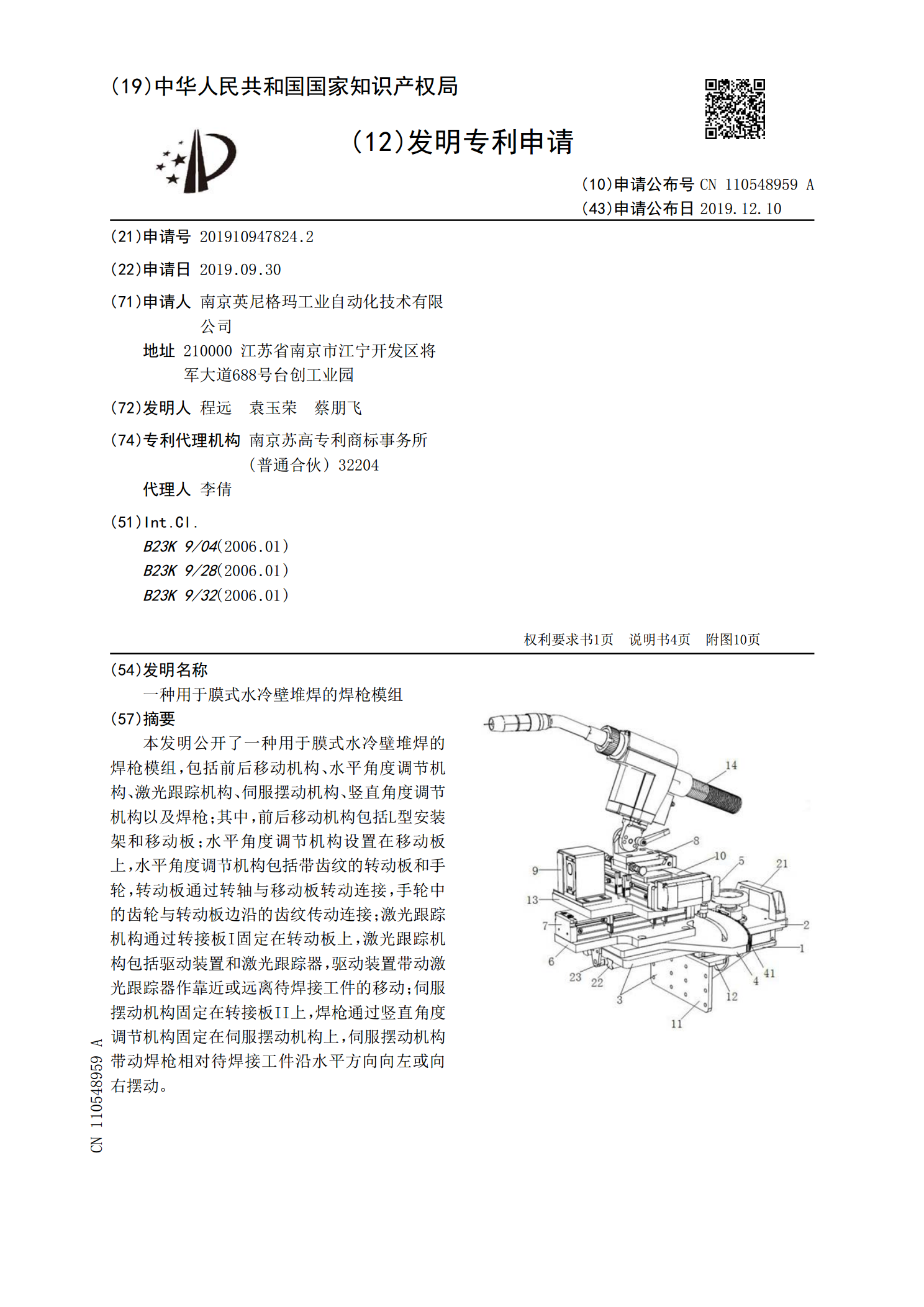
本发明公开了一种用于膜式水冷壁堆焊的焊枪模组,包括前后移动机构、水平角度调节机构、激光跟踪机构、伺服摆动机构、竖直角度调节机构以及焊枪;其中,前后移动机构包括L型安装架和移动板;水平角度调节机构设置在移动板上,水平角度调节机构包括带齿纹的转动板和手轮,转动板通过转轴与移动板转动连接,手轮中的齿轮与转动板边沿的齿纹传动连接;激光跟踪机构通过转接板I固定在转动板上,激光跟踪机构包括驱动装置和激光跟踪器,驱动装置带动激光跟踪器作靠近或远离待焊接工件的移动;伺服摆动机构固定在转接板II上,焊枪通过竖直角度调节机构
锅炉膜式水冷壁间隙焊接缺陷检修方法.pdf
本发明提供了一种锅炉膜式水冷壁间隙焊接缺陷检修方法,包括:S1、确认焊接缺陷种类后对其位置进行标记;S2、当焊接缺陷位于打底层时,在焊接缺陷位置采用全抛开方式开设全抛坡口;当焊接缺陷位于盖面层时,将焊接缺陷锉开形成半抛坡口;S3、当焊接缺陷位于打底层时,焊枪从全抛坡口的高点引弧,并横向摆动,焊丝端部靠近熔池背面,而后对焊口进行盖面焊接;当焊接缺陷位于盖面层时,焊丝设置于半抛坡口的一侧,焊枪将焊丝熔化,当熔化后的焊丝铁水量超过母材达到预设高度时息弧。其能够对焊接缺陷进行准确定位,并能够对位于母材打底层或盖面