
中央驱动式下肢外骨骼机器人.pdf

雨巷****碧易

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

中央驱动式下肢外骨骼机器人.pdf
本发明涉及一种中央驱动式下肢外骨骼机器人,背部组件中的电机通过减速器和齿轮组传动连接输出轴,输出轴通过同步带组件连接位于左、右腿上的花键组件,电机通过减速器、齿轮、输出轴、同步带组件和花键组件将力矩传递到髋关节,从而实现一个电机分别为左右两腿在摆动期时提供助力力矩。相对于多电机驱动式下肢助力外骨骼重量更轻,更节能。利用电磁推杆作为传动机构控制电机驱动力矩是否传递到髋关节,传动结构更为简单,控制更为方便。利用缆绳将两个大腿组件连接起来,实现利用人体重心的变化带动缆绳运动,起到一定助力效果。本发明可实现通过一
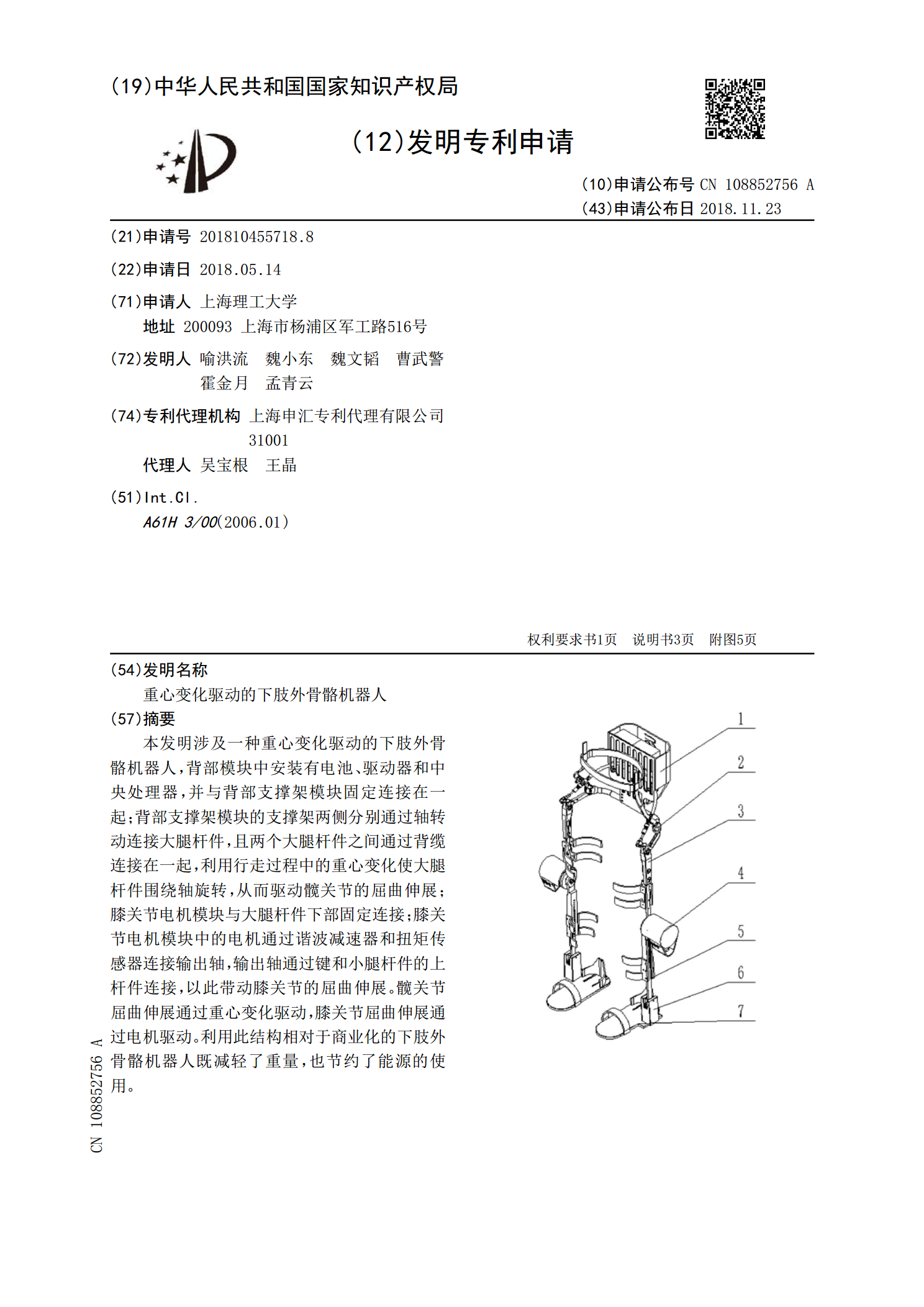
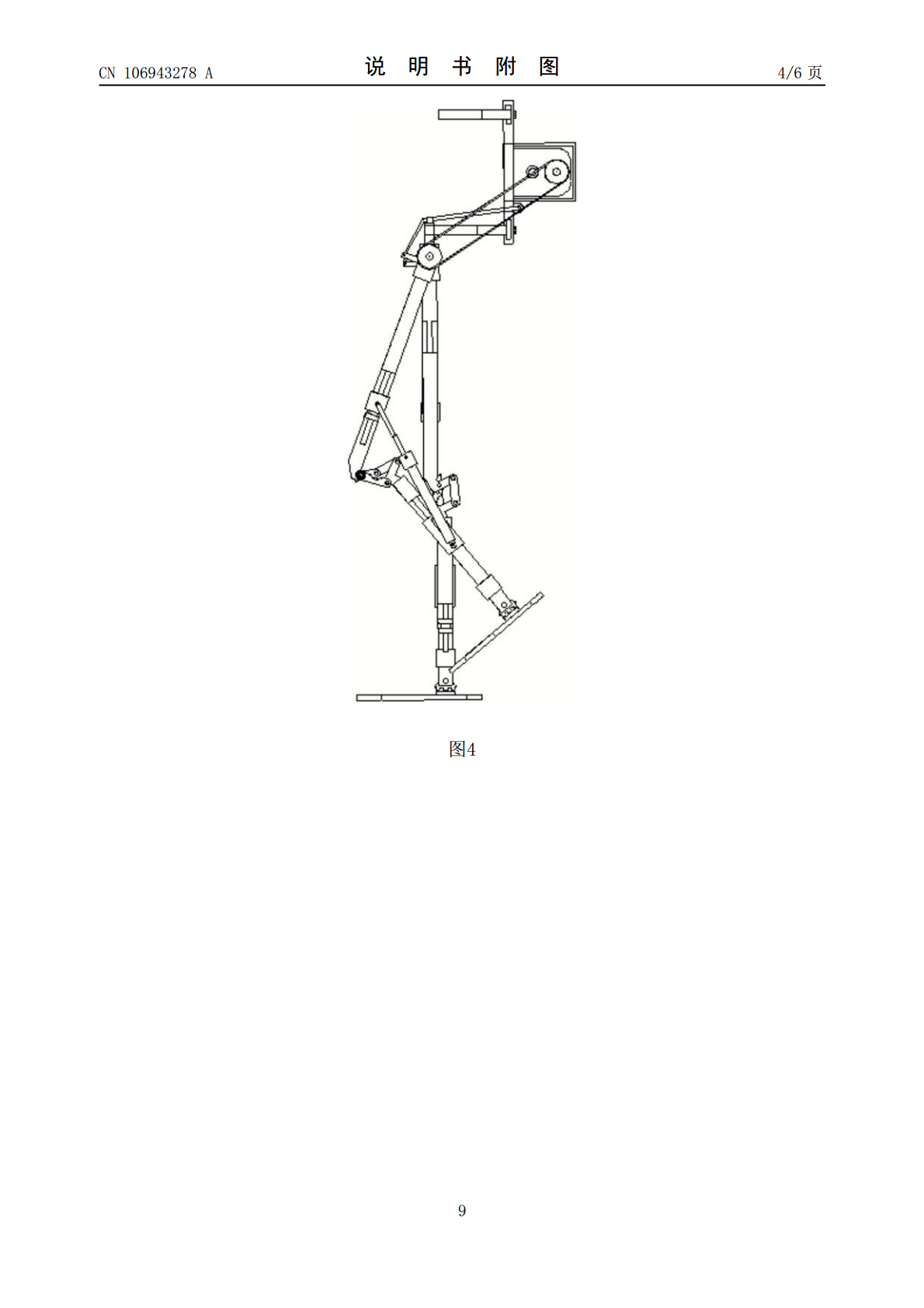
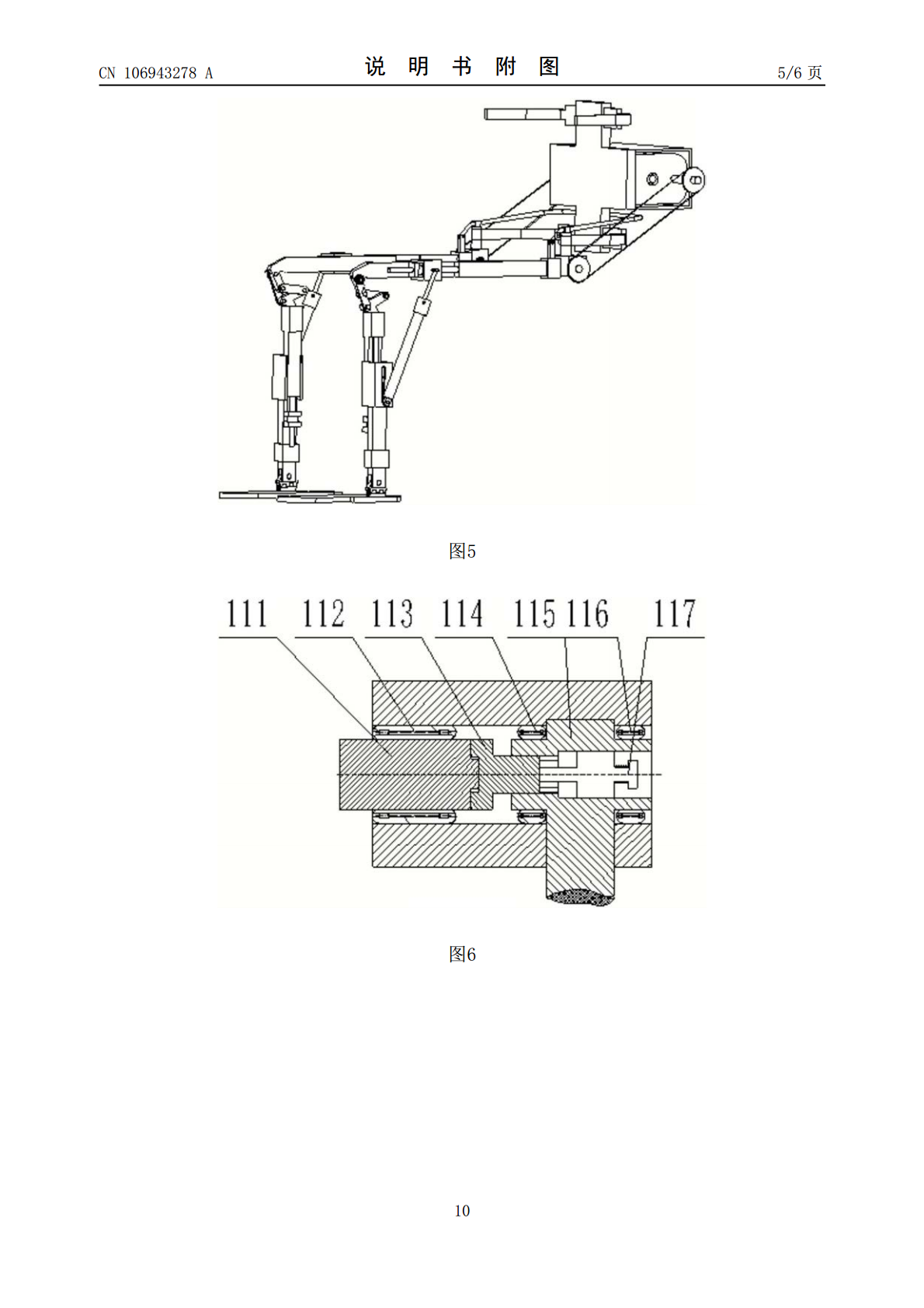
重心变化驱动的下肢外骨骼机器人.pdf
本发明涉及一种重心变化驱动的下肢外骨骼机器人,背部模块中安装有电池、驱动器和中央处理器,并与背部支撑架模块固定连接在一起;背部支撑架模块的支撑架两侧分别通过轴转动连接大腿杆件,且两个大腿杆件之间通过背缆连接在一起,利用行走过程中的重心变化使大腿杆件围绕轴旋转,从而驱动髋关节的屈曲伸展;膝关节电机模块与大腿杆件下部固定连接;膝关节电机模块中的电机通过谐波减速器和扭矩传感器连接输出轴,输出轴通过键和小腿杆件的上杆件连接,以此带动膝关节的屈曲伸展。髋关节屈曲伸展通过重心变化驱动,膝关节屈曲伸展通过电机驱动。利用
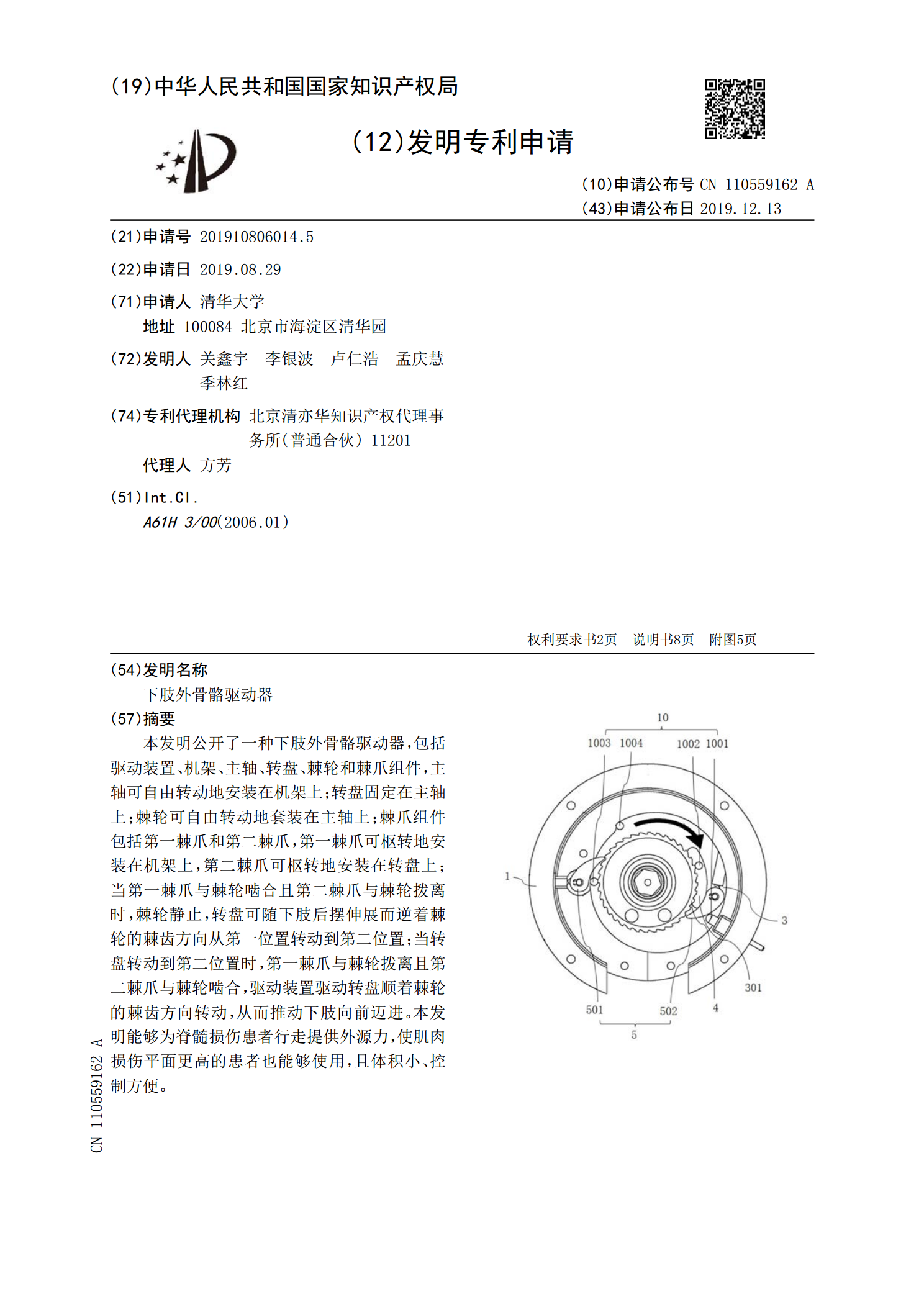
下肢外骨骼驱动器.pdf
本发明公开了一种下肢外骨骼驱动器,包括驱动装置、机架、主轴、转盘、棘轮和棘爪组件,主轴可自由转动地安装在机架上;转盘固定在主轴上;棘轮可自由转动地套装在主轴上;棘爪组件包括第一棘爪和第二棘爪,第一棘爪可枢转地安装在机架上,第二棘爪可枢转地安装在转盘上;当第一棘爪与棘轮啮合且第二棘爪与棘轮拨离时,棘轮静止,转盘可随下肢后摆伸展而逆着棘轮的棘齿方向从第一位置转动到第二位置;当转盘转动到第二位置时,第一棘爪与棘轮拨离且第二棘爪与棘轮啮合,驱动装置驱动转盘顺着棘轮的棘齿方向转动,从而推动下肢向前迈进。本发明能够为
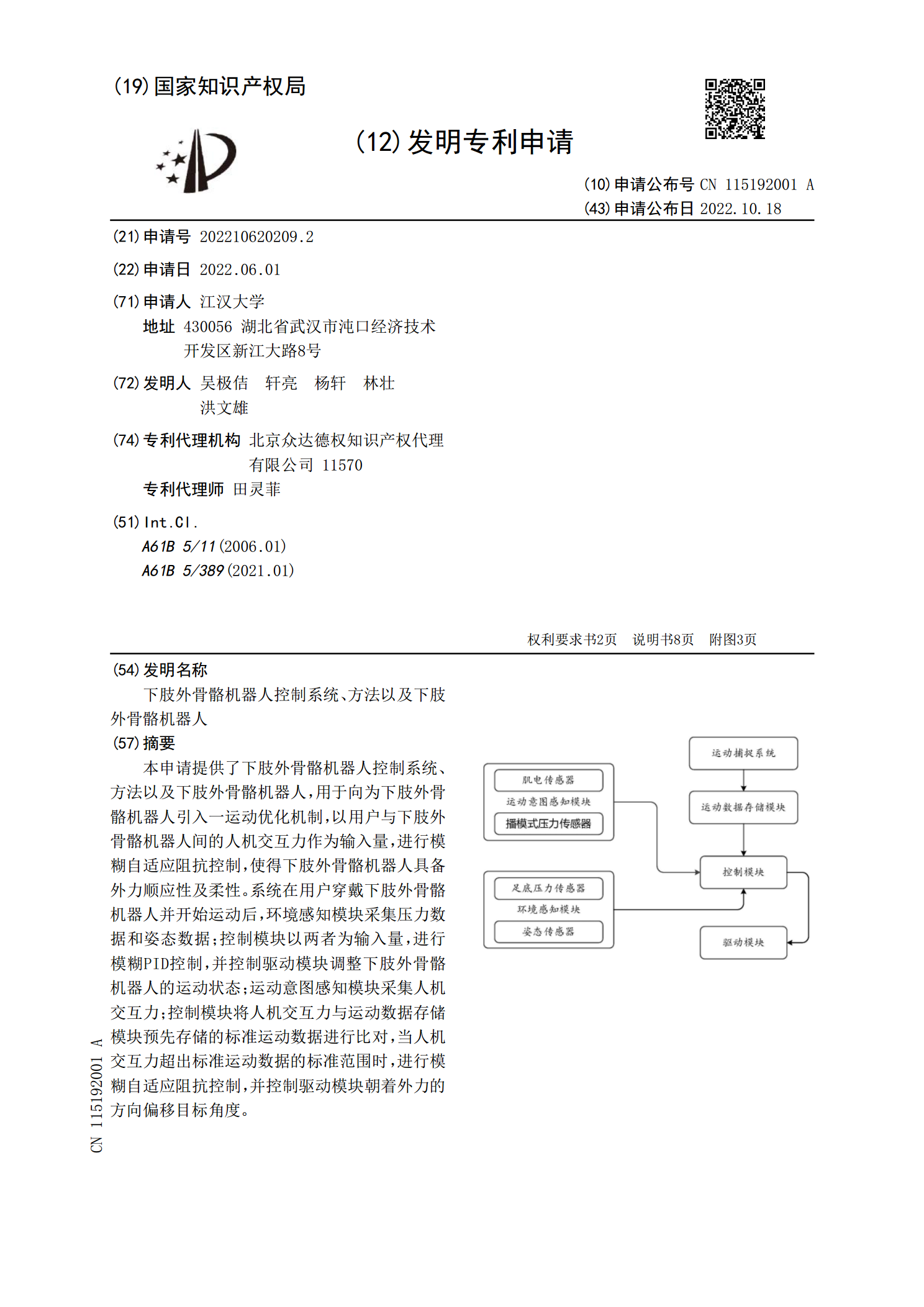
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf
本申请提供了下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人,用于向为下肢外骨骼机器人引入一运动优化机制,以用户与下肢外骨骼机器人间的人机交互力作为输入量,进行模糊自适应阻抗控制,使得下肢外骨骼机器人具备外力顺应性及柔性。系统在用户穿戴下肢外骨骼机器人并开始运动后,环境感知模块采集压力数据和姿态数据;控制模块以两者为输入量,进行模糊PID控制,并控制驱动模块调整下肢外骨骼机器人的运动状态;运动意图感知模块采集人机交互力;控制模块将人机交互力与运动数据存储模块预先存储的标准运动数据进行比对,当人机交互力超
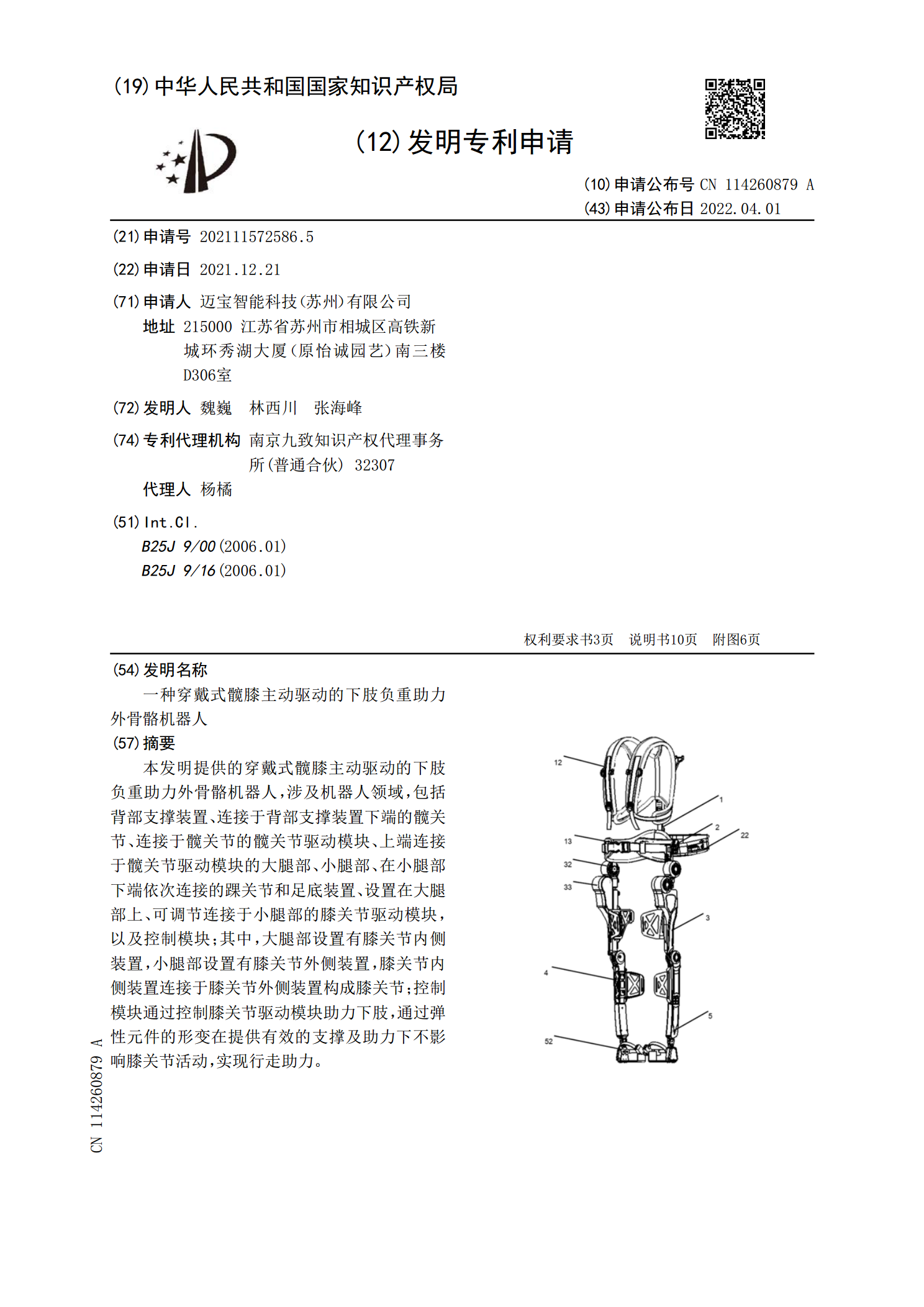
一种穿戴式髋膝主动驱动的下肢负重助力外骨骼机器人.pdf
本发明提供的穿戴式髋膝主动驱动的下肢负重助力外骨骼机器人,涉及机器人领域,包括背部支撑装置、连接于背部支撑装置下端的髋关节、连接于髋关节的髋关节驱动模块、上端连接于髋关节驱动模块的大腿部、小腿部、在小腿部下端依次连接的踝关节和足底装置、设置在大腿部上、可调节连接于小腿部的膝关节驱动模块,以及控制模块;其中,大腿部设置有膝关节内侧装置,小腿部设置有膝关节外侧装置,膝关节内侧装置连接于膝关节外侧装置构成膝关节;控制模块通过控制膝关节驱动模块助力下肢,通过弹性元件的形变在提供有效的支撑及助力下不影响膝关节活动,