
一种考虑齿轮和轴承非线性耦合的传动系统数值模拟方法.pdf

书生****写意

1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种考虑齿轮和轴承非线性耦合的传动系统数值模拟方法.pdf
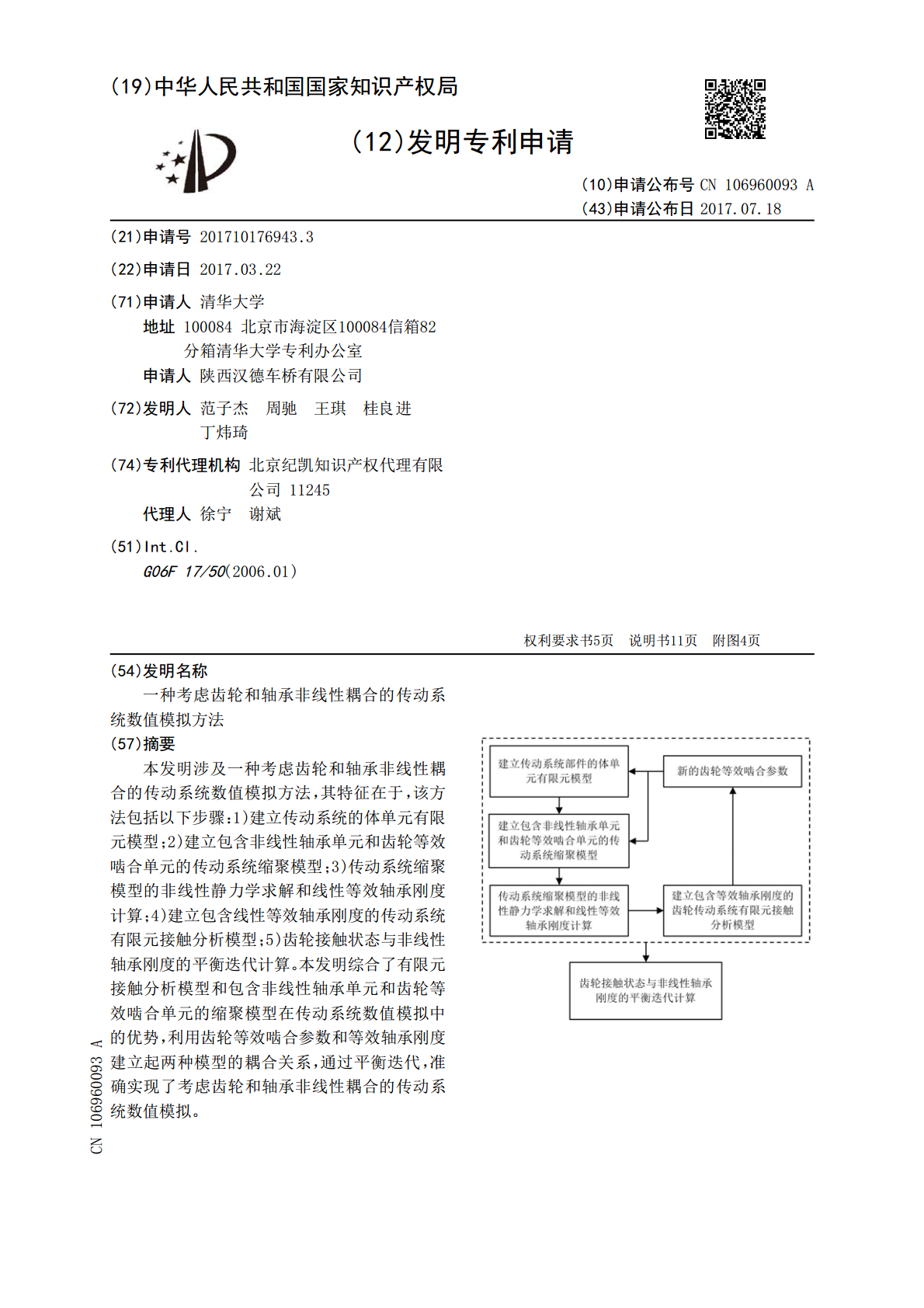
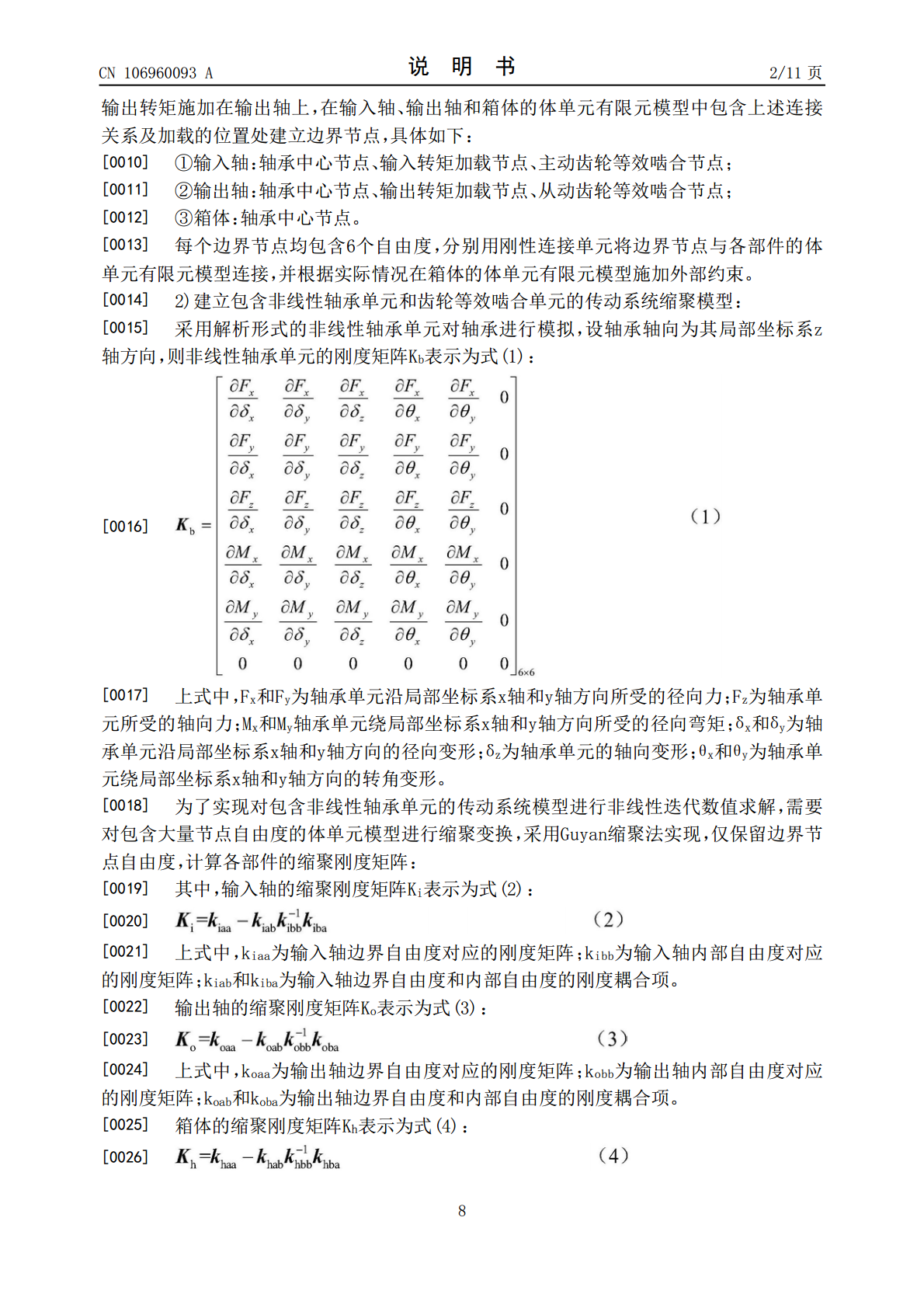
本发明涉及一种考虑齿轮和轴承非线性耦合的传动系统数值模拟方法,其特征在于,该方法包括以下步骤:1)建立传动系统的体单元有限元模型;2)建立包含非线性轴承单元和齿轮等效啮合单元的传动系统缩聚模型;3)传动系统缩聚模型的非线性静力学求解和线性等效轴承刚度计算;4)建立包含线性等效轴承刚度的传动系统有限元接触分析模型;5)齿轮接触状态与非线性轴承刚度的平衡迭代计算。本发明综合了有限元接触分析模型和包含非线性轴承单元和齿轮等效啮合单元的缩聚模型在传动系统数值模拟中的优势,利用齿轮等效啮合参数和等效轴承刚度建立起两
一种考虑轴承刚度耦合非线性的多支撑轴系有限元方法.pdf
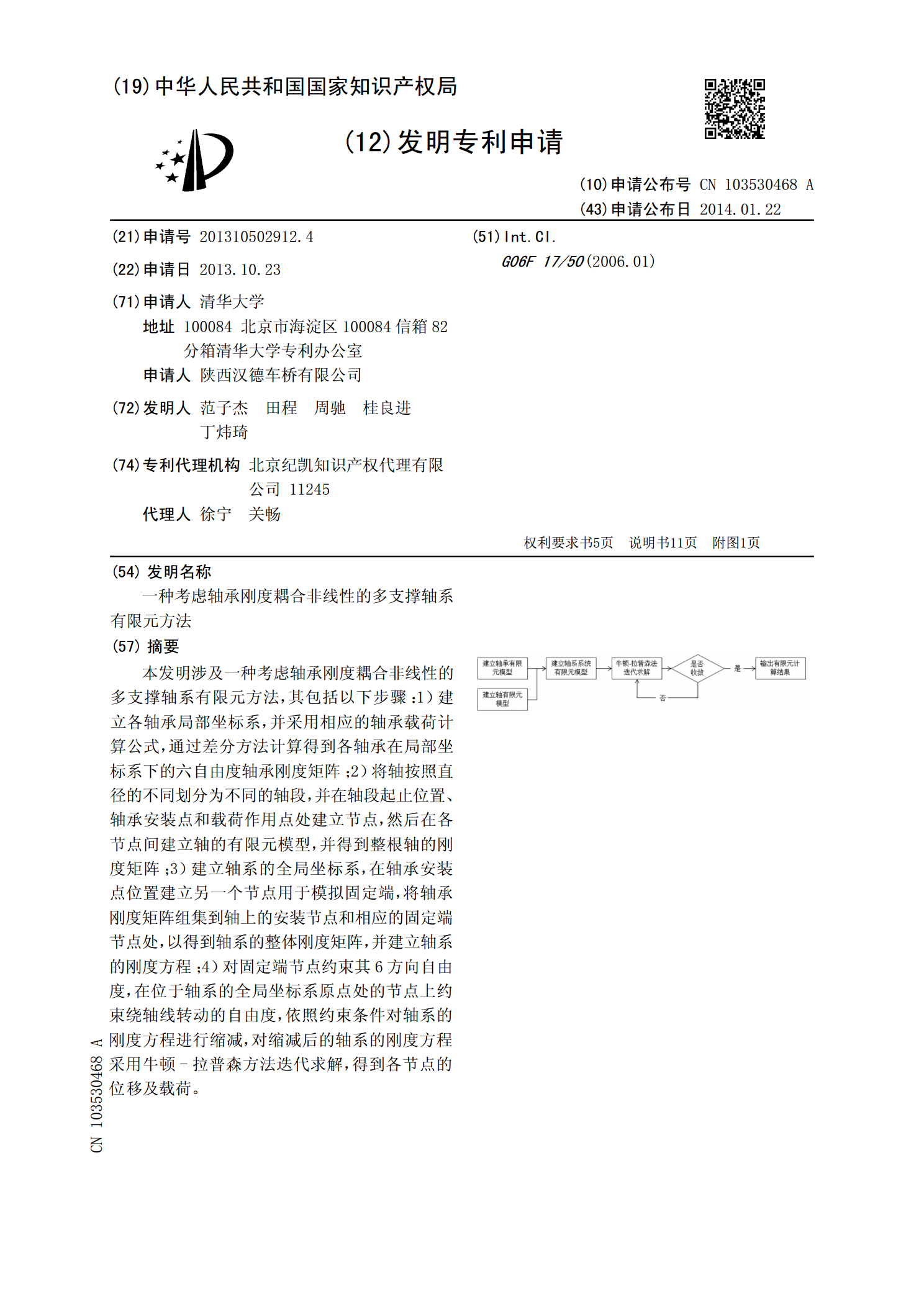
本发明涉及一种考虑轴承刚度耦合非线性的多支撑轴系有限元方法,其包括以下步骤:1)建立各轴承局部坐标系,并采用相应的轴承载荷计算公式,通过差分方法计算得到各轴承在局部坐标系下的六自由度轴承刚度矩阵;2)将轴按照直径的不同划分为不同的轴段,并在轴段起止位置、轴承安装点和载荷作用点处建立节点,然后在各节点间建立轴的有限元模型,并得到整根轴的刚度矩阵;3)建立轴系的全局坐标系,在轴承安装点位置建立另一个节点用于模拟固定端,将轴承刚度矩阵组集到轴上的安装节点和相应的固定端节点处,以得到轴系的整体刚度矩阵,并建立轴系

考虑耦合与刚度影响的齿轮传动系统分析.pptx
考虑耦合与刚度影响的齿轮传动系统分析目录添加目录项标题齿轮传动系统概述齿轮传动的原理齿轮传动的分类齿轮传动的应用场景耦合对齿轮传动系统的影响耦合现象的描述耦合对齿轮传动性能的影响耦合对齿轮传动稳定性的影响耦合对齿轮传动效率的影响刚度对齿轮传动系统的影响刚度的定义与描述刚度对齿轮传动性能的影响刚度对齿轮传动稳定性的影响刚度对齿轮传动效率的影响考虑耦合与刚度影响的齿轮传动系统分析方法分析方法的概述耦合与刚度对齿轮传动系统影响的数学模型建立耦合与刚度对齿轮传动系统影响的仿真分析分析方法的优缺点与适用范围考虑耦合

多级齿轮传动系统耦合非线性振动特性分析.docx
多级齿轮传动系统耦合非线性振动特性分析标题:多级齿轮传动系统耦合非线性振动特性分析摘要:齿轮传动系统是广泛应用于机械设备中的一种传动方式,其振动特性对机械设备的工作状态和寿命有着重要的影响。本文针对多级齿轮传动系统的耦合非线性振动特性展开研究,通过深入分析齿轮间的相互作用以及非线性振动现象,为提高齿轮传动系统的可靠性和工作效率提供理论依据。一、引言齿轮传动系统在机械设备中具有重要的作用,但由于齿轮之间的耦合作用和非线性振动现象的存在,传动系统振动特性的研究变得尤为重要。传统的线性振动理论难以精确描述齿轮传
一种减少轴承齿轮传动系统之轴承故障率的轴承选型方法.pdf
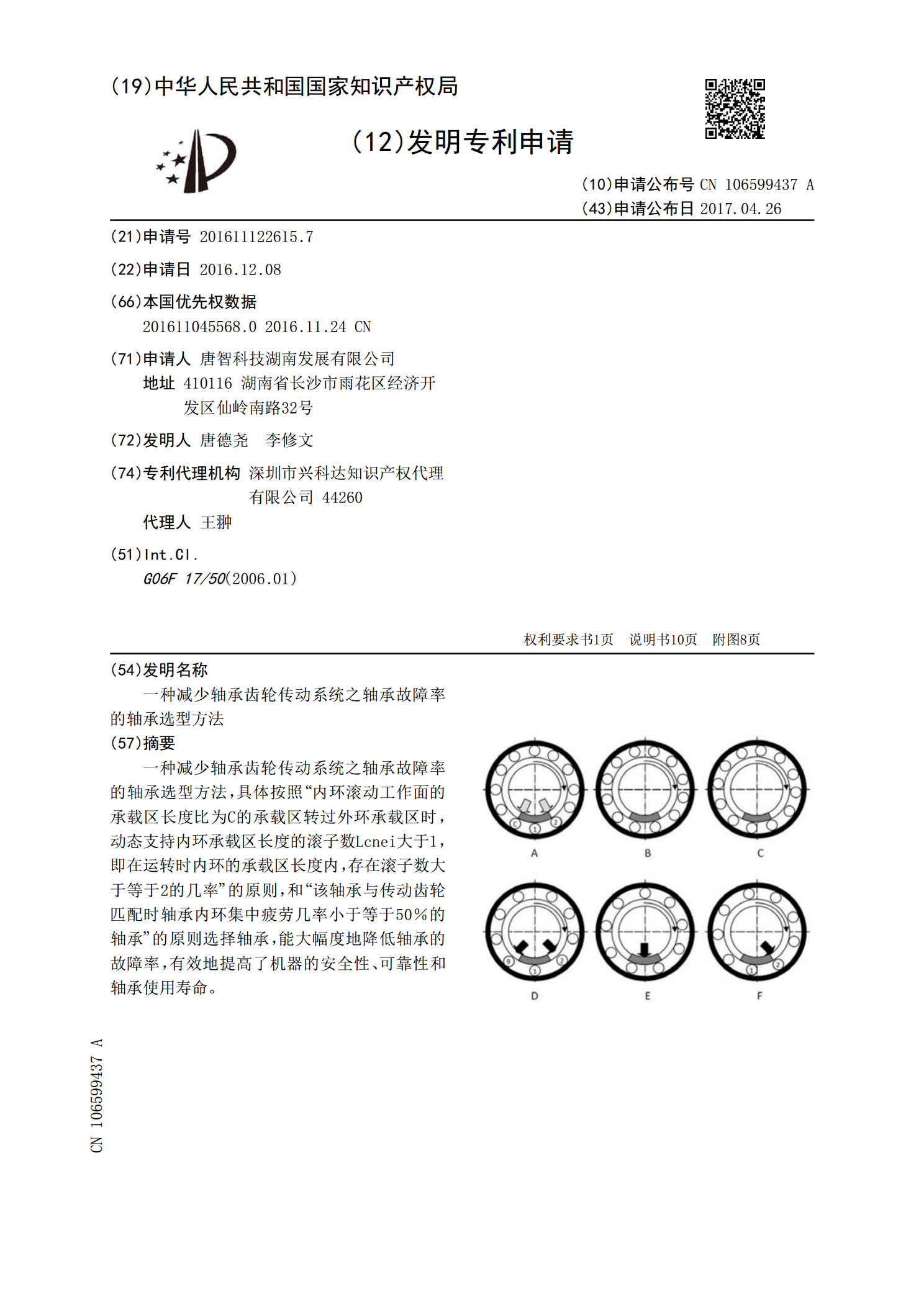
一种减少轴承齿轮传动系统之轴承故障率的轴承选型方法,具体按照“内环滚动工作面的承载区长度比为C的承载区转过外环承载区时,动态支持内环承载区长度的滚子数Lcnei大于1,即在运转时内环的承载区长度内,存在滚子数大于等于2的几率”的原则,和“该轴承与传动齿轮匹配时轴承内环集中疲劳几率小于等于50%的轴承”的原则选择轴承,能大幅度地降低轴承的故障率,有效地提高了机器的安全性、可靠性和轴承使用寿命。