
一种考虑轴承刚度耦合非线性的多支撑轴系有限元方法.pdf

雨巷****怡轩

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种考虑轴承刚度耦合非线性的多支撑轴系有限元方法.pdf
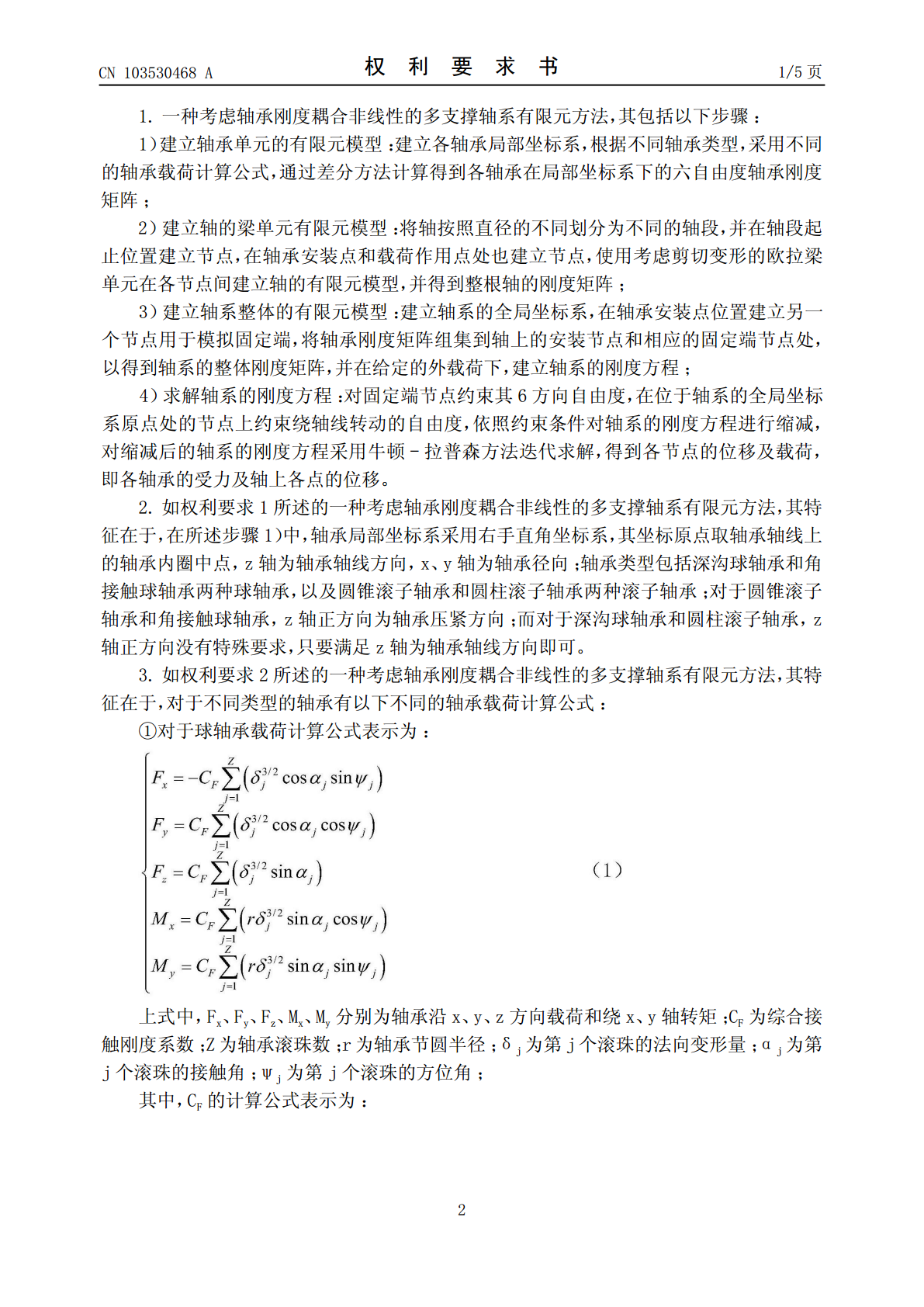
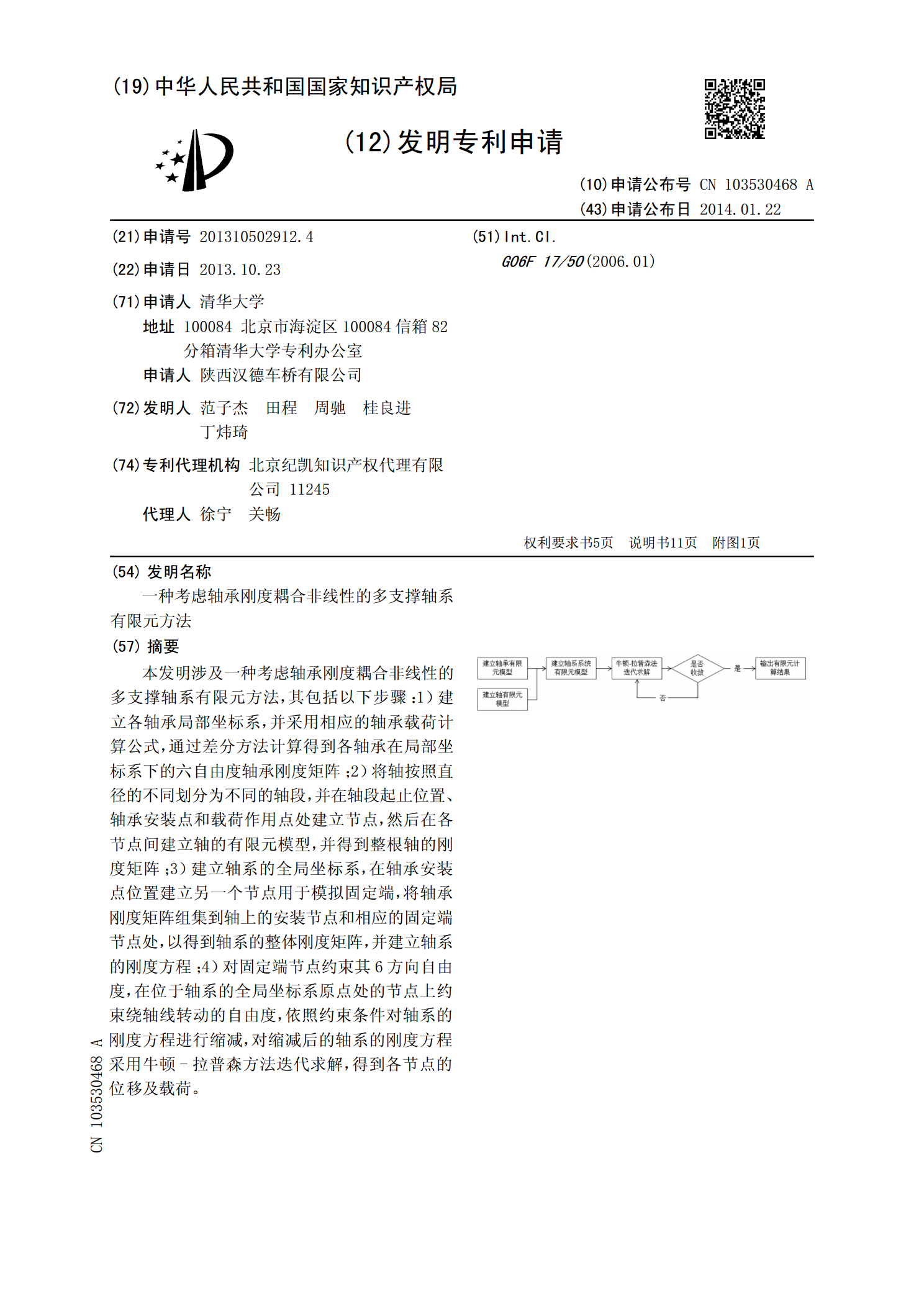
本发明涉及一种考虑轴承刚度耦合非线性的多支撑轴系有限元方法,其包括以下步骤:1)建立各轴承局部坐标系,并采用相应的轴承载荷计算公式,通过差分方法计算得到各轴承在局部坐标系下的六自由度轴承刚度矩阵;2)将轴按照直径的不同划分为不同的轴段,并在轴段起止位置、轴承安装点和载荷作用点处建立节点,然后在各节点间建立轴的有限元模型,并得到整根轴的刚度矩阵;3)建立轴系的全局坐标系,在轴承安装点位置建立另一个节点用于模拟固定端,将轴承刚度矩阵组集到轴上的安装节点和相应的固定端节点处,以得到轴系的整体刚度矩阵,并建立轴系

多支承轴系轴承受力与刚度的有限元迭代计算方法.docx
多支承轴系轴承受力与刚度的有限元迭代计算方法一、引言支轴系轴承是机械传动系统中必不可少的重要元件,它们承载着转子的重量、惯性力和转矩,同时具有一定的刚度和阻尼特性。因此,研究支轴系轴承的力学特性对于提高机械传动系统的可靠性和性能具有重要的意义。本文旨在介绍一种利用有限元迭代计算方法分析多支承轴系轴承受力与刚度的方法。二、多支承轴系轴承结构及力学模型多支承轴系轴承是由多个支承轴承组成的,在机械传动系统中广泛应用。其结构如图1所示。(插入图1)图1多支承轴系轴承结构多支承轴系轴承的力学模型如图2所示。它由转子

多轴承支撑轴系的轴承工作游隙优化研究.docx
多轴承支撑轴系的轴承工作游隙优化研究摘要:本文研究了多轴承支撑轴系中轴承工作游隙的优化问题。首先分析了轴承工作游隙对轴系性能的影响,然后提出了一种基于遗传算法的优化方法。通过改变轴承工作游隙的大小,寻找最优解,优化轴系性能。最后通过实验验证了该方法的有效性和可行性。引言:多轴承支撑轴系广泛应用于各种机械设备中,如飞机、汽车、电机等。在轴系中,轴承是承载轴向和径向负荷的重要零部件。轴承工作游隙是指轴承内圈和外圈之间的间隙,其大小对轴系的动态特性和寿命等方面都有重要影响。因此,优化轴承工作游隙是提高轴系性能的
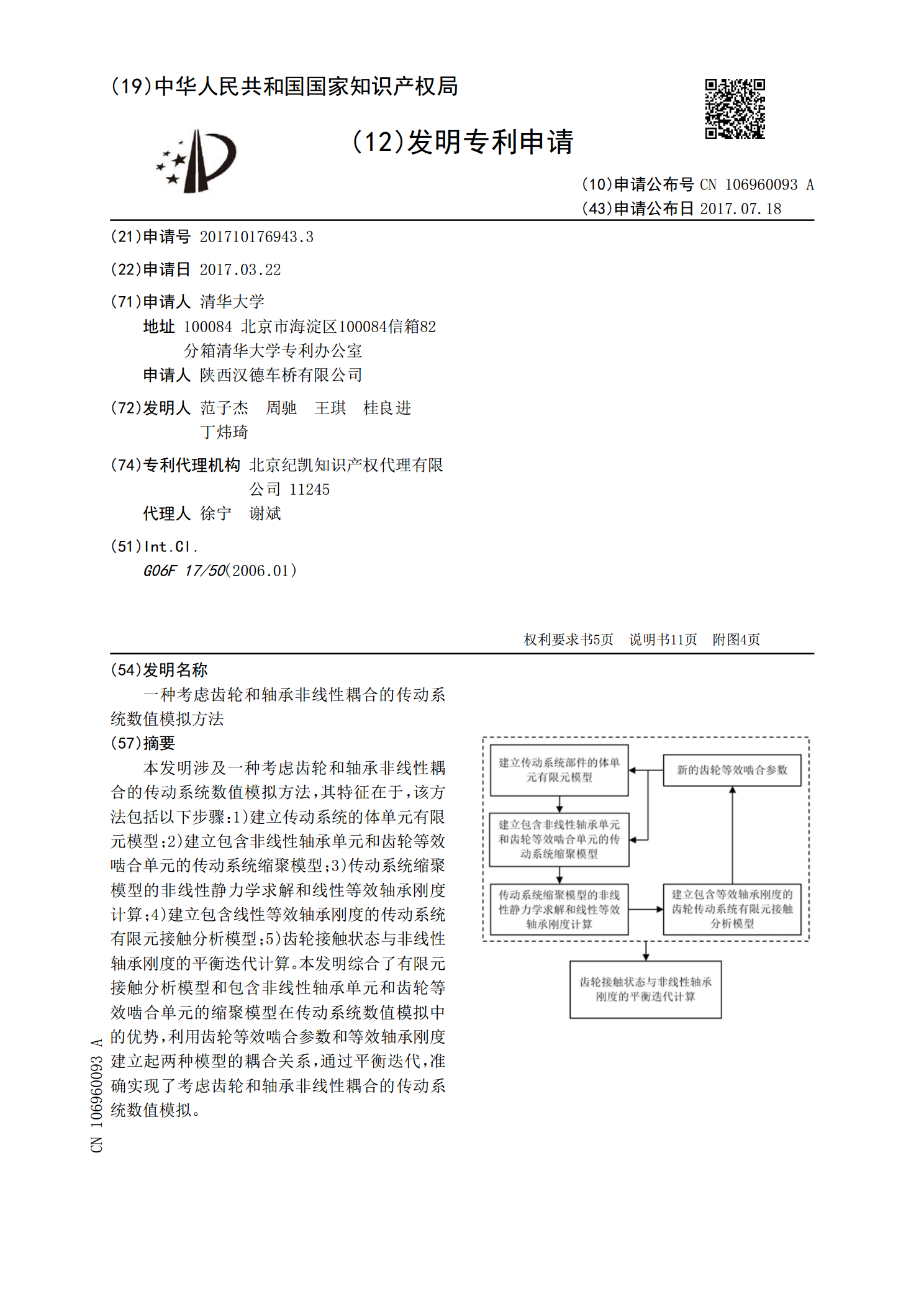
一种考虑齿轮和轴承非线性耦合的传动系统数值模拟方法.pdf
本发明涉及一种考虑齿轮和轴承非线性耦合的传动系统数值模拟方法,其特征在于,该方法包括以下步骤:1)建立传动系统的体单元有限元模型;2)建立包含非线性轴承单元和齿轮等效啮合单元的传动系统缩聚模型;3)传动系统缩聚模型的非线性静力学求解和线性等效轴承刚度计算;4)建立包含线性等效轴承刚度的传动系统有限元接触分析模型;5)齿轮接触状态与非线性轴承刚度的平衡迭代计算。本发明综合了有限元接触分析模型和包含非线性轴承单元和齿轮等效啮合单元的缩聚模型在传动系统数值模拟中的优势,利用齿轮等效啮合参数和等效轴承刚度建立起两

多轴承支撑轴系的精确变形计算研究.docx
多轴承支撑轴系的精确变形计算研究多轴承支撑轴系的精确变形计算研究摘要作为机械系统中重要的部件,轴系的精确变形计算对于机器的性能和寿命具有重要影响。本文针对多轴承支撑轴系的精确变形计算进行了研究,介绍了其工作原理和计算方法,分析了轴系变形的影响因素和计算误差,提出了相应的解决方法。研究结果表明,正确的轴系变形计算可以有效提高机械设备的性能和寿命,具有广阔的应用前景。关键词:轴系变形、多轴承支撑、计算方法、误差分析、解决方法引言轴系是机械传动系统中的重要组成部分,承担着传递动力和扭矩的任务。在机器运转过程中,