
转向装置以及用于控制转向装置的方法.pdf

子璇****君淑

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
转向装置以及用于控制转向装置的方法.pdf
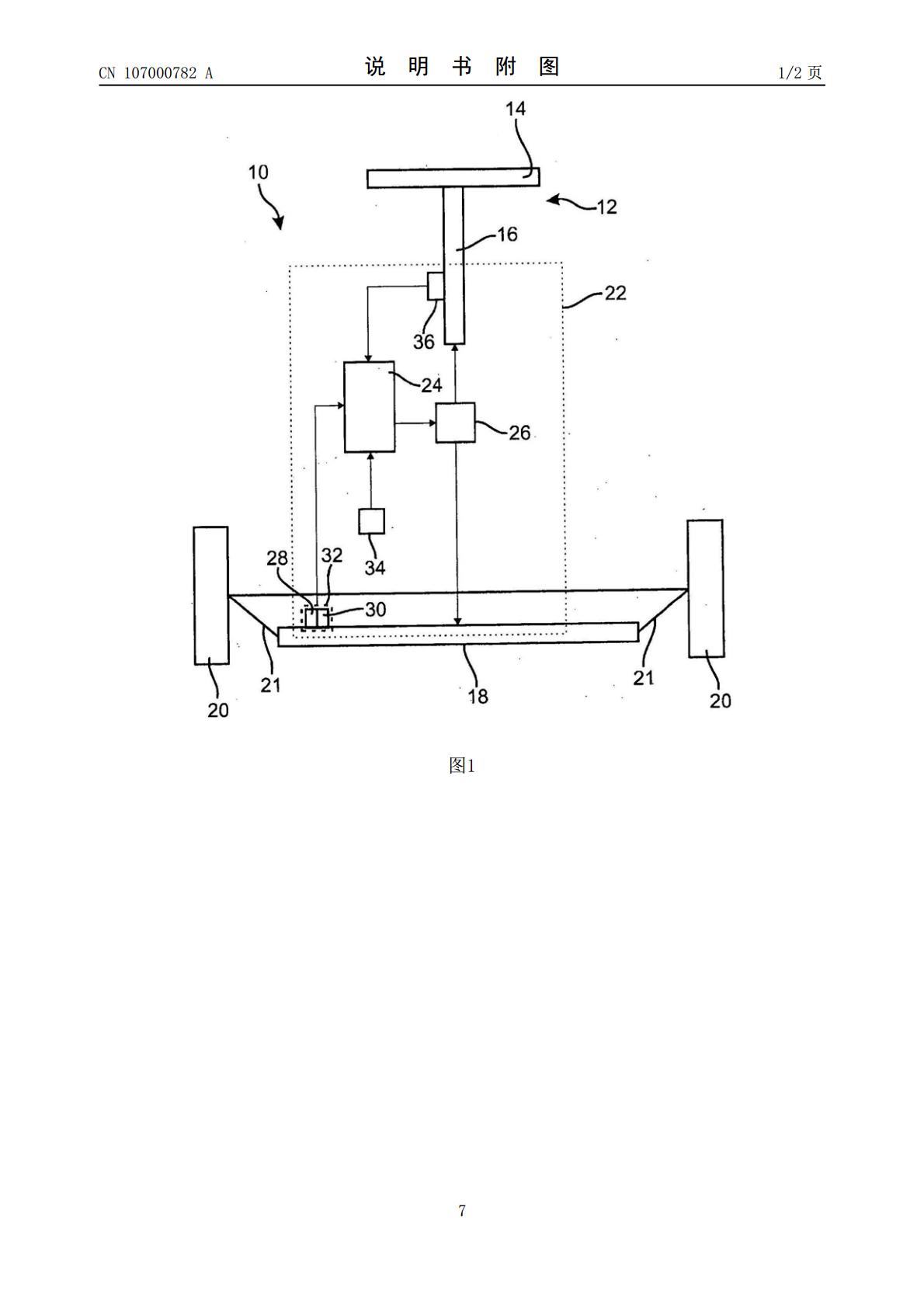
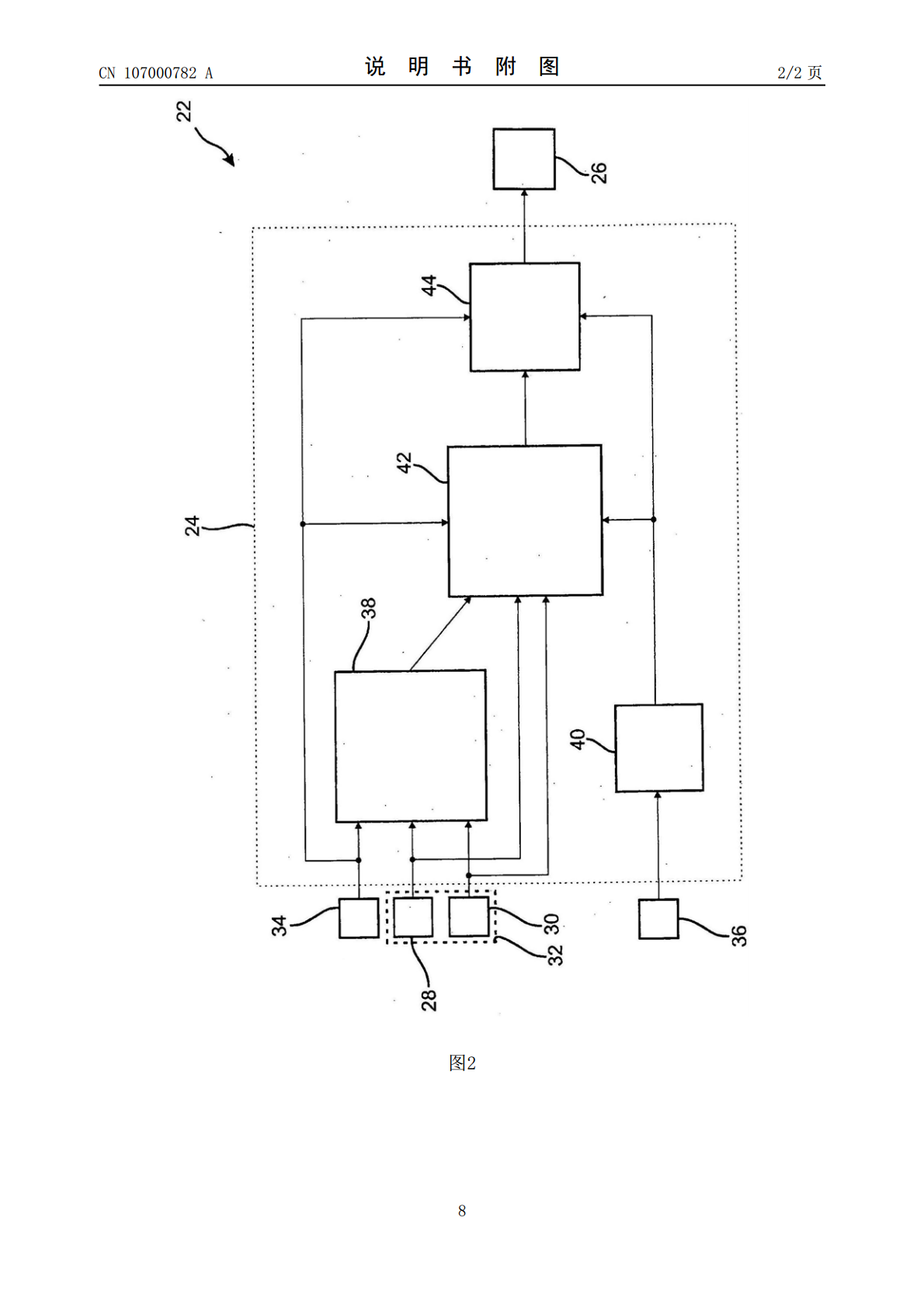
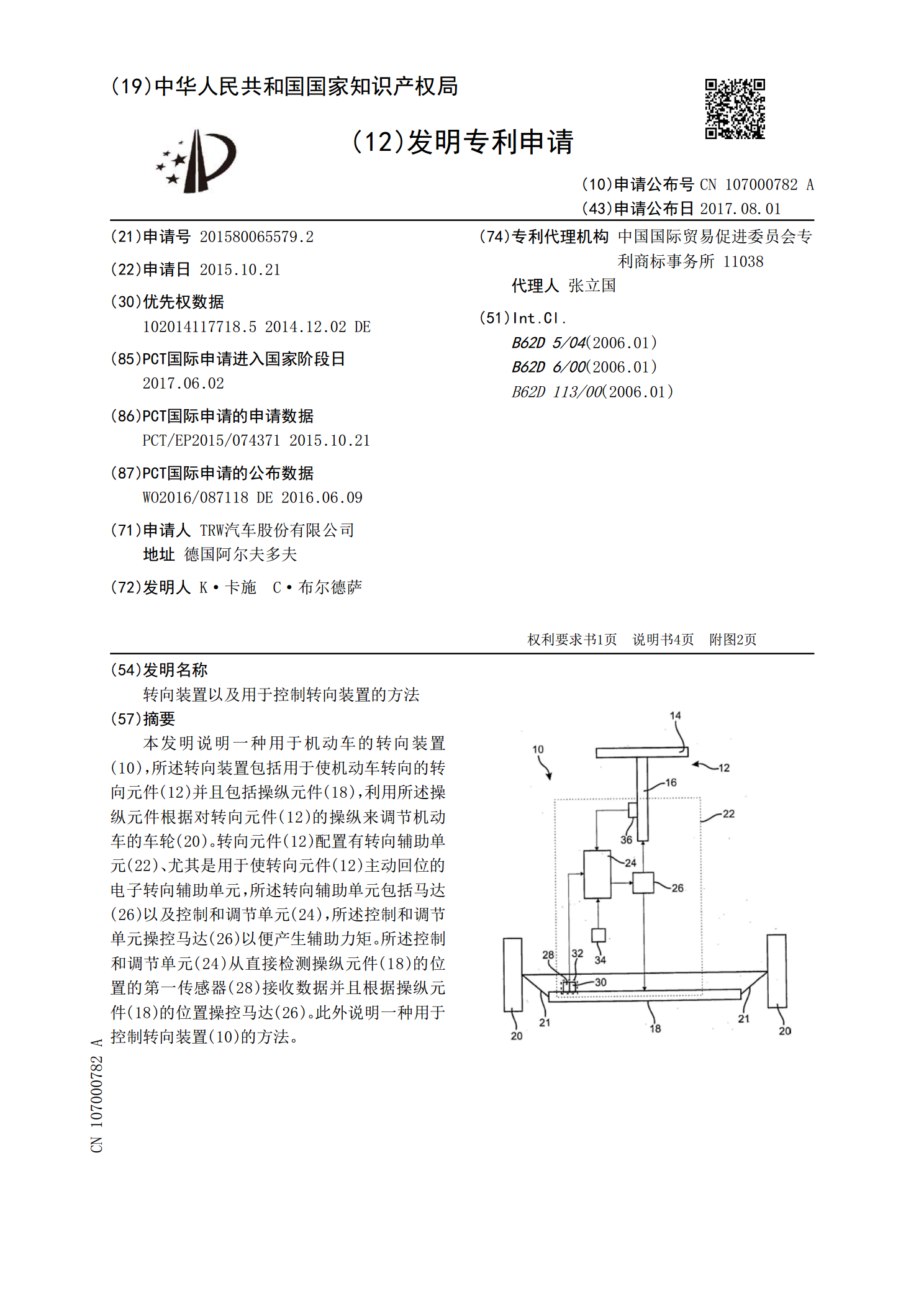
本发明说明一种用于机动车的转向装置(10),所述转向装置包括用于使机动车转向的转向元件(12)并且包括操纵元件(18),利用所述操纵元件根据对转向元件(12)的操纵来调节机动车的车轮(20)。转向元件(12)配置有转向辅助单元(22)、尤其是用于使转向元件(12)主动回位的电子转向辅助单元,所述转向辅助单元包括马达(26)以及控制和调节单元(24),所述控制和调节单元操控马达(26)以便产生辅助力矩。所述控制和调节单元(24)从直接检测操纵元件(18)的位置的第一传感器(28)接收数据并且根据操纵元件(1
动力转向装置的控制装置以及动力转向装置.pdf
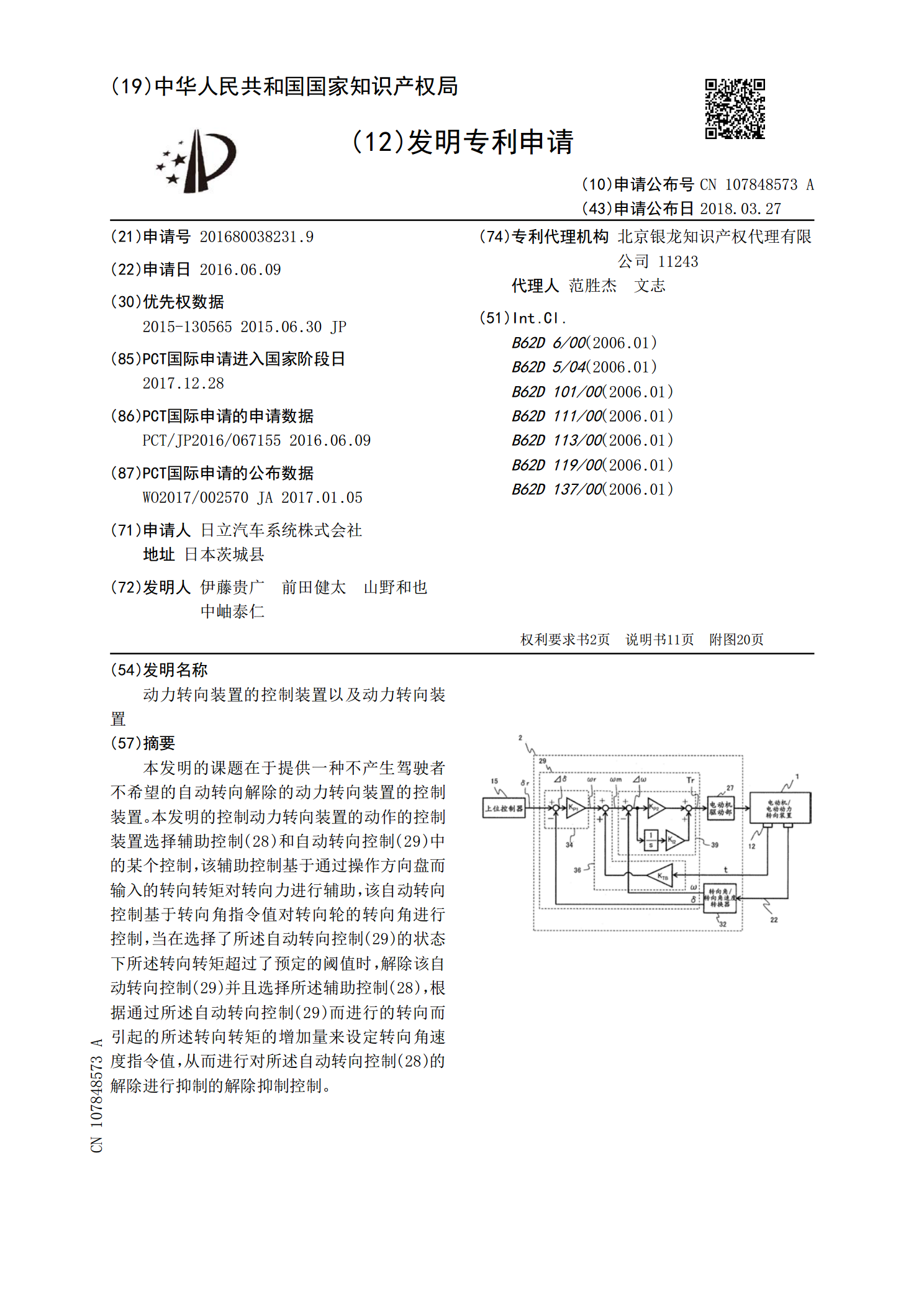
本发明的课题在于提供一种不产生驾驶者不希望的自动转向解除的动力转向装置的控制装置。本发明的控制动力转向装置的动作的控制装置选择辅助控制(28)和自动转向控制(29)中的某个控制,该辅助控制基于通过操作方向盘而输入的转向转矩对转向力进行辅助,该自动转向控制基于转向角指令值对转向轮的转向角进行控制,当在选择了所述自动转向控制(29)的状态下所述转向转矩超过了预定的阈值时,解除该自动转向控制(29)并且选择所述辅助控制(28),根据通过所述自动转向控制(29)而进行的转向而引起的所述转向转矩的增加量来设定转向角
动力转向装置以及动力转向装置的控制装置.pdf
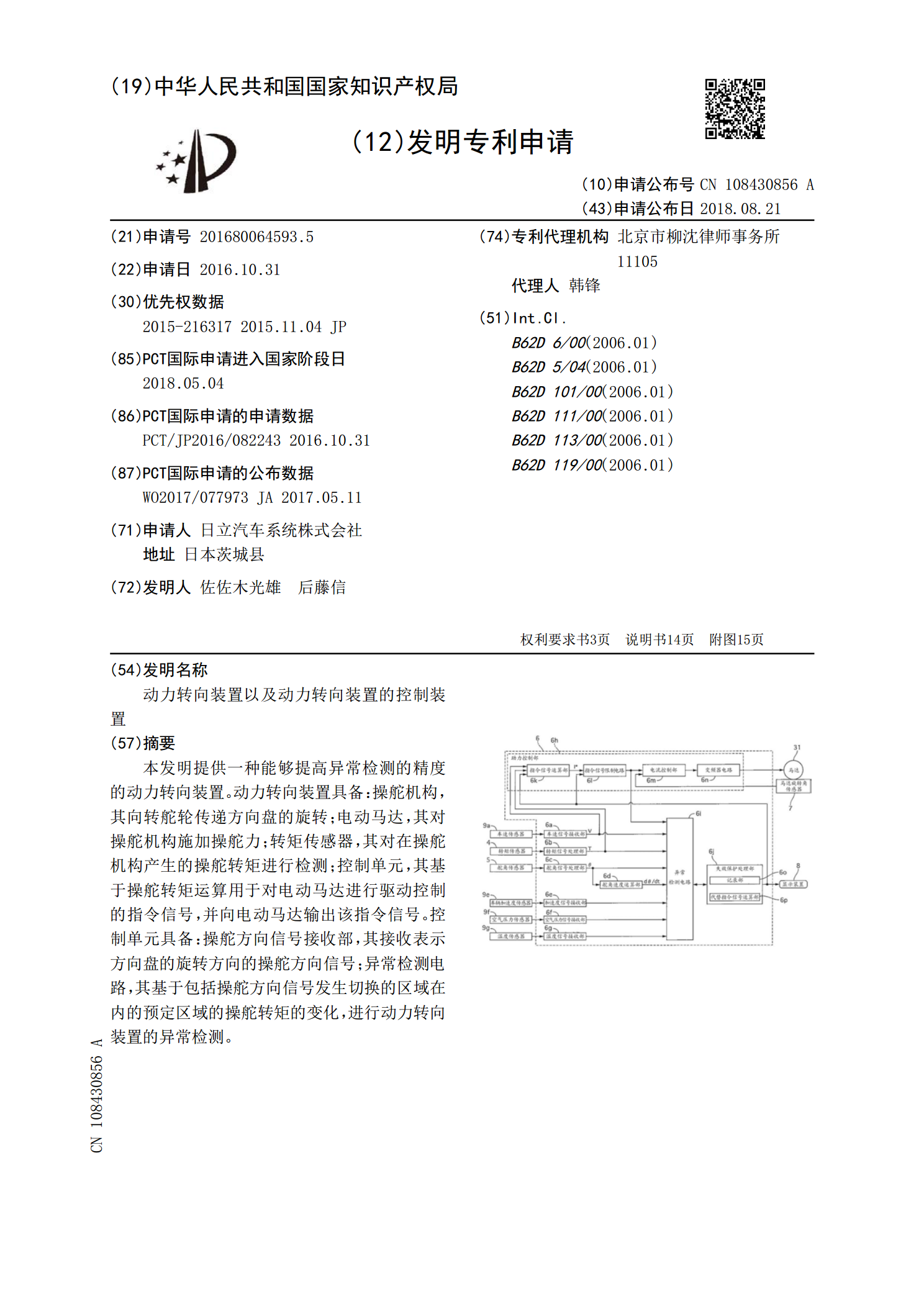
本发明提供一种能够提高异常检测的精度的动力转向装置。动力转向装置具备:操舵机构,其向转舵轮传递方向盘的旋转;电动马达,其对操舵机构施加操舵力;转矩传感器,其对在操舵机构产生的操舵转矩进行检测;控制单元,其基于操舵转矩运算用于对电动马达进行驱动控制的指令信号,并向电动马达输出该指令信号。控制单元具备:操舵方向信号接收部,其接收表示方向盘的旋转方向的操舵方向信号;异常检测电路,其基于包括操舵方向信号发生切换的区域在内的预定区域的操舵转矩的变化,进行动力转向装置的异常检测。

转向装置以及用于该转向装置的齿条轴.pdf
本发明涉及转向装置以及用于该转向装置的齿条轴,转向装置具备:小齿轮轴,其形成有小齿轮齿;齿条轴,其形成有与小齿轮齿啮合的齿条齿;以及一对限位器,它们在齿条轴的左右的行程终止位置限制齿条轴的移动。齿条齿以在转向操纵中立状态下与小齿轮齿啮合的部位为基准位置,并以该基准位置为中心将齿条轴的一端侧与另一端侧形成为非对称。关于齿条轴的行程位置而言,行程终止位置从基于小齿轮齿的啮合传动的齿条齿的齿根应力成为峰值的峰值产生行程位置偏移。
动力转向装置以及动力转向装置的控制装置.pdf
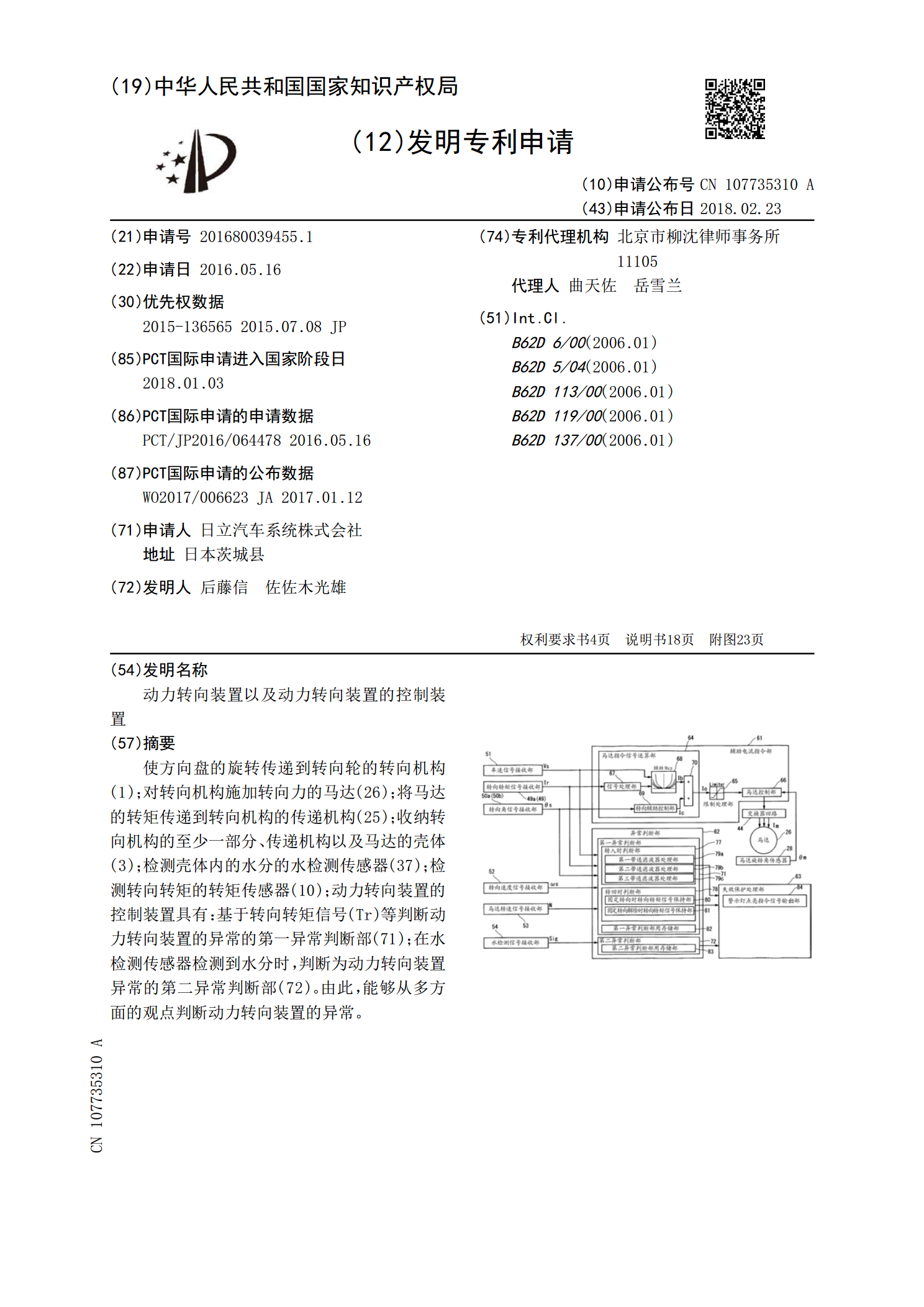
使方向盘的旋转传递到转向轮的转向机构(1);对转向机构施加转向力的马达(26);将马达的转矩传递到转向机构的传递机构(25);收纳转向机构的至少一部分、传递机构以及马达的壳体(3);检测壳体内的水分的水检测传感器(37);检测转向转矩的转矩传感器(10);动力转向装置的控制装置具有:基于转向转矩信号(Tr)等判断动力转向装置的异常的第一异常判断部(71);在水检测传感器检测到水分时,判断为动力转向装置异常的第二异常判断部(72)。由此,能够从多方面的观点判断动力转向装置的异常。