
一种半潜式双体无人艇.pdf

茂学****23


1/9

2/9

3/9

4/9

5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种半潜式双体无人艇.pdf
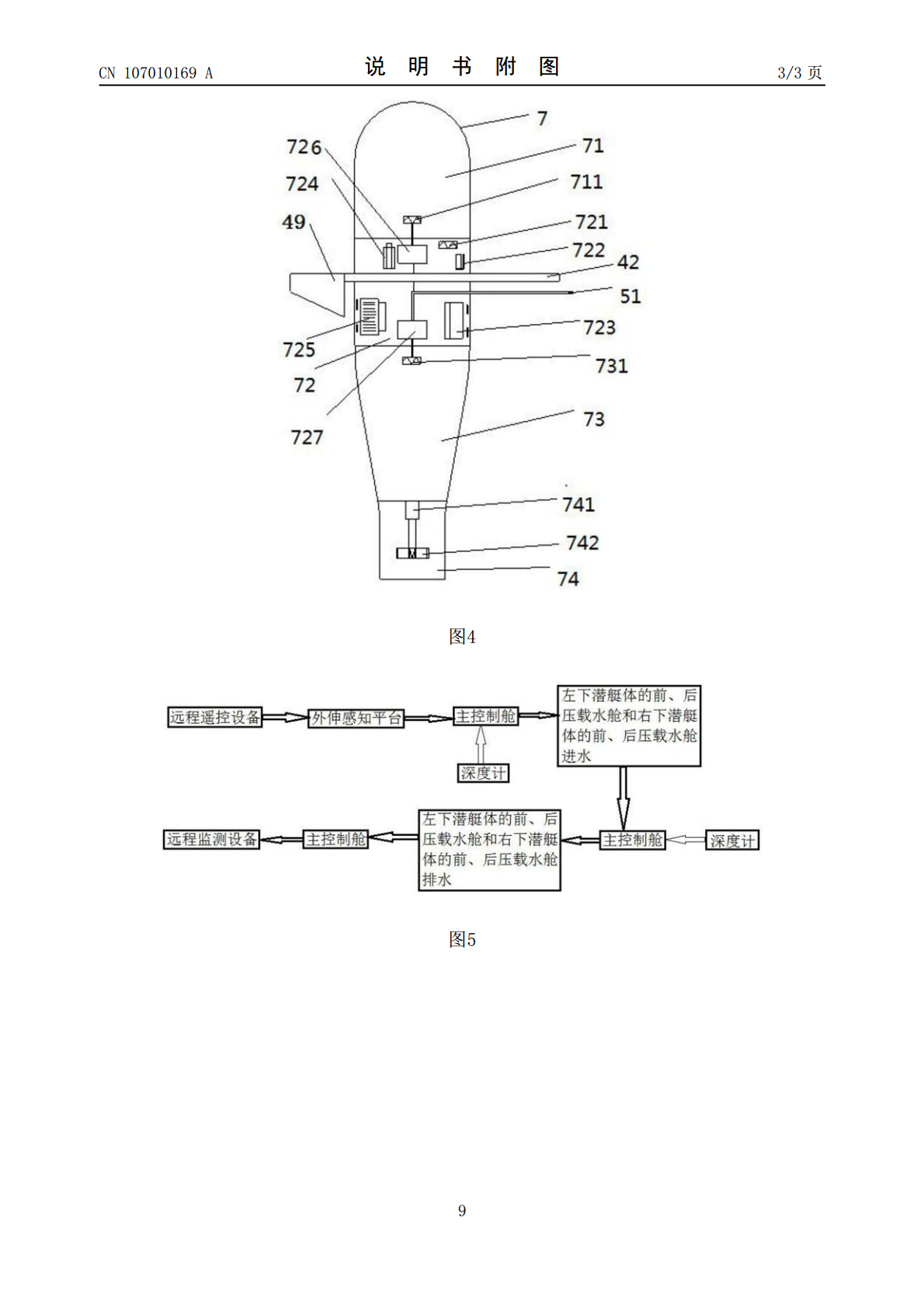
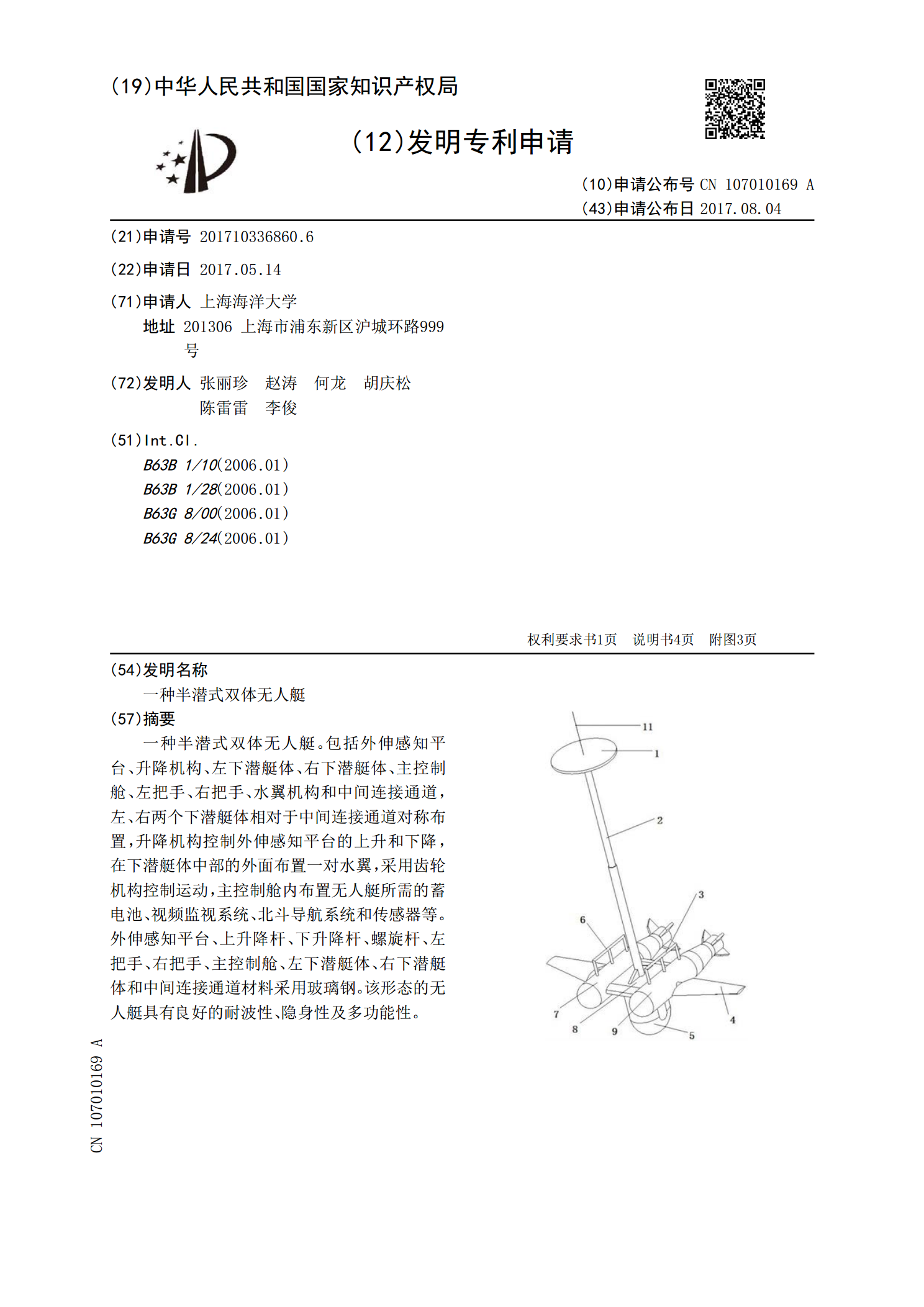
一种半潜式双体无人艇。包括外伸感知平台、升降机构、左下潜艇体、右下潜艇体、主控制舱、左把手、右把手、水翼机构和中间连接通道,左、右两个下潜艇体相对于中间连接通道对称布置,升降机构控制外伸感知平台的上升和下降,在下潜艇体中部的外面布置一对水翼,采用齿轮机构控制运动,主控制舱内布置无人艇所需的蓄电池、视频监视系统、北斗导航系统和传感器等。外伸感知平台、上升降杆、下升降杆、螺旋杆、左把手、右把手、主控制舱、左下潜艇体、右下潜艇体和中间连接通道材料采用玻璃钢。该形态的无人艇具有良好的耐波性、隐身性及多功能性。
基于重力变化半潜式巡航无人艇及半潜方法.pdf
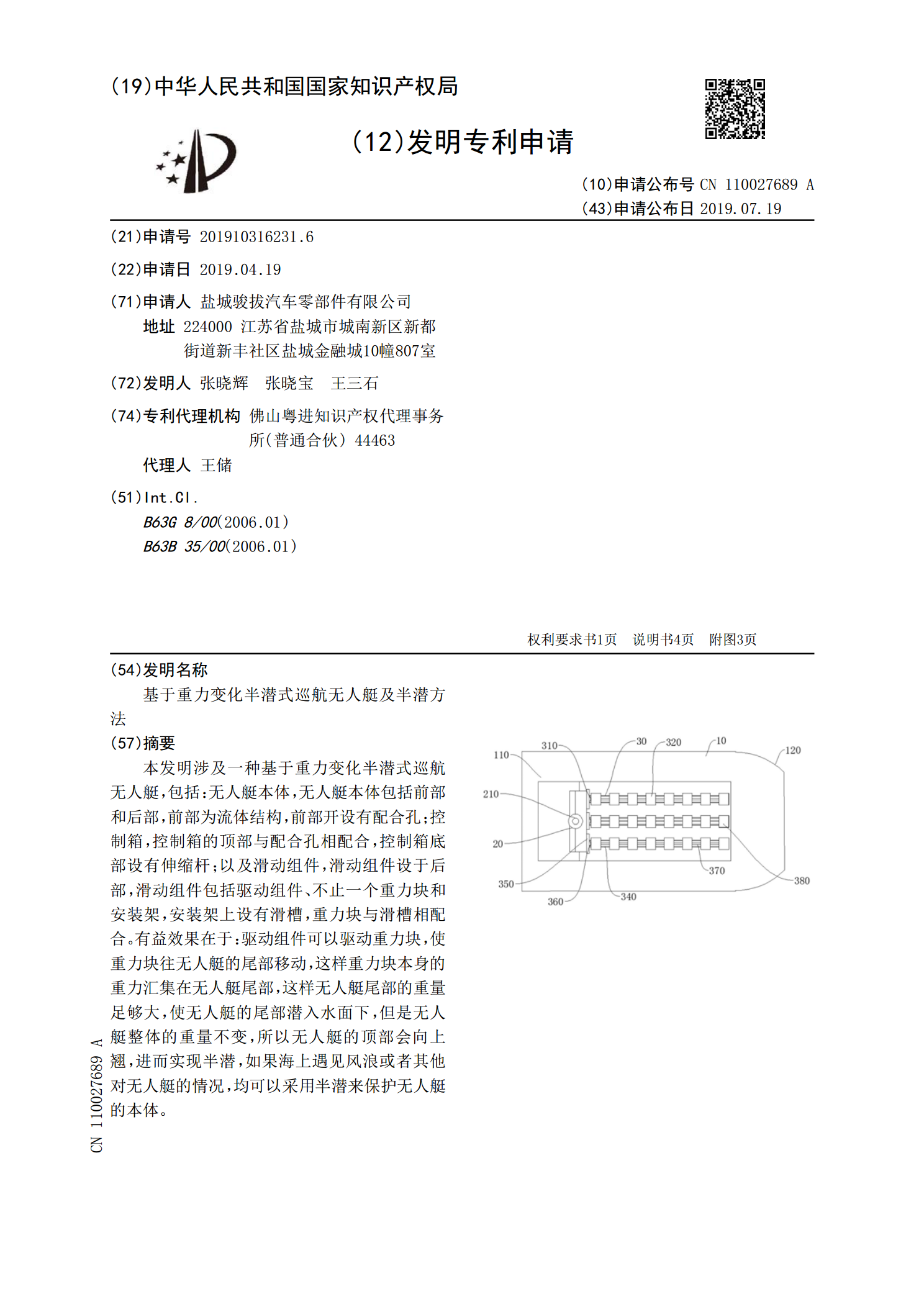
本发明涉及一种基于重力变化半潜式巡航无人艇,包括:无人艇本体,无人艇本体包括前部和后部,前部为流体结构,前部开设有配合孔;控制箱,控制箱的顶部与配合孔相配合,控制箱底部设有伸缩杆;以及滑动组件,滑动组件设于后部,滑动组件包括驱动组件、不止一个重力块和安装架,安装架上设有滑槽,重力块与滑槽相配合。有益效果在于:驱动组件可以驱动重力块,使重力块往无人艇的尾部移动,这样重力块本身的重力汇集在无人艇尾部,这样无人艇尾部的重量足够大,使无人艇的尾部潜入水面下,但是无人艇整体的重量不变,所以无人艇的顶部会向上翘,进而
一种半潜无人艇动力推进装置.pdf
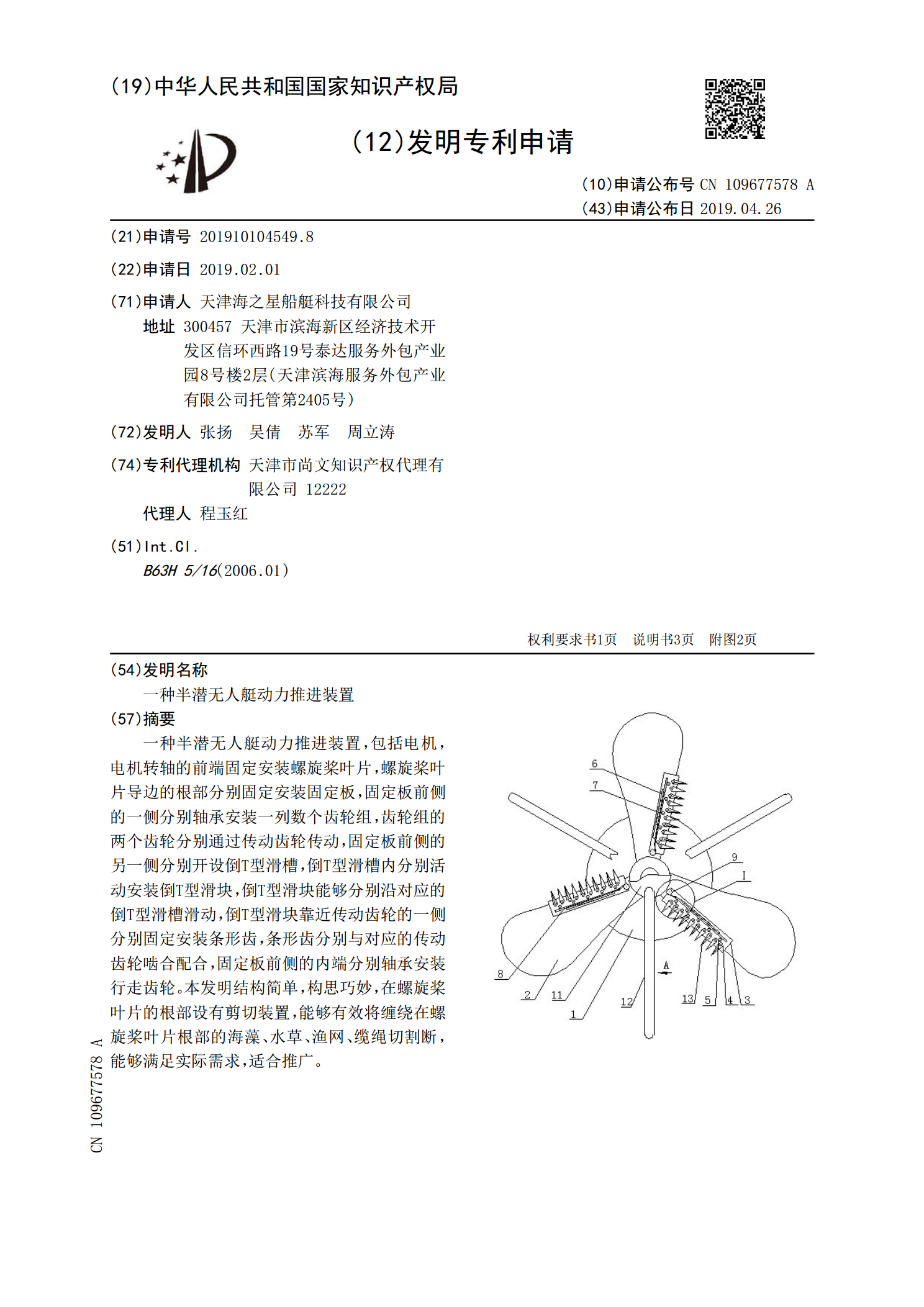
一种半潜无人艇动力推进装置,包括电机,电机转轴的前端固定安装螺旋桨叶片,螺旋桨叶片导边的根部分别固定安装固定板,固定板前侧的一侧分别轴承安装一列数个齿轮组,齿轮组的两个齿轮分别通过传动齿轮传动,固定板前侧的另一侧分别开设倒T型滑槽,倒T型滑槽内分别活动安装倒T型滑块,倒T型滑块能够分别沿对应的倒T型滑槽滑动,倒T型滑块靠近传动齿轮的一侧分别固定安装条形齿,条形齿分别与对应的传动齿轮啮合配合,固定板前侧的内端分别轴承安装行走齿轮。本发明结构简单,构思巧妙,在螺旋桨叶片的根部设有剪切装置,能够有效将缠绕在螺旋

一种半潜式水下旅游观光艇.pdf
本发明公开了一种半潜式水下旅游观光艇,包括安装架,所述安装架的两侧固定安装浮体,所述安装架的后端固定安装设备仓,所述设备仓的两侧与浮体固定安装,且浮体和设备仓的上端表面外围设置护栏杆,所述浮体的后端下部设置推进器,所述推进器通过船载控制系统与锂电池连接,所述锂电池固定放置在设备仓内部,所述安装架中间位置设置圆形安装孔,所述安装架的圆形安装孔内部配合安装观察仓,所述安装仓为透明的圆筒形结构,本半潜式水下旅游观光艇在浮体下方设置可旋转的观察仓,能够相对与浮体自由旋转,且在观察仓后方设置涡轮泵作为动力设备,能够

双尾半潜无人艇近水面运动水动力特性研究的开题报告.docx
双尾半潜无人艇近水面运动水动力特性研究的开题报告一、研究背景随着社会经济的发展和科技水平的提高,对深海科学研究的需求愈发迫切,而深海海洋环境的极端恶劣和不可预测性使得人类的探测方式受到了限制。因此,无人艇成为了深海探测的重要手段。在这其中,双尾半潜无人艇以其良好的隐蔽性和海洋适应性成为了广泛关注的研究重点。在水动力学领域,水动力特性研究是深入探索双尾半潜无人艇运动规律的关键之一。本文旨在对双尾半潜无人艇在近水面运动中的水动力特性进行研究。二、研究内容将双尾半潜无人艇的结构、造型等参数进行建模,在数值计算软