
一种超轻智能轮椅车.pdf

努力****绮亦


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种超轻智能轮椅车.pdf
本发明公开了一种超轻智能轮椅车,其结构包括辅助车轮、连接杆、万向轴、主车轮、驱动箱、踩踏板、承接杆、座椅、承接杆、扶把、控制箱、控制柄、按摩装置,本发明一种超轻智能轮椅车,结构上设有按摩装置,通过控制箱上的控制柄来控制电控线通电,通电后按摩装置各个部位都会启动,身子躺下去时,传感器会立即感应到,然后会将数据通过数据传输线传递到控制器上,控制器根据传递过来的信息来控制马达转动速度,马达带动着螺纹杆进行转动,接着螺纹杆会让传动齿轮带动传动杆进行传动,当在座椅上坐久时,其按摩装置将对其背部进行按摩,使其在座椅上

一种超轻智能轮椅车.pdf
本发明公开了一种超轻智能轮椅车,其结构包括控制器、座椅、可调节扶手、主机体、滚轮支架、后部滚轮、动力轮、电动机箱、减震弹簧、踏板滚轮、脚踏板、上部支架,控制器固定在座椅上,座椅的右边通过螺丝固定有可调节扶手,座椅的下部和主机体连接,主机体的后部和滚轮支架通过螺丝固定,滚轮支架通过轴承和后部滚轮固定,主机体的两侧均设有动力轮,动力轮和电动机箱通过轴连接,电动机箱的前部设有减震弹簧,电动机箱的前部设有脚踏板,通过设有控制器,可以使使用者高效的对设备进行控制,不需要别人的帮助,即可完成行走、停止等活动,有效的提

一种智能载运轮椅车.pdf
本发明涉及一种智能载运轮椅车,包括:车架;座椅,设置在所述车架上供用户乘坐和/或物品放置;行走机构,设置在所述车架上;驱动机构,设置在所述车架上,且与所述行走机构连接,以驱动所述行走机构行走;控制电路,设置在所述车架上,且与所述驱动机构连接;激光雷达,设置在所述车架前端,且与所述控制电路连接,以构建地图并给所述行走机构导航。该智能载运轮椅车通过在车架上设置与控制电路连接的驱动机构和激光雷达以及与驱动机构连接的行走机构,从而可将物品或者用户载运至设定的地点,进而可缩短物品或者用户到达目的地的时间,给用户带来

智能轮椅车.pdf
本发明公开一种智能轮椅车,包括底座以及位于底座之上的座椅,所述底座上安装有动力装置和传感器,底座下方两侧各设有一个驱动轮,底座下方前后各设有一个万向轮,座椅和底座之间设有传动齿轮组,传动齿轮组连接动力装置,座椅和底座能可控的分离与组合。本发明通过采用各种传感器,并将座椅和底座相对独立涉及,使轮椅具有人性化的智能科技,能够使使用者获得方便,同时也降低因为操作不便引发的危险,保护人们的生命安全。
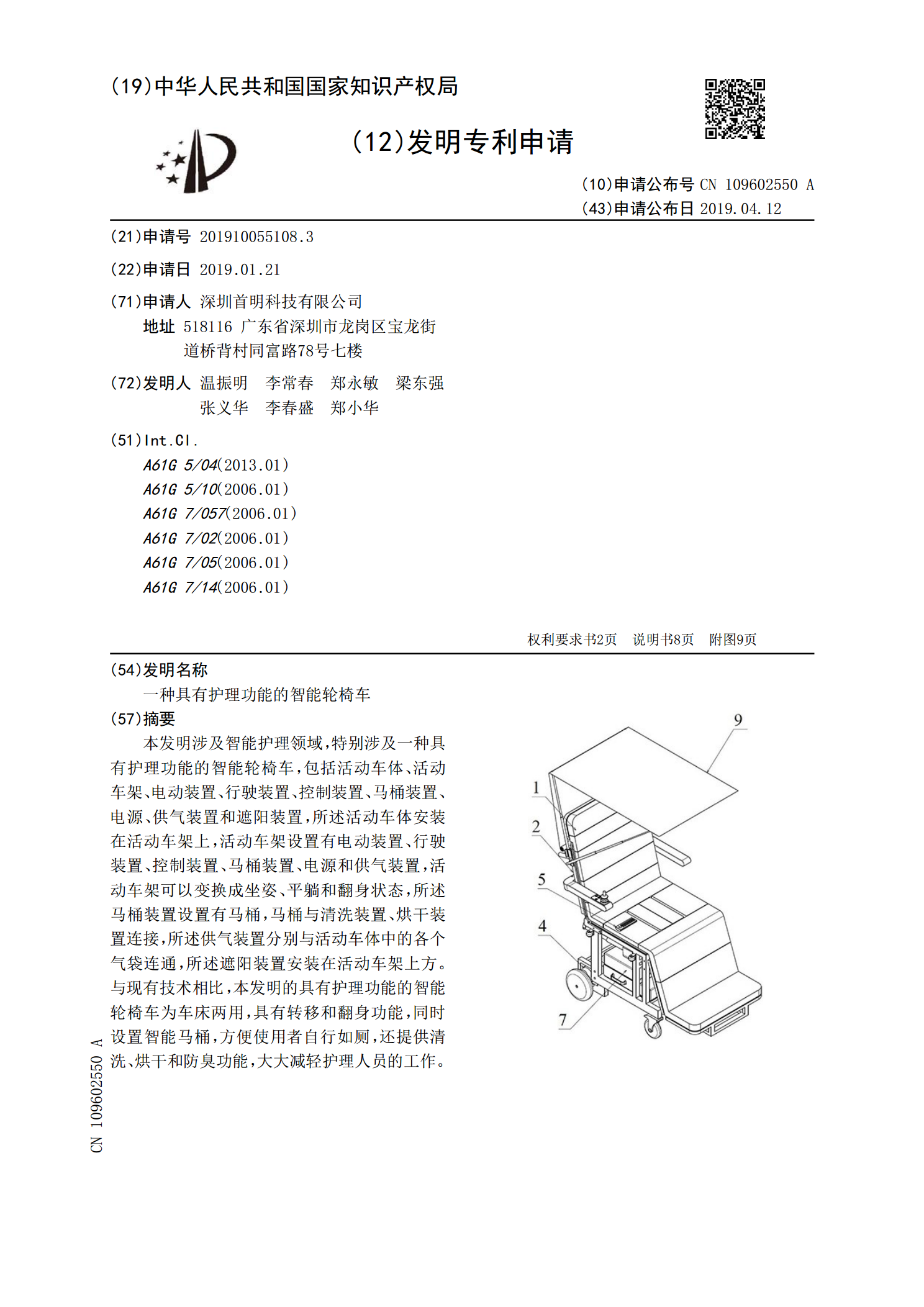
一种具有护理功能的智能轮椅车.pdf
本发明涉及智能护理领域,特别涉及一种具有护理功能的智能轮椅车,包括活动车体、活动车架、电动装置、行驶装置、控制装置、马桶装置、电源、供气装置和遮阳装置,所述活动车体安装在活动车架上,活动车架设置有电动装置、行驶装置、控制装置、马桶装置、电源和供气装置,活动车架可以变换成坐姿、平躺和翻身状态,所述马桶装置设置有马桶,马桶与清洗装置、烘干装置连接,所述供气装置分别与活动车体中的各个气袋连通,所述遮阳装置安装在活动车架上方。与现有技术相比,本发明的具有护理功能的智能轮椅车为车床两用,具有转移和翻身功能,同时设置