
球形机器人.pdf

新月****姐a

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
球形机器人.pdf
本发明提供了一种球形机器人,包括球形壳体、位于所述球形壳体内的第一驱动件、传动杆及至少一组飞轮组件。所述第一驱动件用于驱动所述传动杆绕所述轴心转动,以带动所述球形壳体转动。所述飞轮组件包括第一飞轮和第二飞轮。所述球形机器人受到干扰力矩时,通过控制所述第一飞轮和所述第二飞轮反向同步偏摆来输出进动力矩,以克服所述干扰力矩。由于所述第一飞轮的偏摆轴和所述第二飞轮的偏摆轴均垂直于所述连杆及所述轴心,这样的布局方式使得所述第一飞轮和所述第二飞轮的飞轮半径极大地增加,这样可以增加飞轮的转动惯量,从而增加飞轮组件的进动
球形机器人.pdf
本发明公布了一种球形机器人,所述球形机器人包括头部和球体,所述球体包括球壳及位于所述球壳内的底盘、直杆及盾,所述底盘接触所述球壳内壁,所述直杆固定连接于所述底盘与所述盾之间,所述头部包括基座、托盘支架、功能器件及传动齿轮组,所述基座磁性连接所述球体,所述传动齿轮组安装于所述基座上,所述托盘支架位于所述基座上并通过所述传动齿轮组与所述基座转动连接,所述功能器件固定于所述托盘支架上,所述功能器件用于识别工作环境,所述传动齿轮组驱动所述托盘支架及所述功能器件相对所述基座转动。球形机器人的智能化高,能够满足多种使
球形机器人.pdf
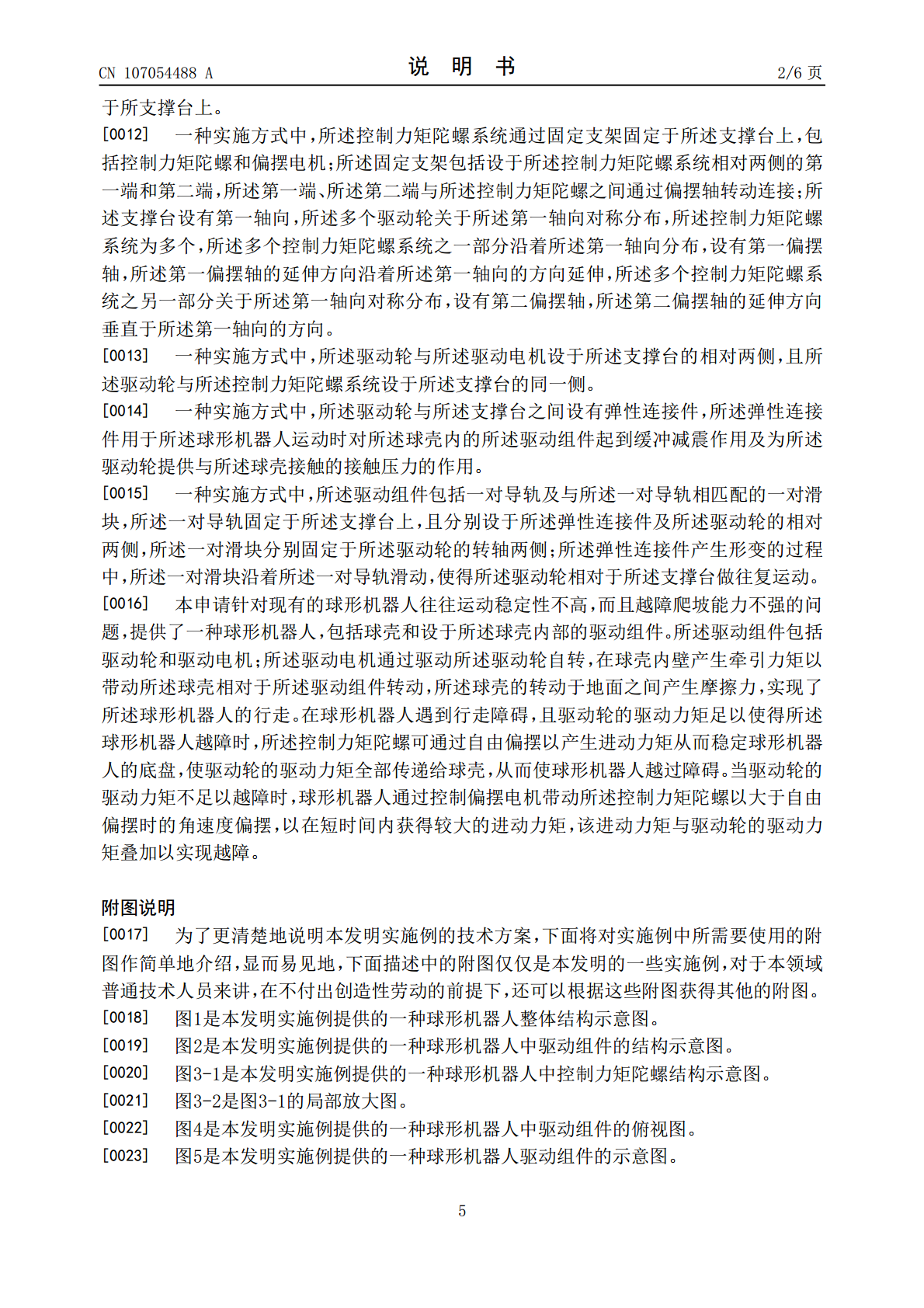
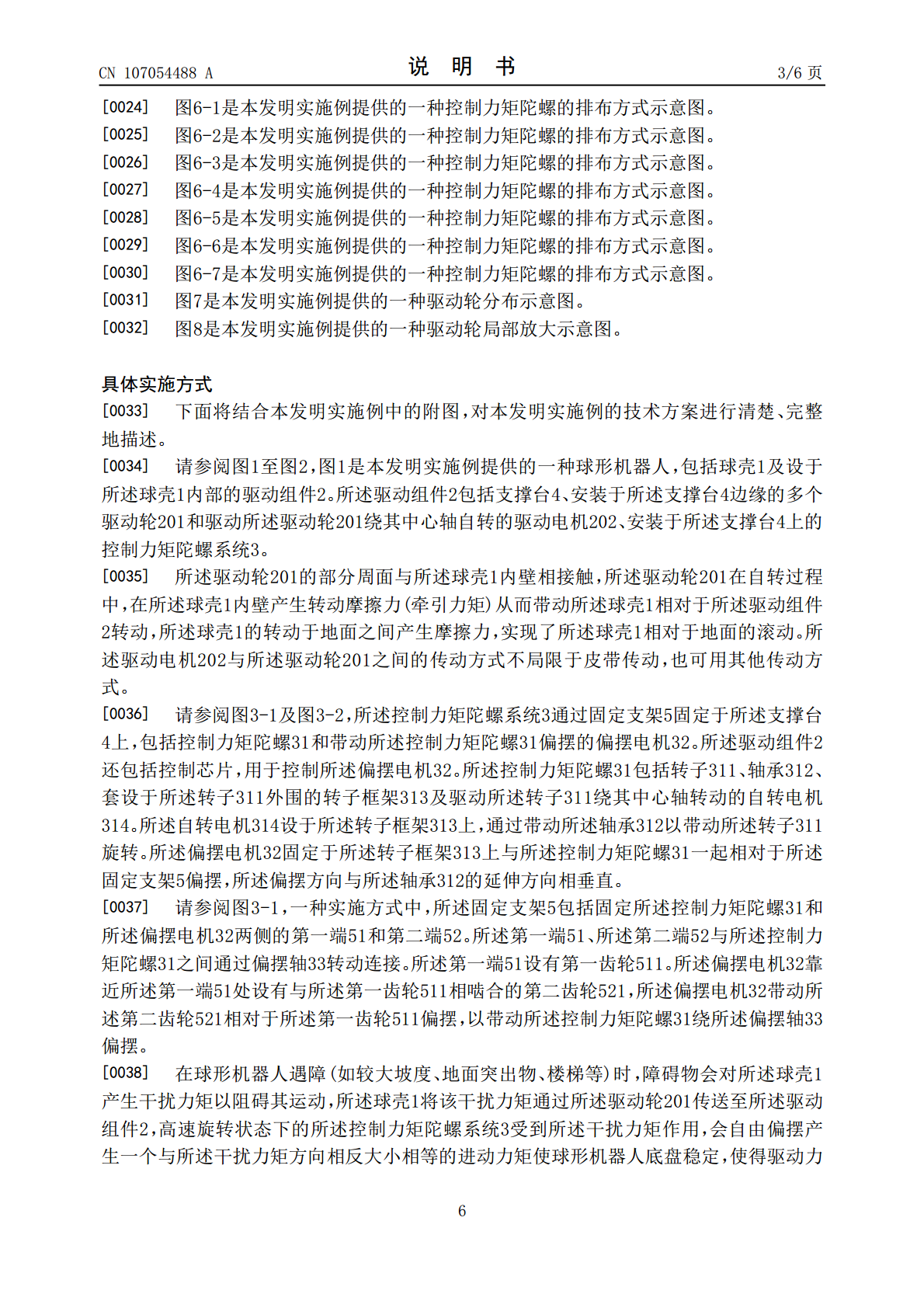
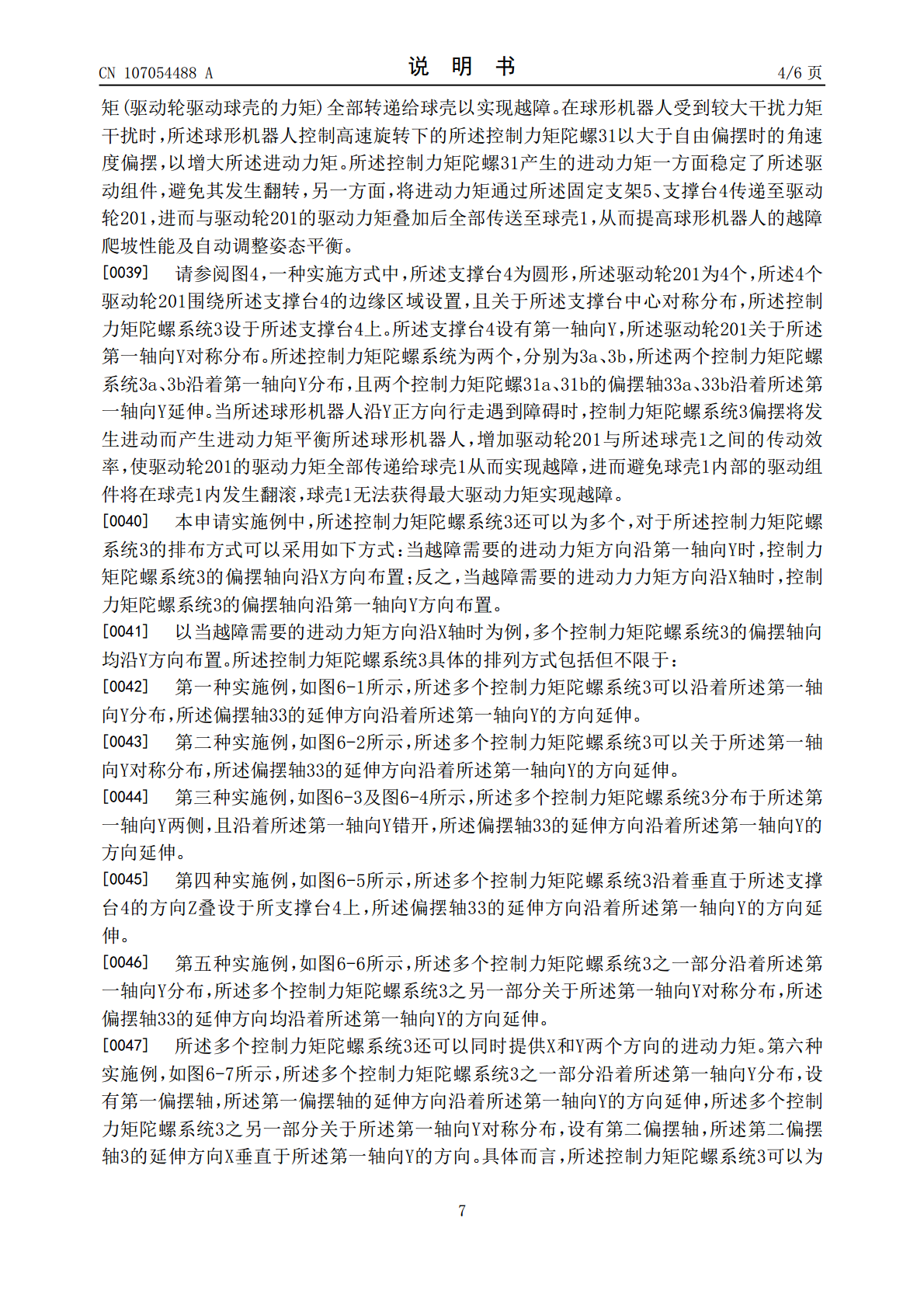
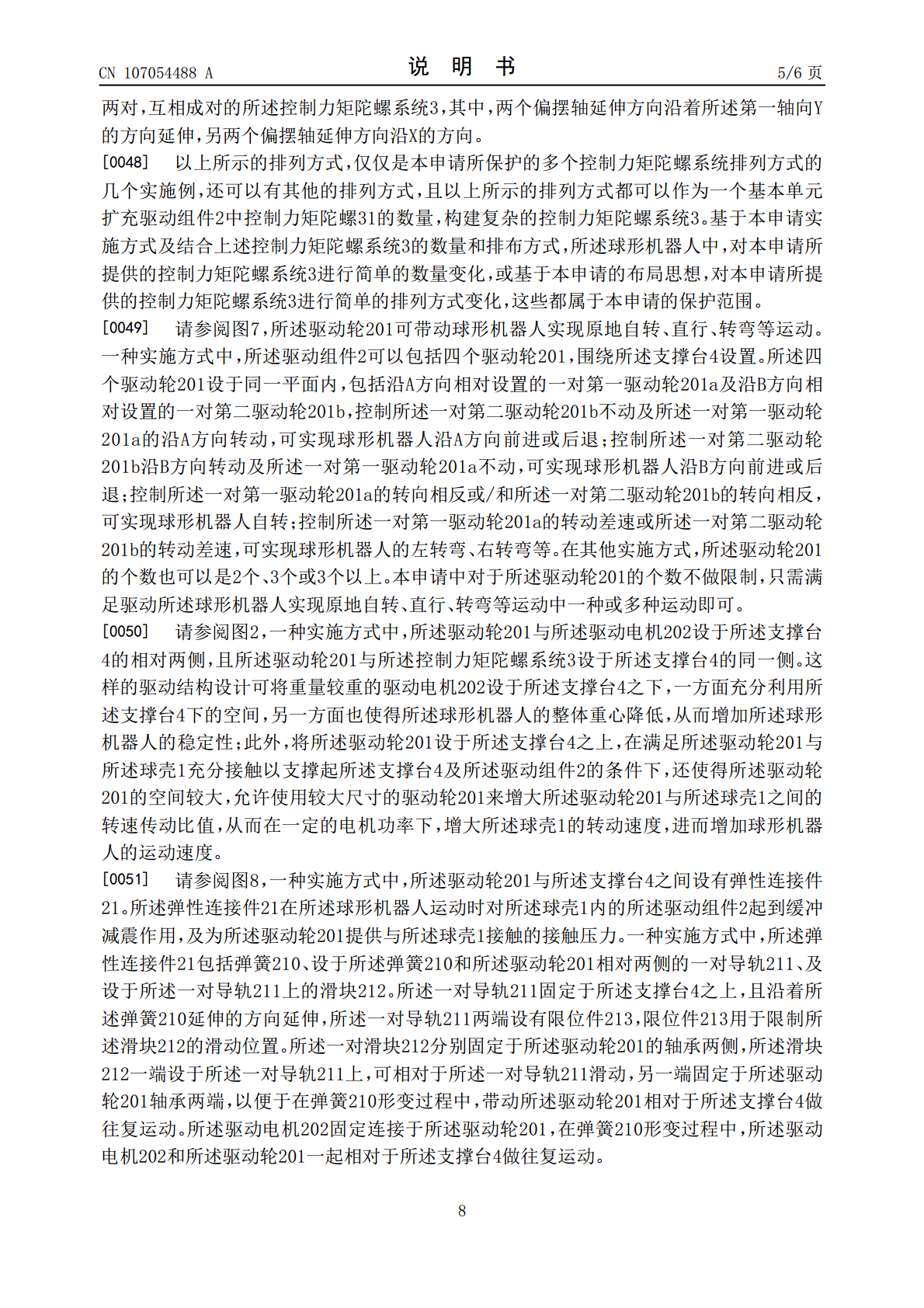
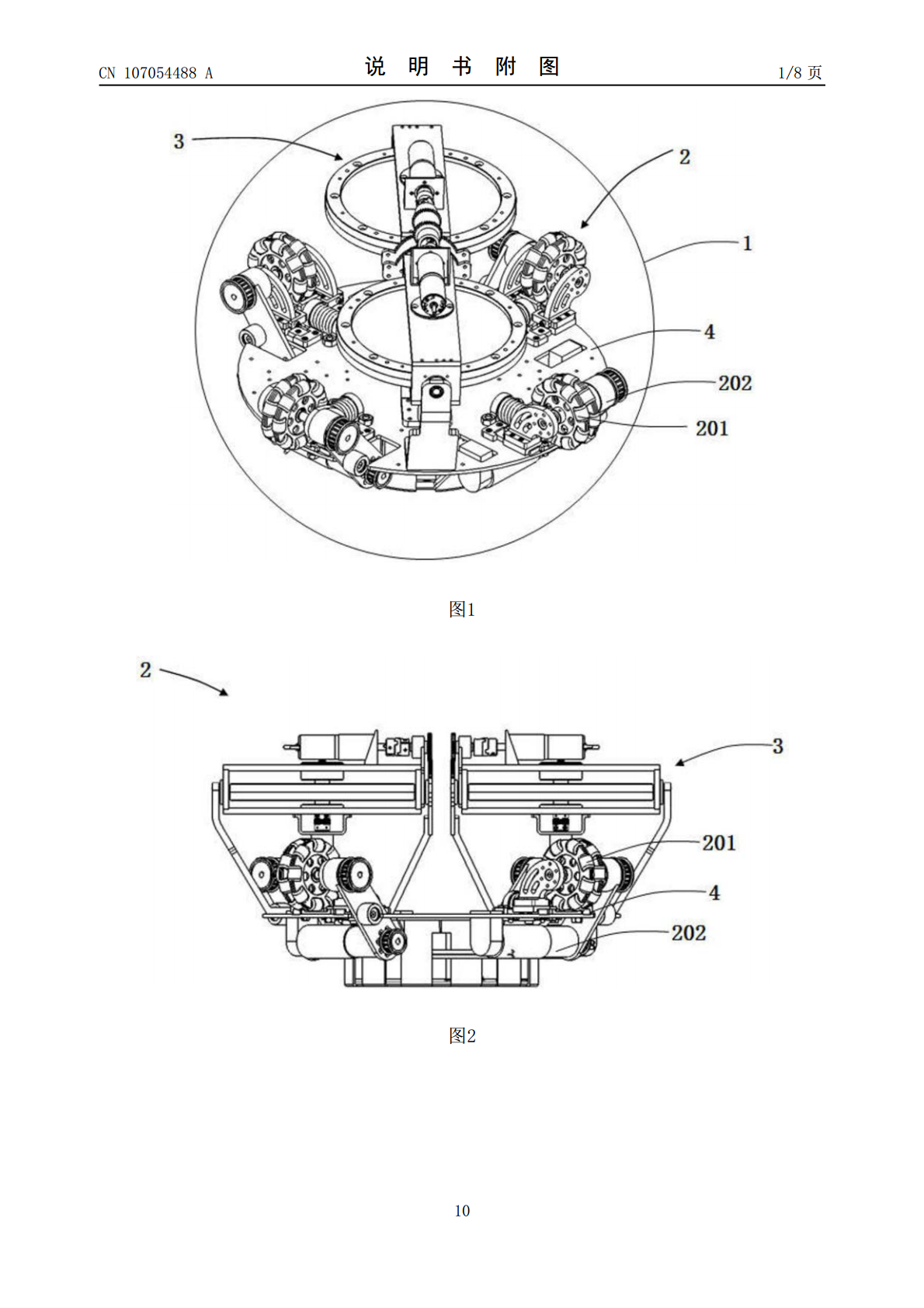
本发明提供了一种球形机器人,包括球壳及设于所述球壳内部的驱动组件;所述驱动组件包括支撑台、安装于所述支撑台的多个驱动轮、驱动电机及控制力矩陀螺系统。所述多个驱动轮分布于所述支撑台的边缘且与所述球壳内壁接触,所述驱动电机驱动所述驱动轮转动,使所述驱动轮和所述球壳之间产生摩擦力以带动所述球形机器人行走;所述球壳受到干扰力矩时,通过控制所述控制力矩陀螺系统偏摆来增加进动力矩以克服所述干扰力矩及提高所述球形机器人的稳定性。本发明提高了球形机器人的越障爬坡能力,增加运动稳定性和实现在遇障时的自动调整姿态。
球形机器人.pdf
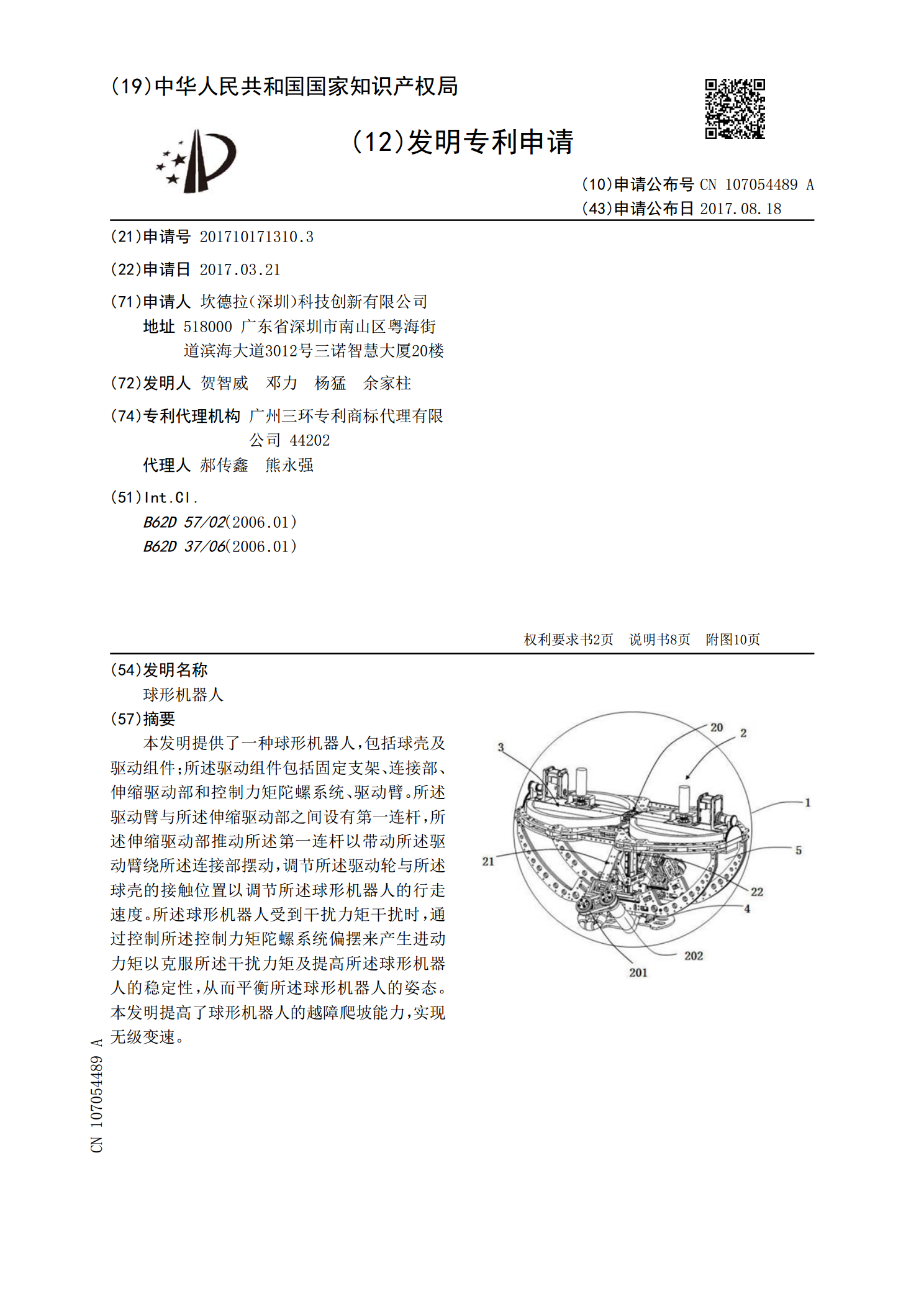
本发明提供了一种球形机器人,包括球壳及驱动组件;所述驱动组件包括固定支架、连接部、伸缩驱动部和控制力矩陀螺系统、驱动臂。所述驱动臂与所述伸缩驱动部之间设有第一连杆,所述伸缩驱动部推动所述第一连杆以带动所述驱动臂绕所述连接部摆动,调节所述驱动轮与所述球壳的接触位置以调节所述球形机器人的行走速度。所述球形机器人受到干扰力矩干扰时,通过控制所述控制力矩陀螺系统偏摆来产生进动力矩以克服所述干扰力矩及提高所述球形机器人的稳定性,从而平衡所述球形机器人的姿态。本发明提高了球形机器人的越障爬坡能力,实现无级变速。
球形机器人.pdf
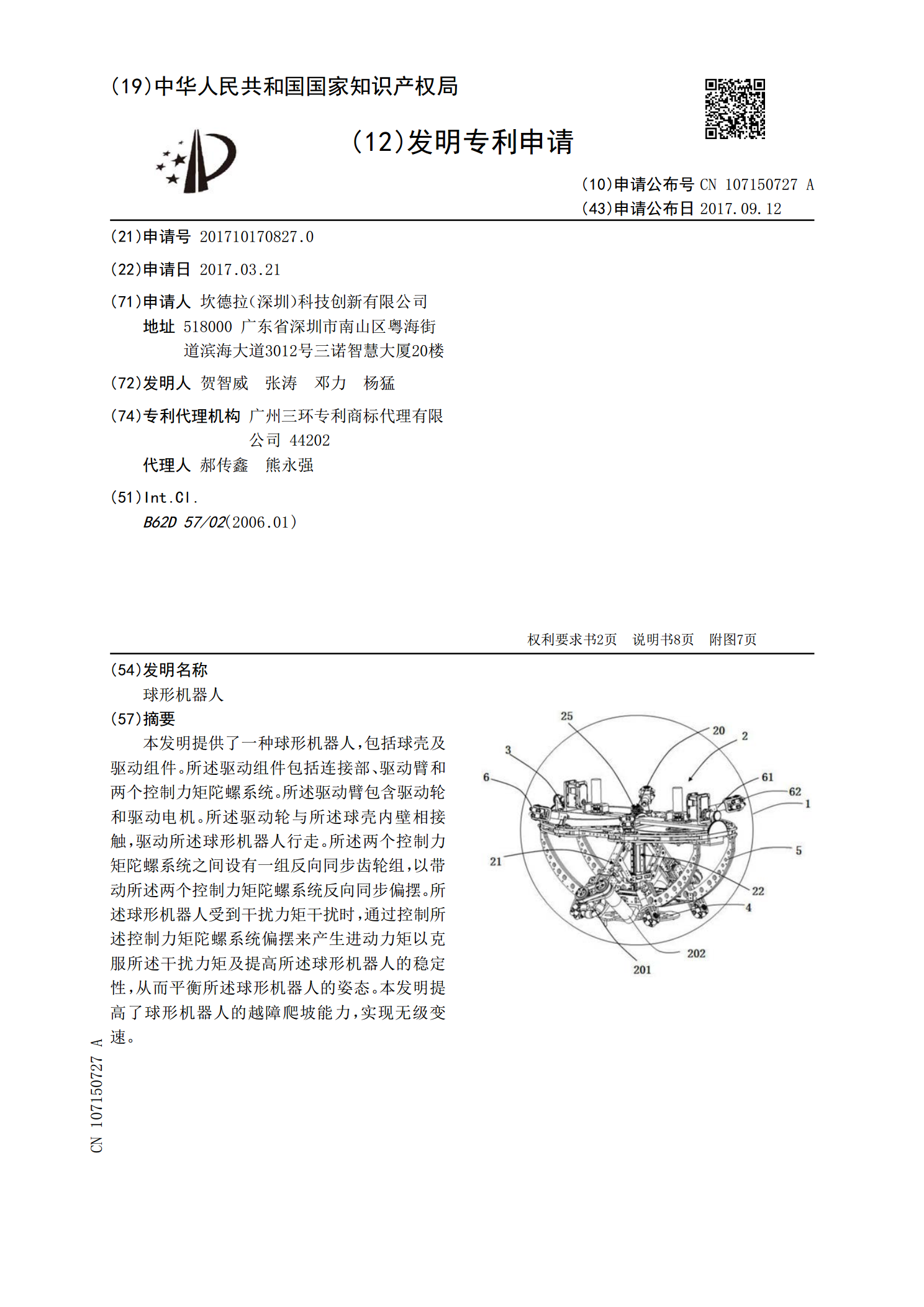
本发明提供了一种球形机器人,包括球壳及驱动组件。所述驱动组件包括连接部、驱动臂和两个控制力矩陀螺系统。所述驱动臂包含驱动轮和驱动电机。所述驱动轮与所述球壳内壁相接触,驱动所述球形机器人行走。所述两个控制力矩陀螺系统之间设有一组反向同步齿轮组,以带动所述两个控制力矩陀螺系统反向同步偏摆。所述球形机器人受到干扰力矩干扰时,通过控制所述控制力矩陀螺系统偏摆来产生进动力矩以克服所述干扰力矩及提高所述球形机器人的稳定性,从而平衡所述球形机器人的姿态。本发明提高了球形机器人的越障爬坡能力,实现无级变速。