
一种柔性自动打磨砂带机.pdf

子安****吖吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种柔性自动打磨砂带机.pdf
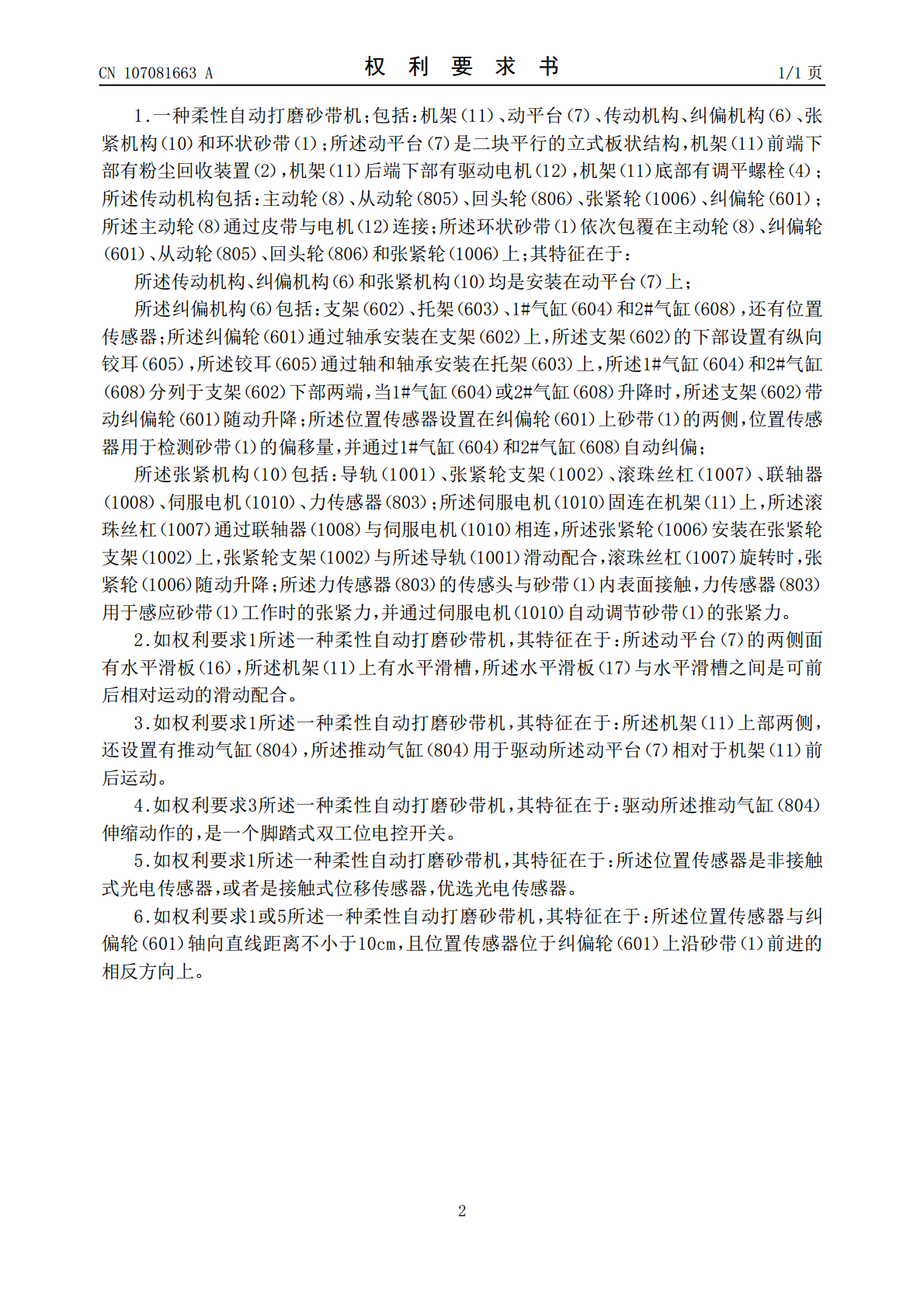
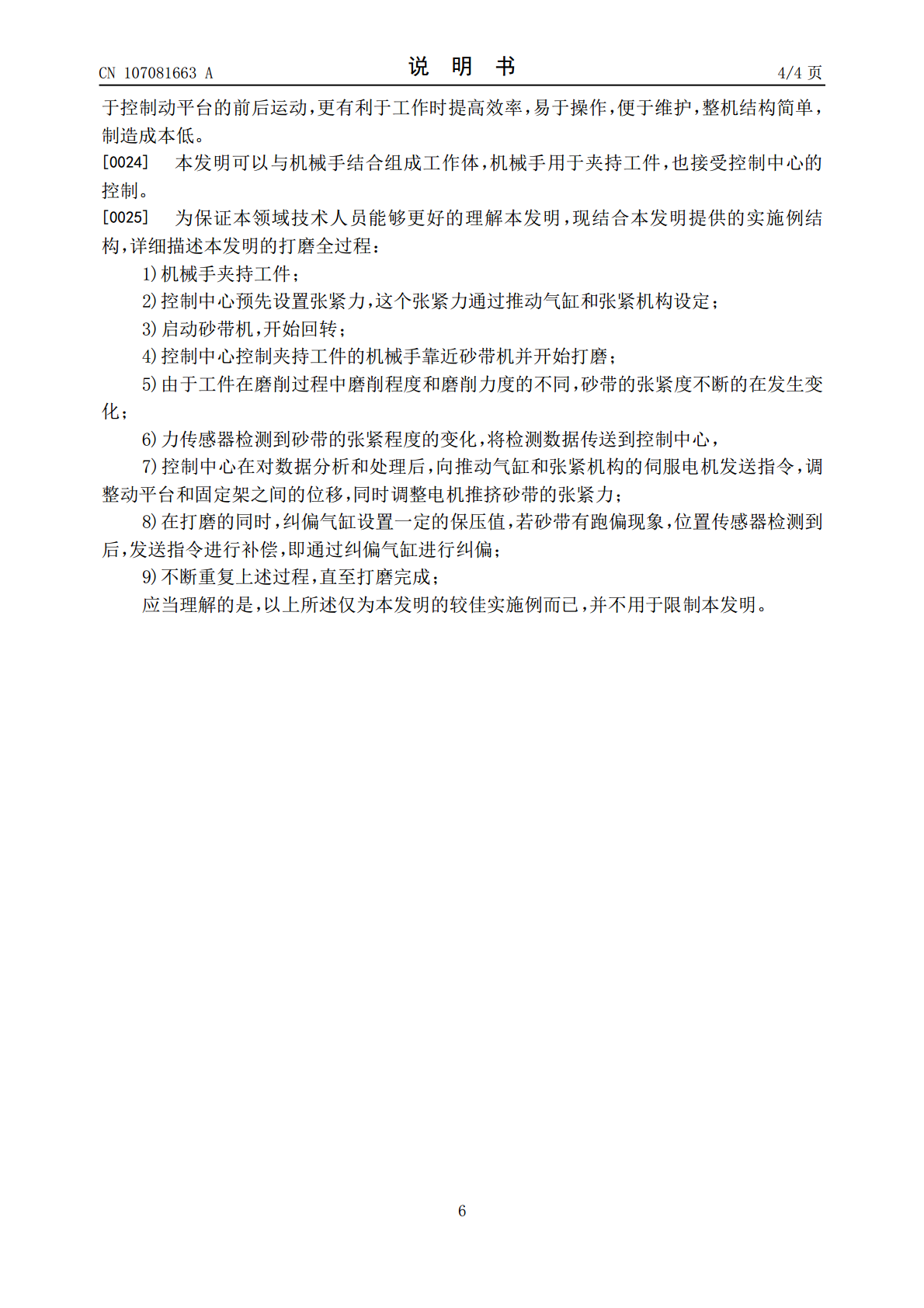
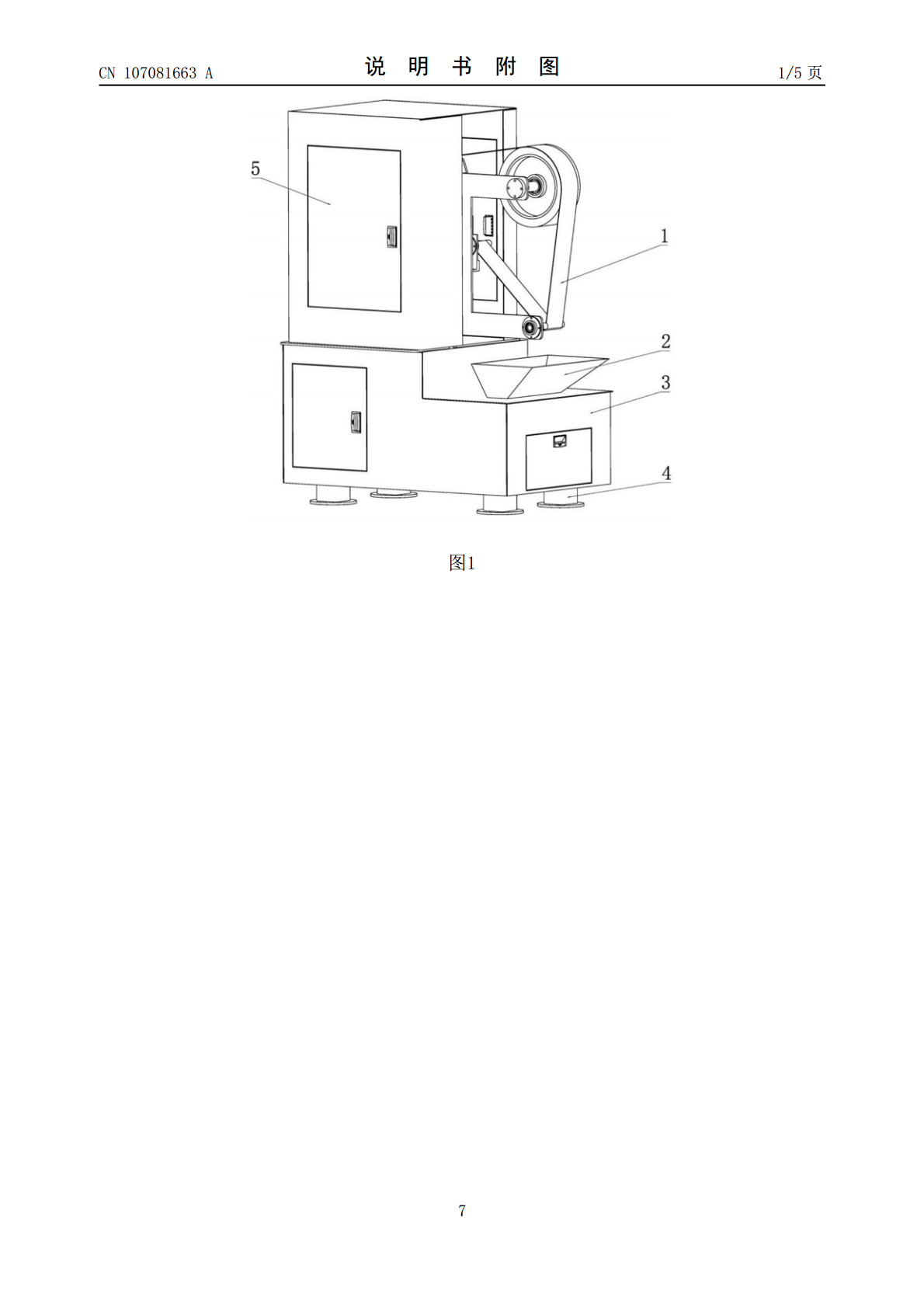
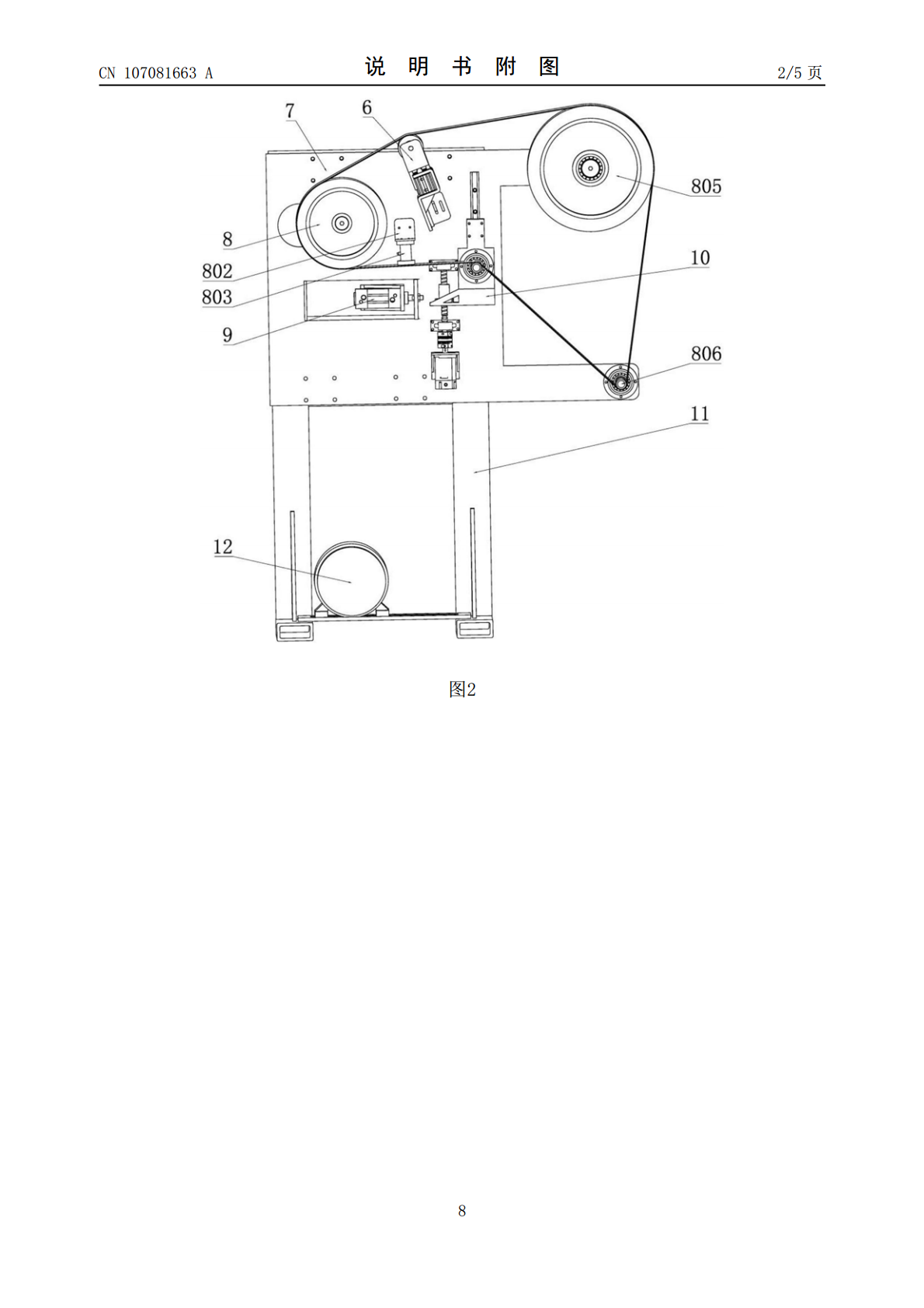
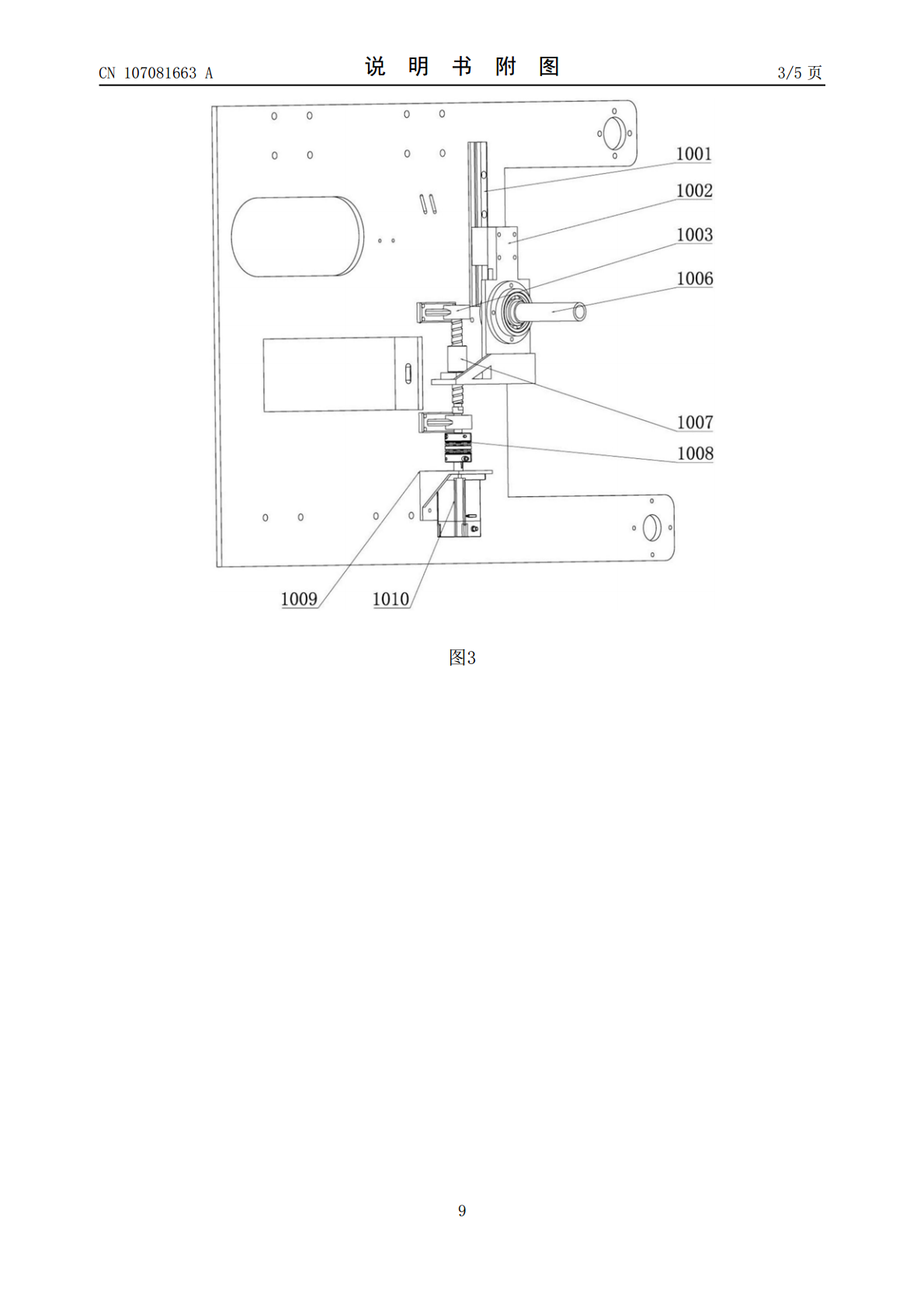
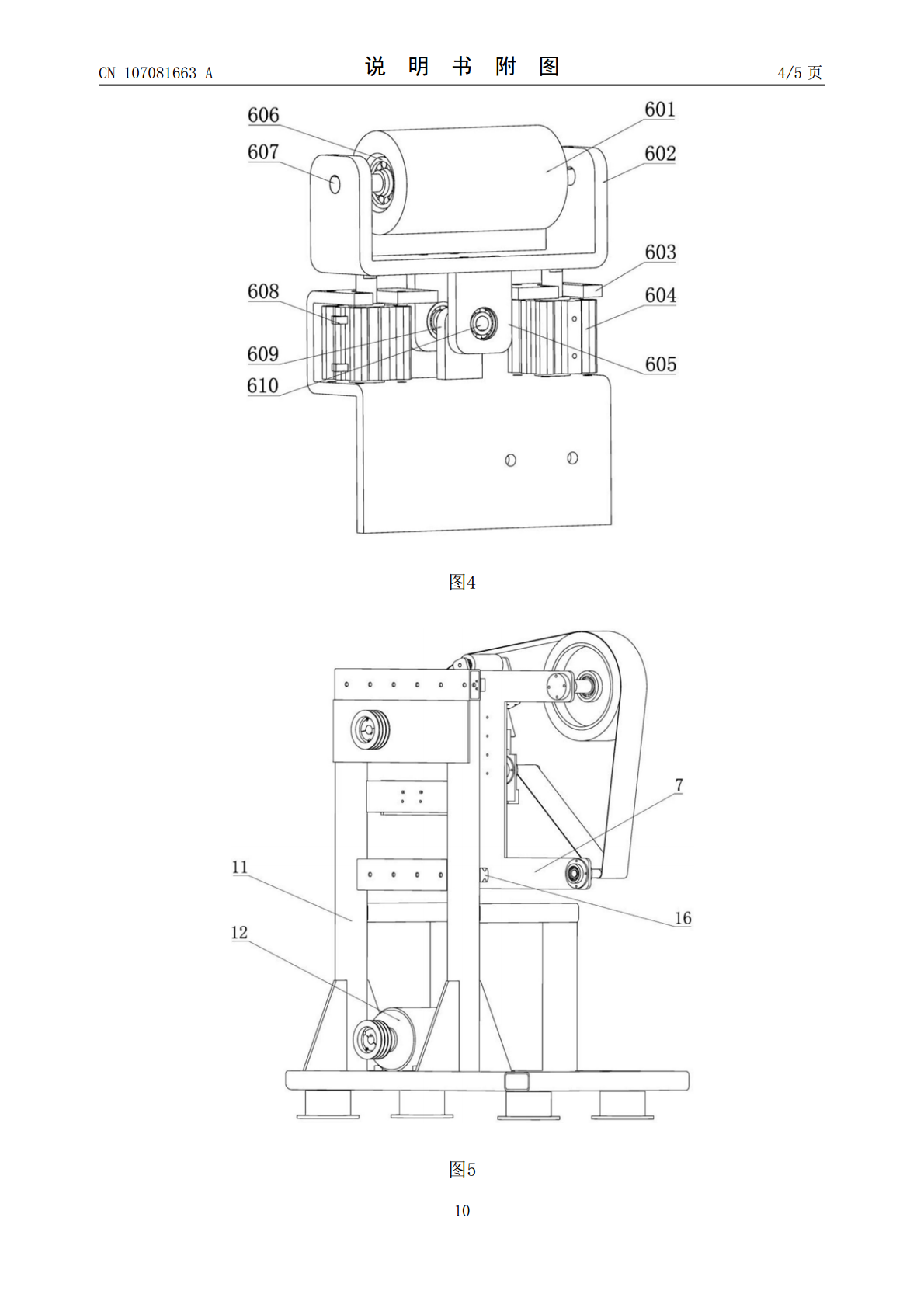
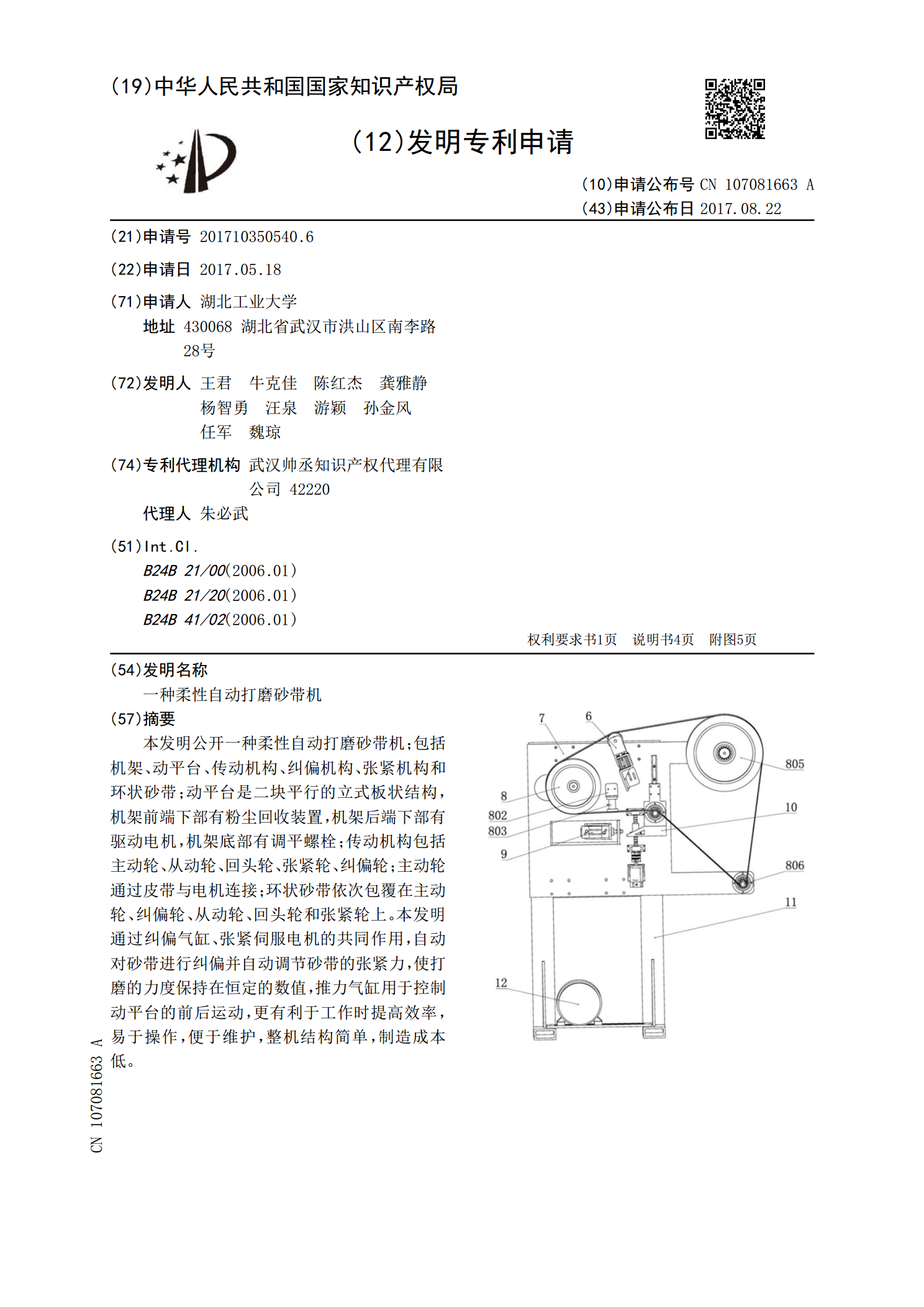
本发明公开一种柔性自动打磨砂带机;包括机架、动平台、传动机构、纠偏机构、张紧机构和环状砂带;动平台是二块平行的立式板状结构,机架前端下部有粉尘回收装置,机架后端下部有驱动电机,机架底部有调平螺栓;传动机构包括主动轮、从动轮、回头轮、张紧轮、纠偏轮;主动轮通过皮带与电机连接;环状砂带依次包覆在主动轮、纠偏轮、从动轮、回头轮和张紧轮上。本发明通过纠偏气缸、张紧伺服电机的共同作用,自动对砂带进行纠偏并自动调节砂带的张紧力,使打磨的力度保持在恒定的数值,推力气缸用于控制动平台的前后运动,更有利于工作时提高效率,易
一种柔性打磨砂带机.pdf
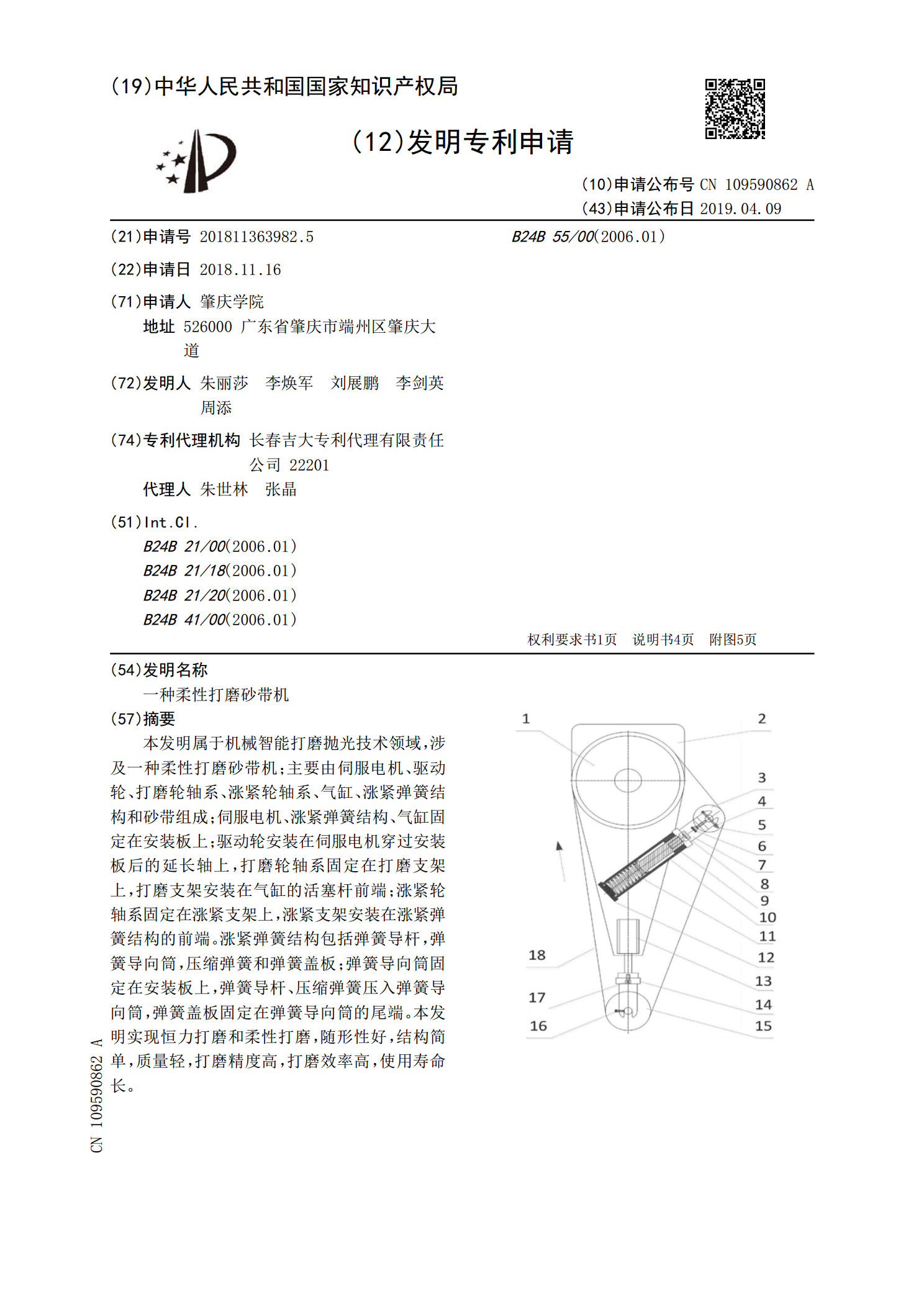
本发明属于机械智能打磨抛光技术领域,涉及一种柔性打磨砂带机;主要由伺服电机、驱动轮、打磨轮轴系、涨紧轮轴系、气缸、涨紧弹簧结构和砂带组成;伺服电机、涨紧弹簧结构、气缸固定在安装板上;驱动轮安装在伺服电机穿过安装板后的延长轴上,打磨轮轴系固定在打磨支架上,打磨支架安装在气缸的活塞杆前端;涨紧轮轴系固定在涨紧支架上,涨紧支架安装在涨紧弹簧结构的前端。涨紧弹簧结构包括弹簧导杆,弹簧导向筒,压缩弹簧和弹簧盖板;弹簧导向筒固定在安装板上,弹簧导杆、压缩弹簧压入弹簧导向筒,弹簧盖板固定在弹簧导向筒的尾端。本发明实现恒

自动磨砂机.pdf
本发明公开了自动磨砂机,包括砂带、机架以及驱动轮,还包括设置在机架上的第一滑轨以及设置在第一滑轨正下方且与第一滑轨平行的第二滑轨,所述第一滑轨和第二滑轨上分别设有若干个可沿其所在滑轨移动的从动轮,砂带包裹若干个从动轮以及驱动轮的外径。本发明通过在将砂带包裹在驱动轮以及若干个可沿其所在轨道移动的从动轮上,那么在打磨水龙头时,水龙头挤压从动轮并使其在其所在轨道上移动,随从动轮的受力增加或减少,砂带可多磨或少磨水龙头的余量,使水龙头壁厚始终保持在设定的目标值附近,打磨后可得到壁厚均匀的水龙头,实现均匀磨抛。本发
一种磨砂机.pdf
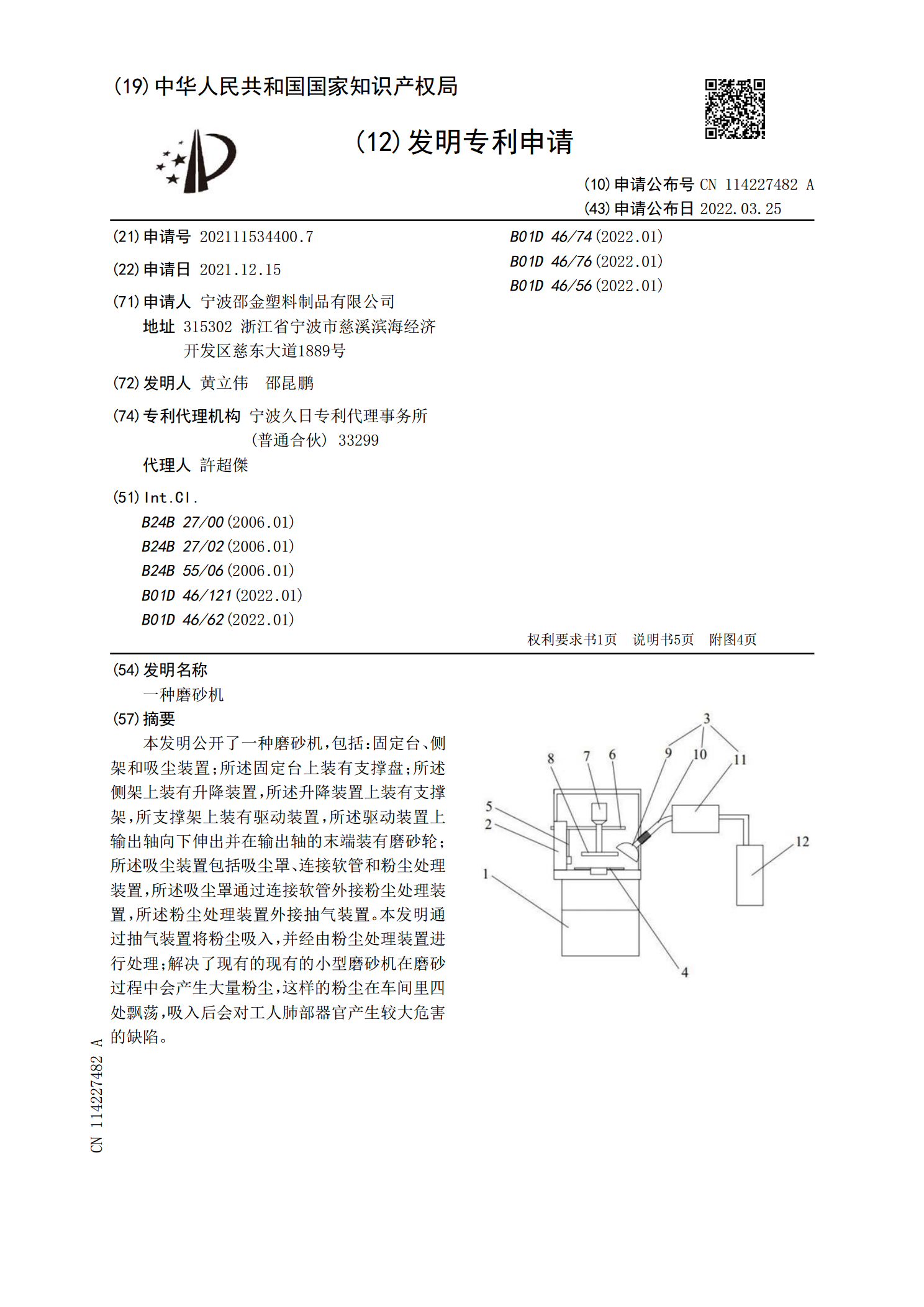
本发明公开了一种磨砂机,包括:固定台、侧架和吸尘装置;所述固定台上装有支撑盘;所述侧架上装有升降装置,所述升降装置上装有支撑架,所支撑架上装有驱动装置,所述驱动装置上输出轴向下伸出并在输出轴的末端装有磨砂轮;所述吸尘装置包括吸尘罩、连接软管和粉尘处理装置,所述吸尘罩通过连接软管外接粉尘处理装置,所述粉尘处理装置外接抽气装置。本发明通过抽气装置将粉尘吸入,并经由粉尘处理装置进行处理;解决了现有的现有的小型磨砂机在磨砂过程中会产生大量粉尘,这样的粉尘在车间里四处飘荡,吸入后会对工人肺部器官产生较大危害的缺陷。

一种磨砂机.pdf
本发明公开了一种磨砂机,该磨砂机包括筒状手柄、安装在手柄内的电机、与电机同轴连接的砂轮,所述电机为变频电机。本发明一种磨砂机,通过在手柄内安装变频电机并与电机同轴连接砂轮后,可以根据不同的工件,选择合适的砂轮后快速装配在电机上实施打磨作业,并且可以根据需要快速调节电机的速率。本发明一种磨砂机,结构简单、体积小巧、操作便捷、互换性强。