
一种柔性自驱动螺旋管道机器人.pdf

慧颖****23


1/8
2/8

3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种柔性自驱动螺旋管道机器人.pdf
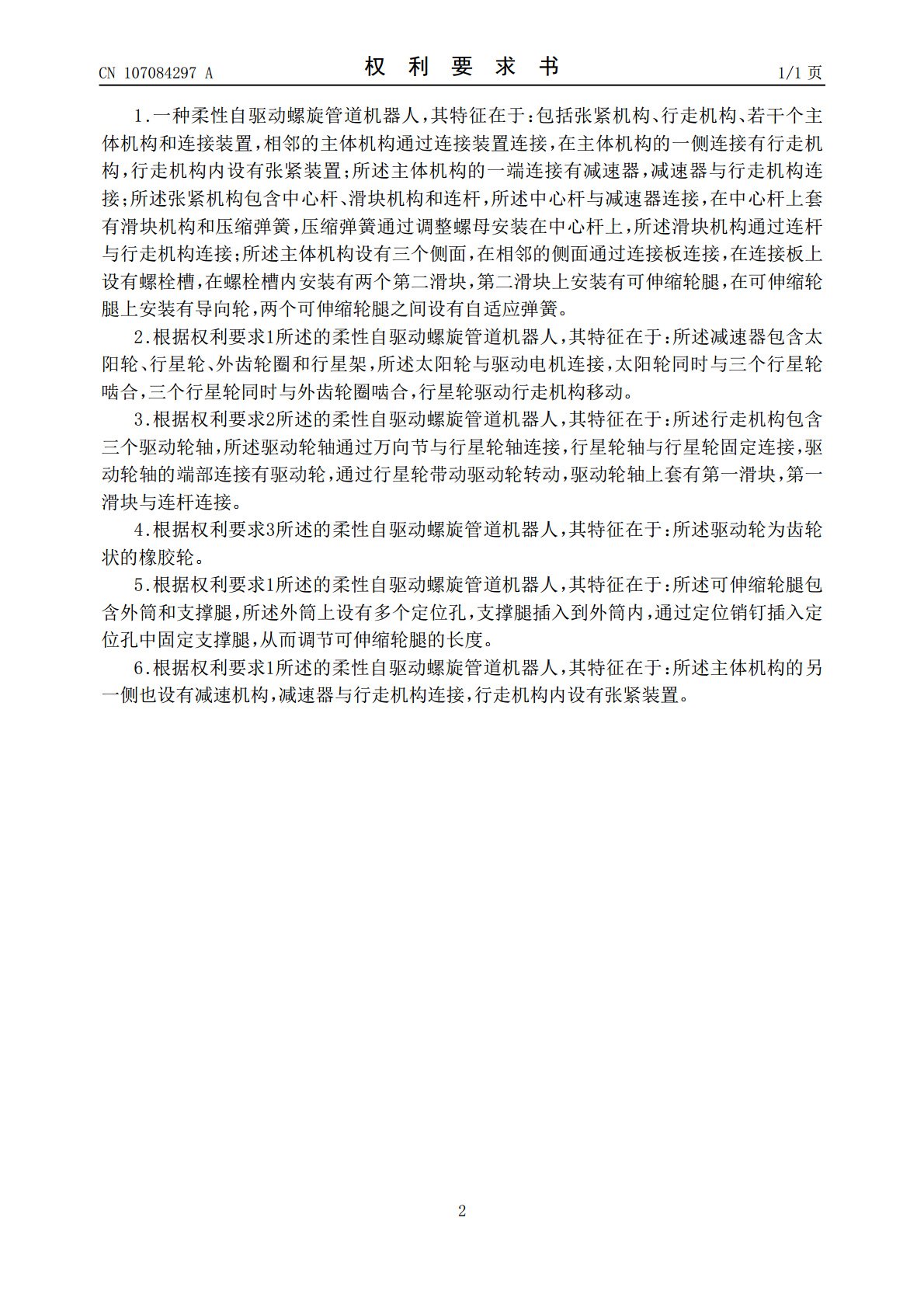
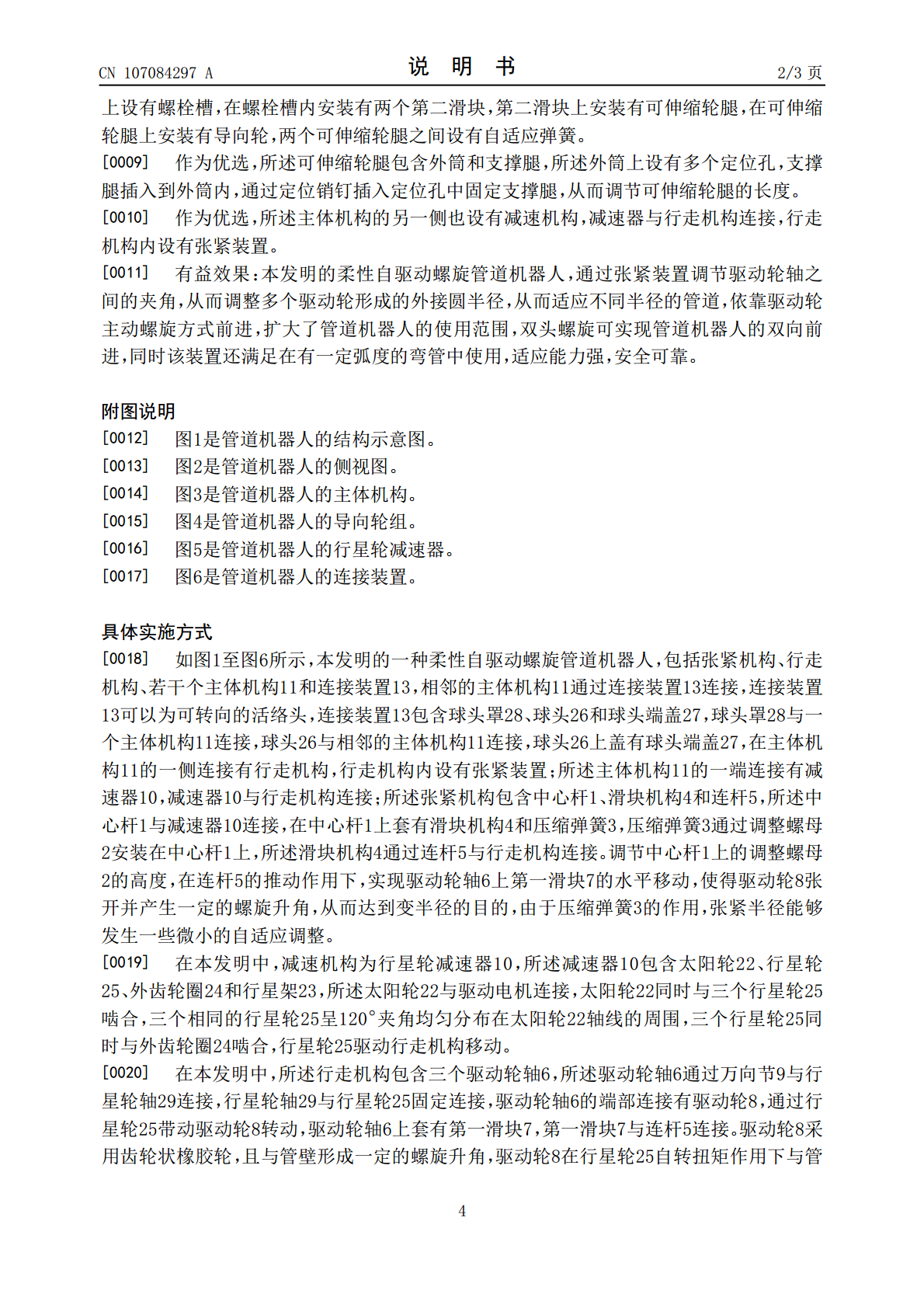
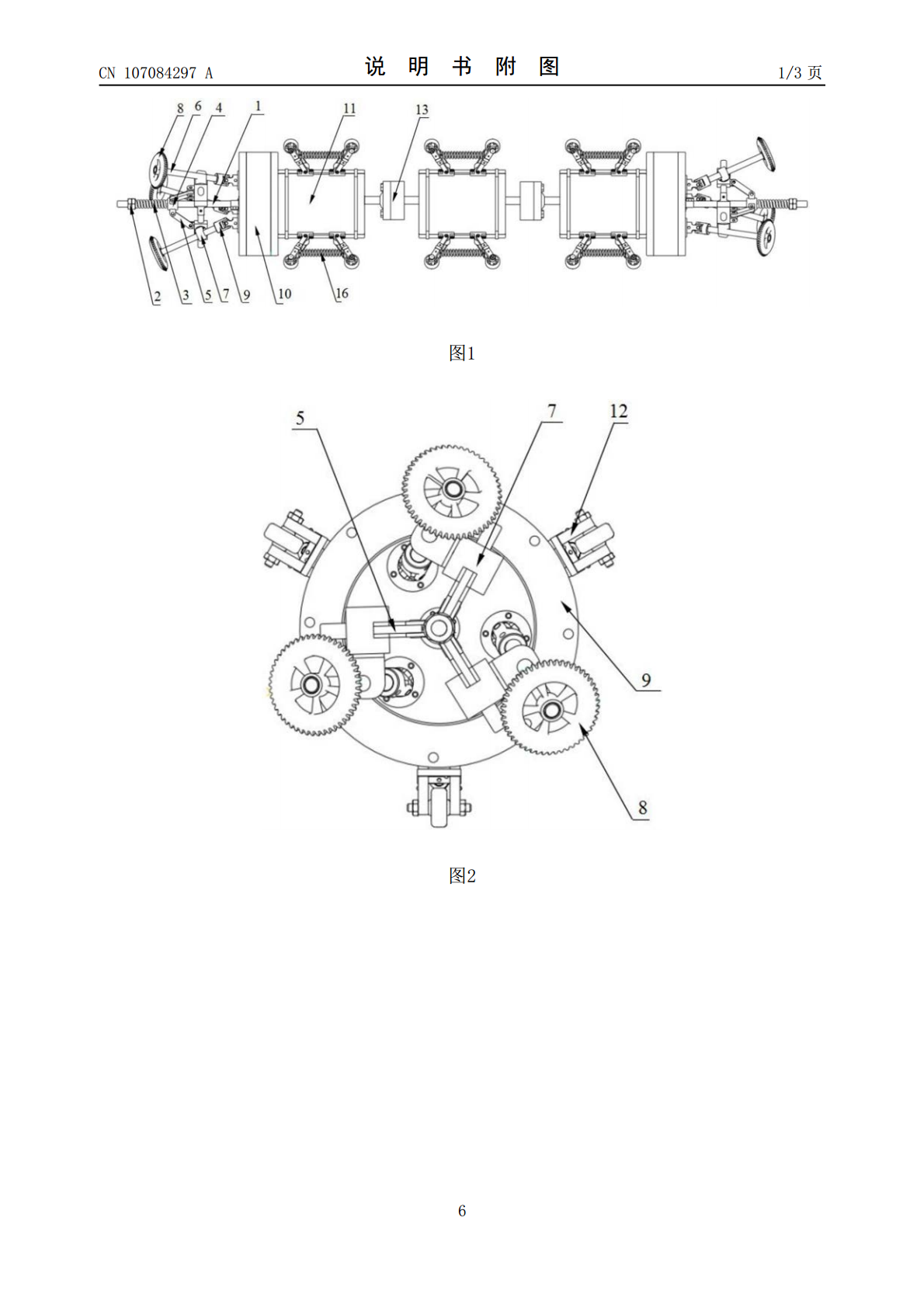
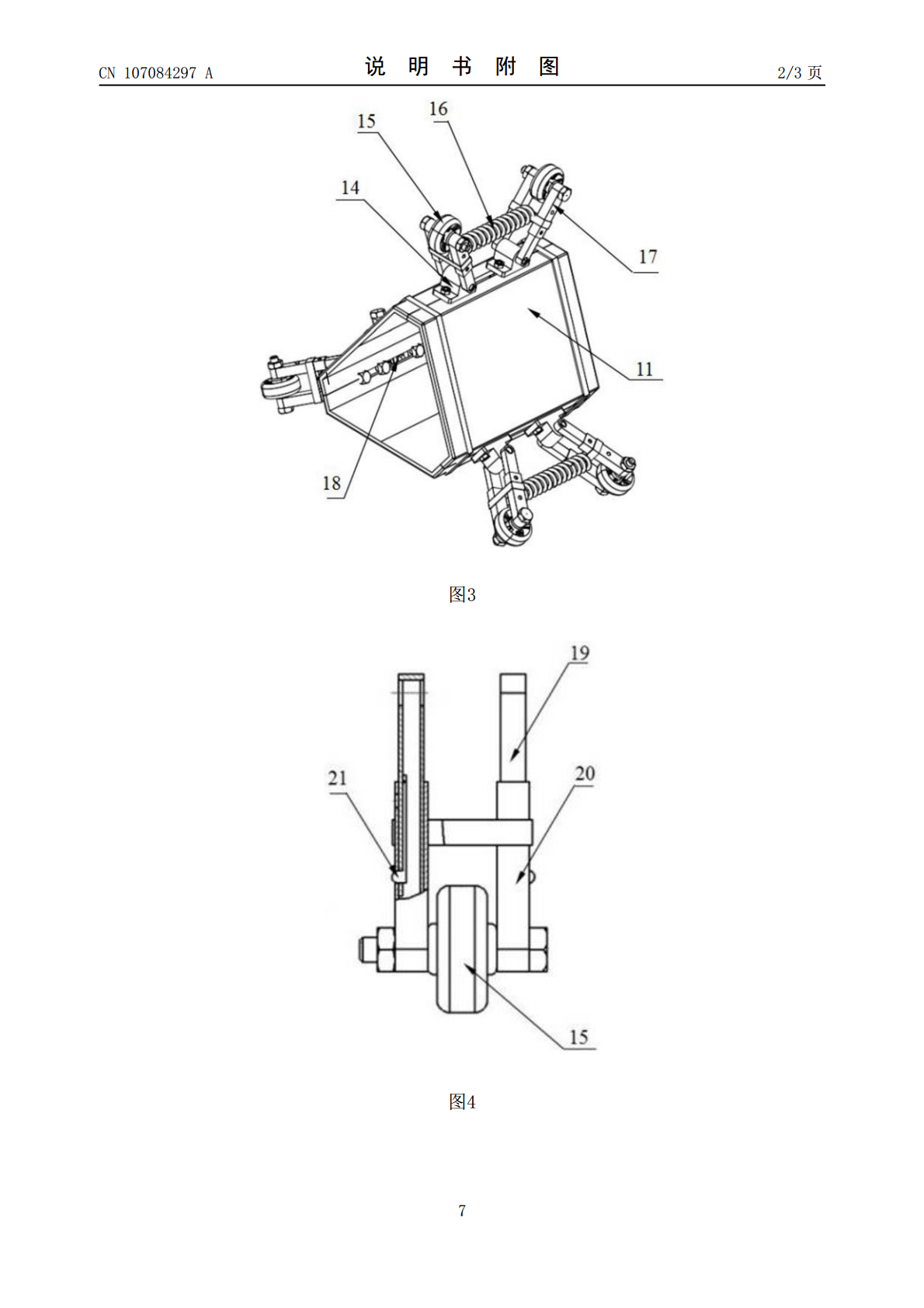
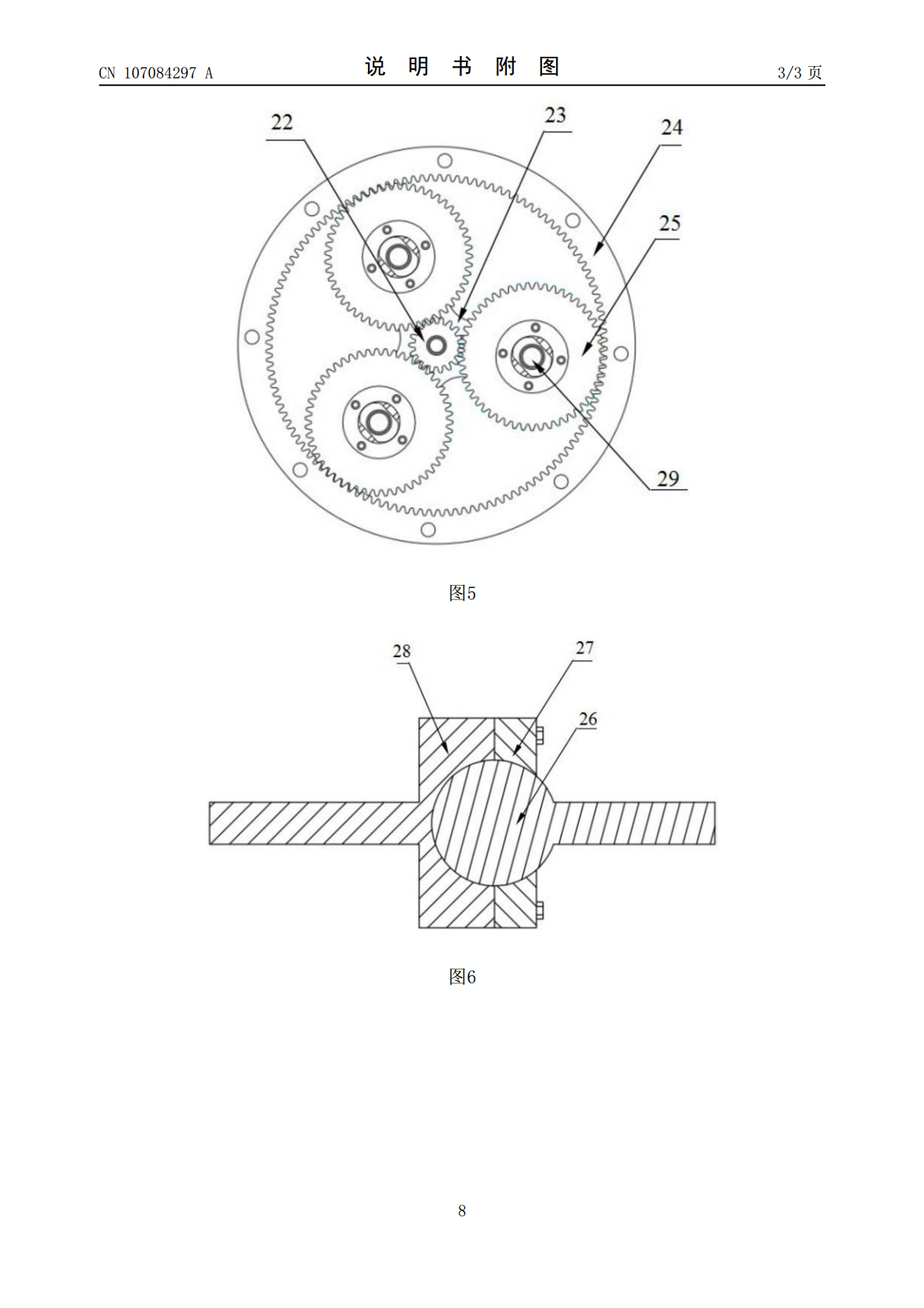
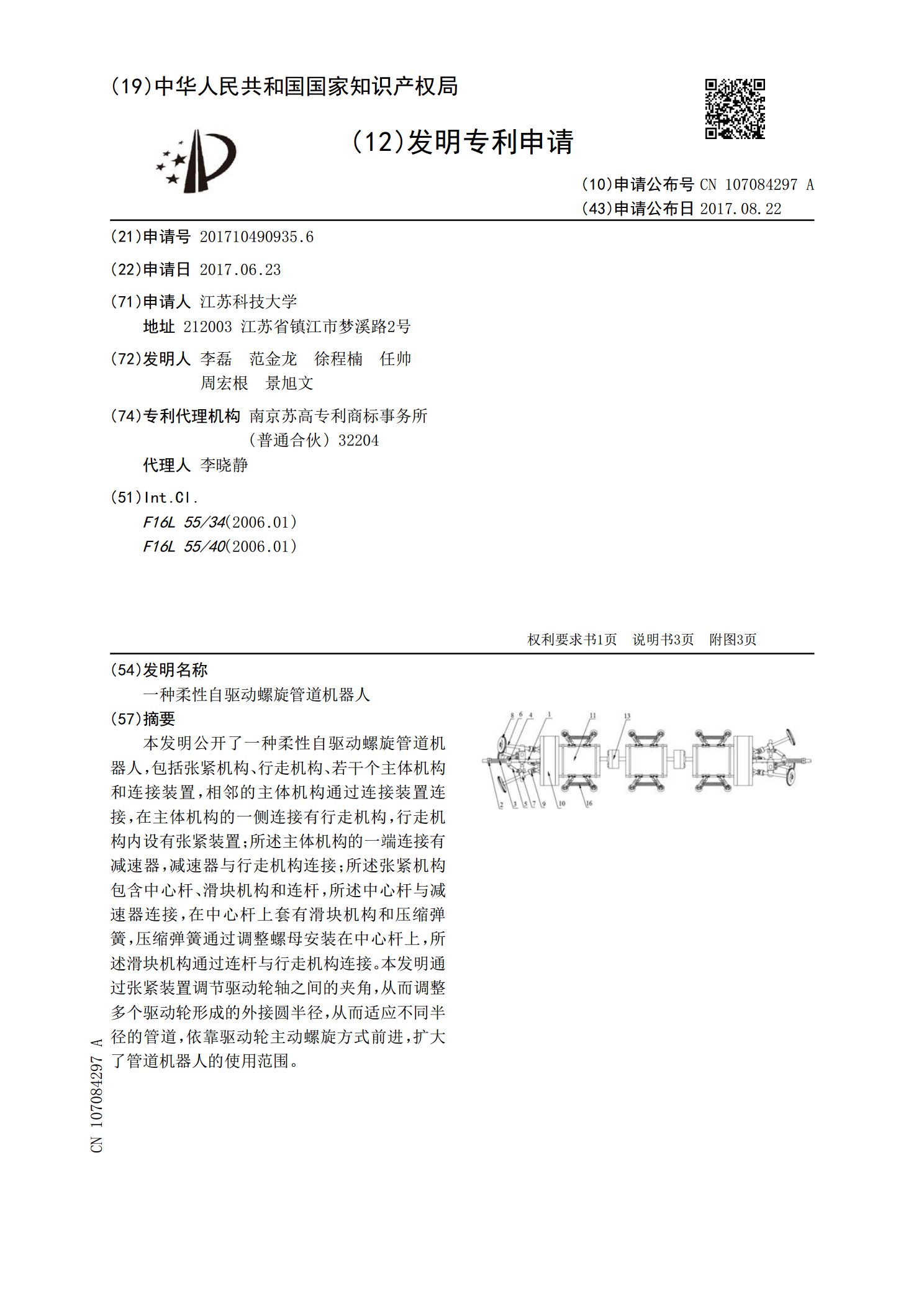
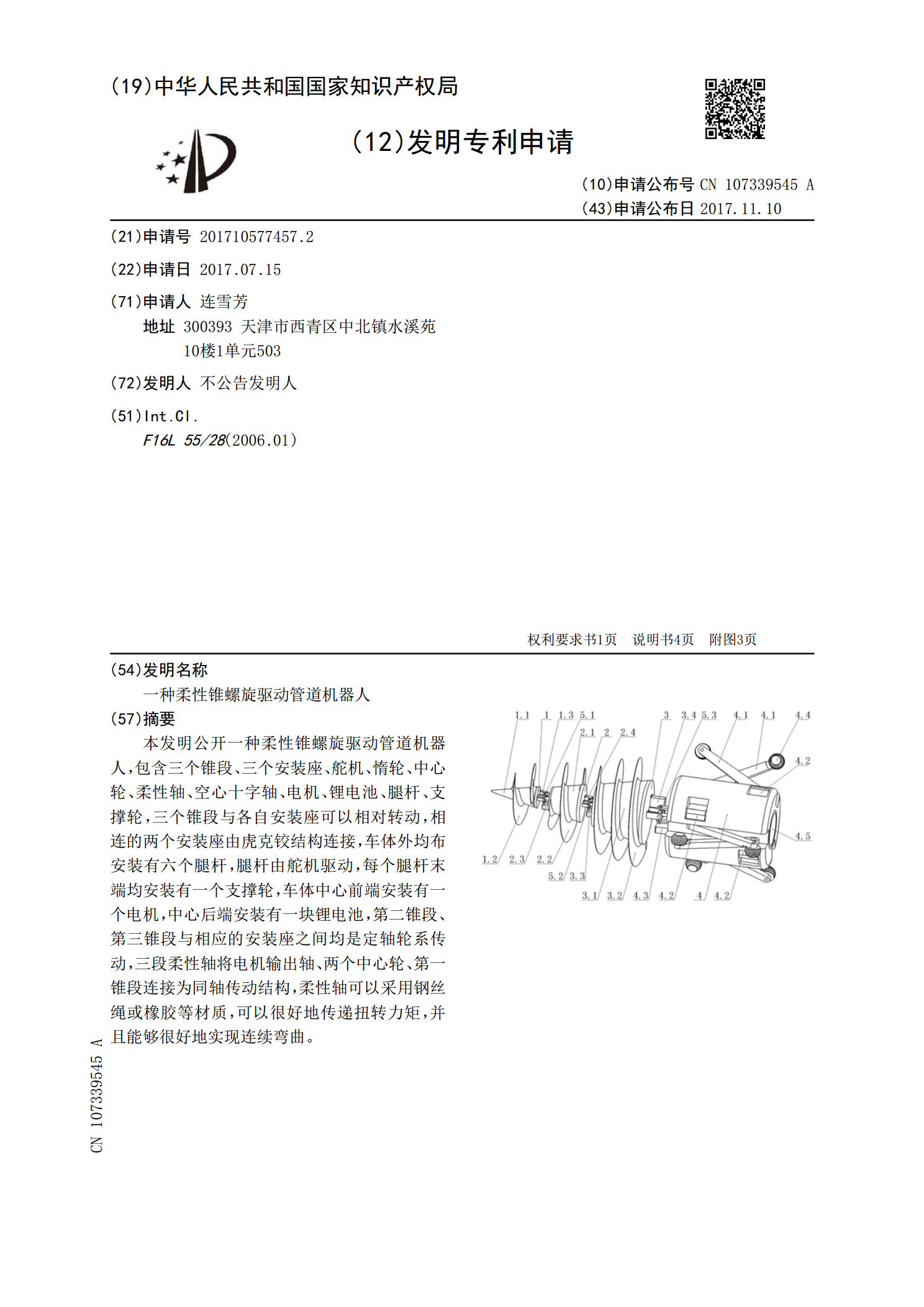
本发明公开了一种柔性自驱动螺旋管道机器人,包括张紧机构、行走机构、若干个主体机构和连接装置,相邻的主体机构通过连接装置连接,在主体机构的一侧连接有行走机构,行走机构内设有张紧装置;所述主体机构的一端连接有减速器,减速器与行走机构连接;所述张紧机构包含中心杆、滑块机构和连杆,所述中心杆与减速器连接,在中心杆上套有滑块机构和压缩弹簧,压缩弹簧通过调整螺母安装在中心杆上,所述滑块机构通过连杆与行走机构连接。本发明通过张紧装置调节驱动轮轴之间的夹角,从而调整多个驱动轮形成的外接圆半径,从而适应不同半径的管道,依靠
一种柔性锥螺旋驱动管道机器人.pdf
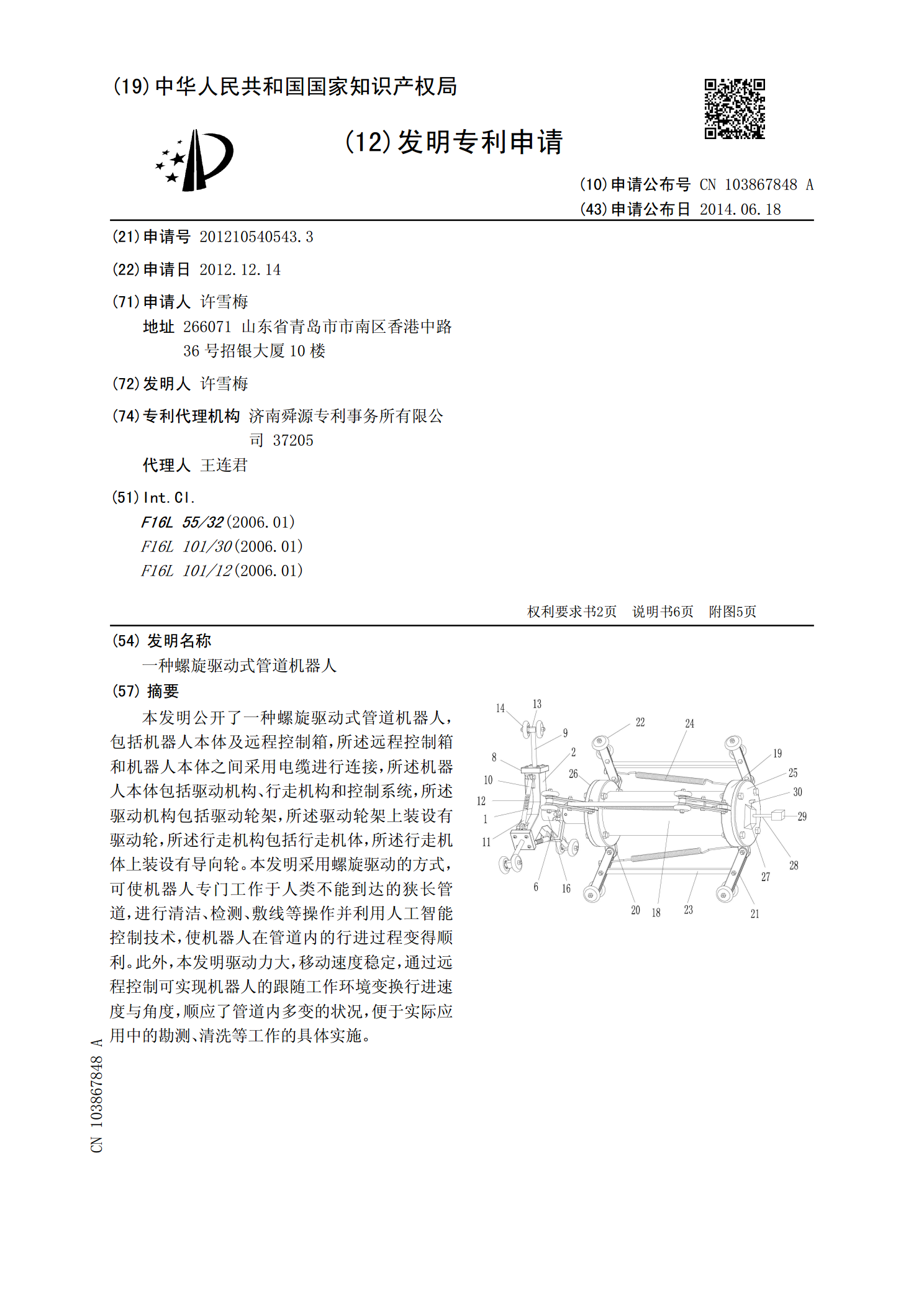
本发明公开一种柔性锥螺旋驱动管道机器人,包含三个锥段、三个安装座、舵机、惰轮、中心轮、柔性轴、空心十字轴、电机、锂电池、腿杆、支撑轮,三个锥段与各自安装座可以相对转动,相连的两个安装座由虎克铰结构连接,车体外均布安装有六个腿杆,腿杆由舵机驱动,每个腿杆末端均安装有一个支撑轮,车体中心前端安装有一个电机,中心后端安装有一块锂电池,第二锥段、第三锥段与相应的安装座之间均是定轴轮系传动,三段柔性轴将电机输出轴、两个中心轮、第一锥段连接为同轴传动结构,柔性轴可以采用钢丝绳或橡胶等材质,可以很好地传递扭转力矩,并且
一种螺旋驱动式管道机器人.pdf
本发明公开了一种螺旋驱动式管道机器人,包括机器人本体及远程控制箱,所述远程控制箱和机器人本体之间采用电缆进行连接,所述机器人本体包括驱动机构、行走机构和控制系统,所述驱动机构包括驱动轮架,所述驱动轮架上装设有驱动轮,所述行走机构包括行走机体,所述行走机体上装设有导向轮。本发明采用螺旋驱动的方式,可使机器人专门工作于人类不能到达的狭长管道,进行清洁、检测、敷线等操作并利用人工智能控制技术,使机器人在管道内的行进过程变得顺利。此外,本发明驱动力大,移动速度稳定,通过远程控制可实现机器人的跟随工作环境变换行进速
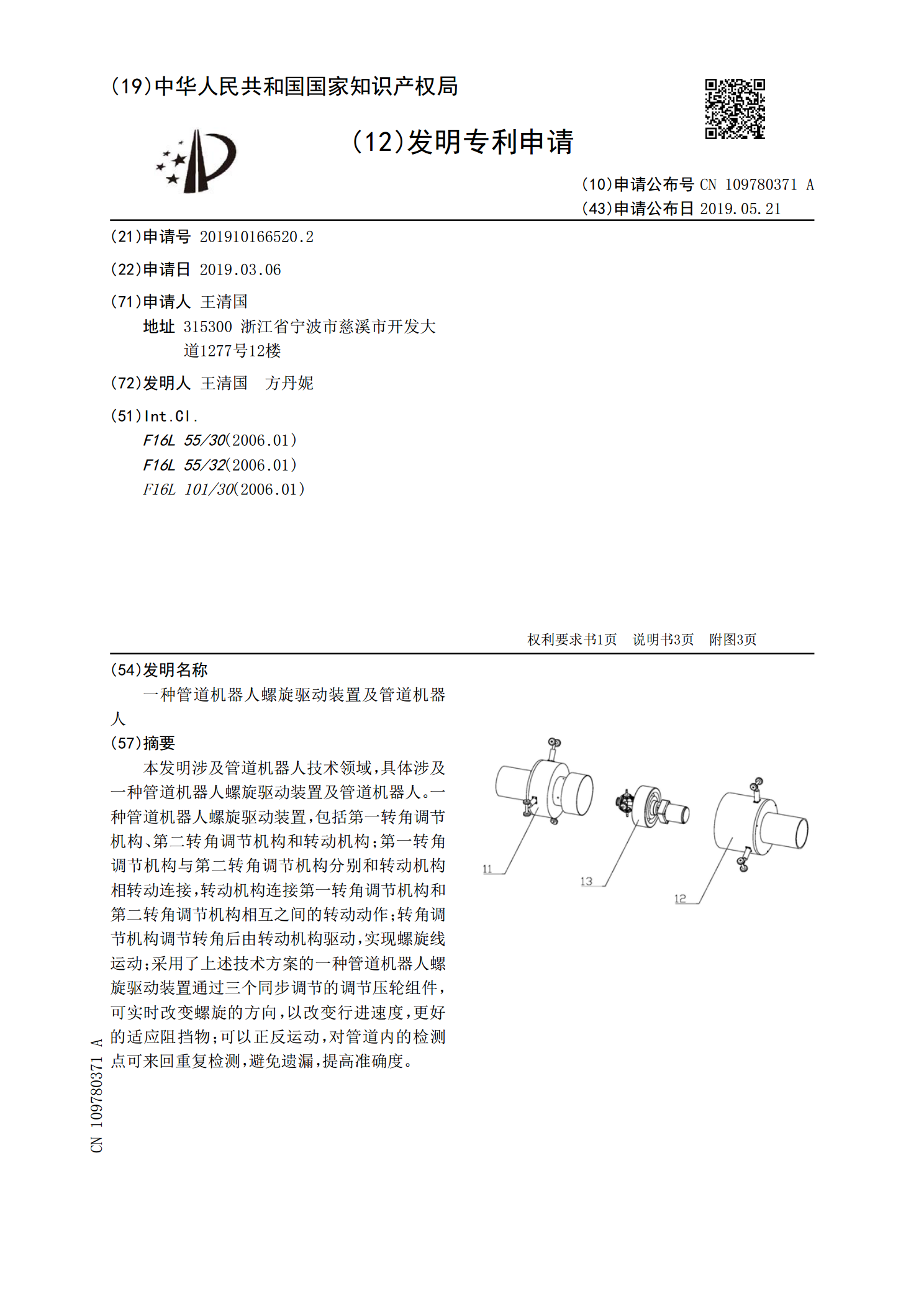
一种管道机器人螺旋驱动装置及管道机器人.pdf
本发明涉及管道机器人技术领域,具体涉及一种管道机器人螺旋驱动装置及管道机器人。一种管道机器人螺旋驱动装置,包括第一转角调节机构、第二转角调节机构和转动机构;第一转角调节机构与第二转角调节机构分别和转动机构相转动连接,转动机构连接第一转角调节机构和第二转角调节机构相互之间的转动动作;转角调节机构调节转角后由转动机构驱动,实现螺旋线运动;采用了上述技术方案的一种管道机器人螺旋驱动装置通过三个同步调节的调节压轮组件,可实时改变螺旋的方向,以改变行进速度,更好的适应阻挡物;可以正反运动,对管道内的检测点可来回重复
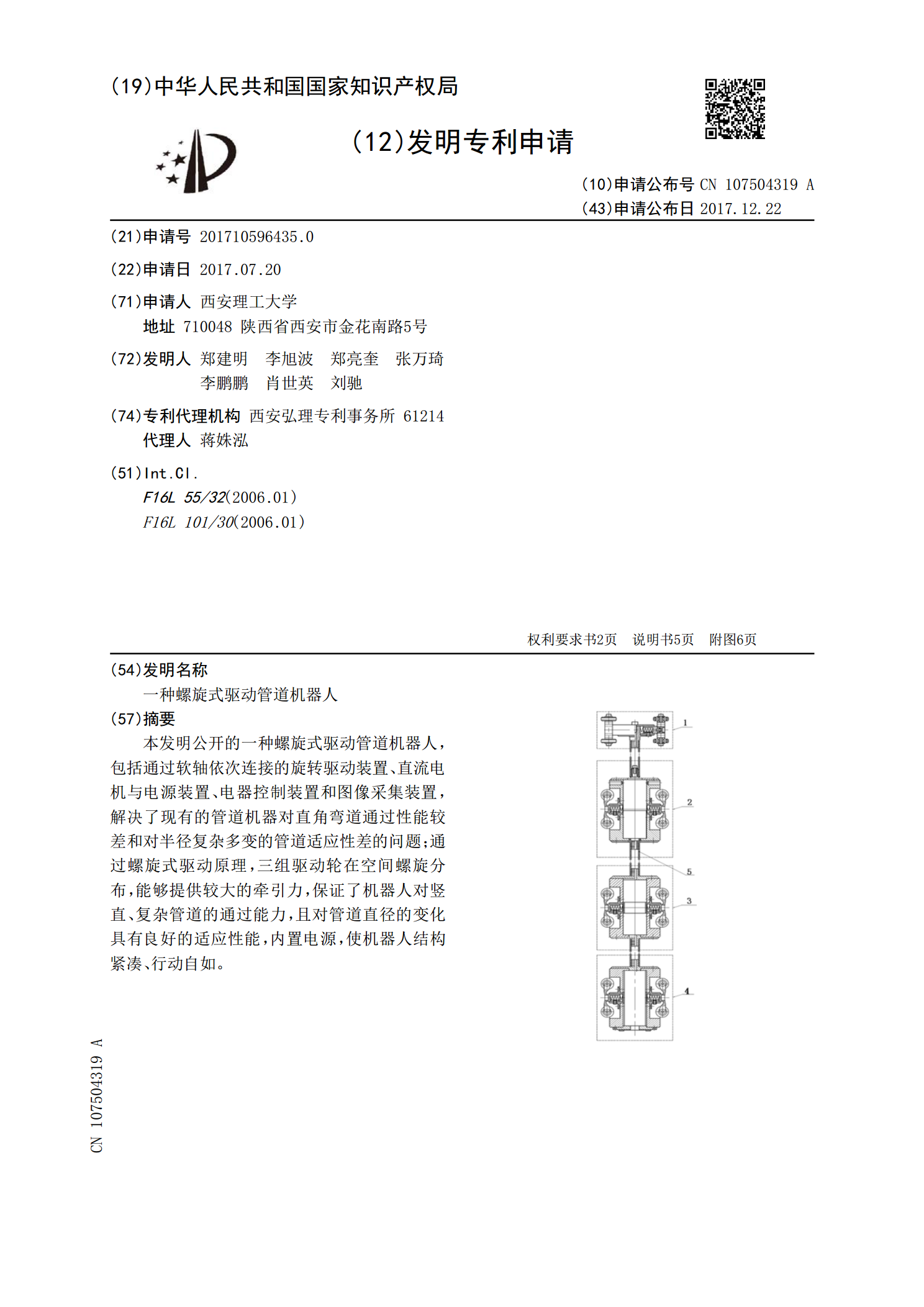
一种螺旋式驱动管道机器人.pdf
本发明公开的一种螺旋式驱动管道机器人,包括通过软轴依次连接的旋转驱动装置、直流电机与电源装置、电器控制装置和图像采集装置,解决了现有的管道机器对直角弯道通过性能较差和对半径复杂多变的管道适应性差的问题;通过螺旋式驱动原理,三组驱动轮在空间螺旋分布,能够提供较大的牵引力,保证了机器人对竖直、复杂管道的通过能力,且对管道直径的变化具有良好的适应性能,内置电源,使机器人结构紧凑、行动自如。