
用于确定风力涡轮机叶片的动态扭曲的方法和系统.pdf

努力****梓颖

1/10
2/10
3/10
4/10
5/10
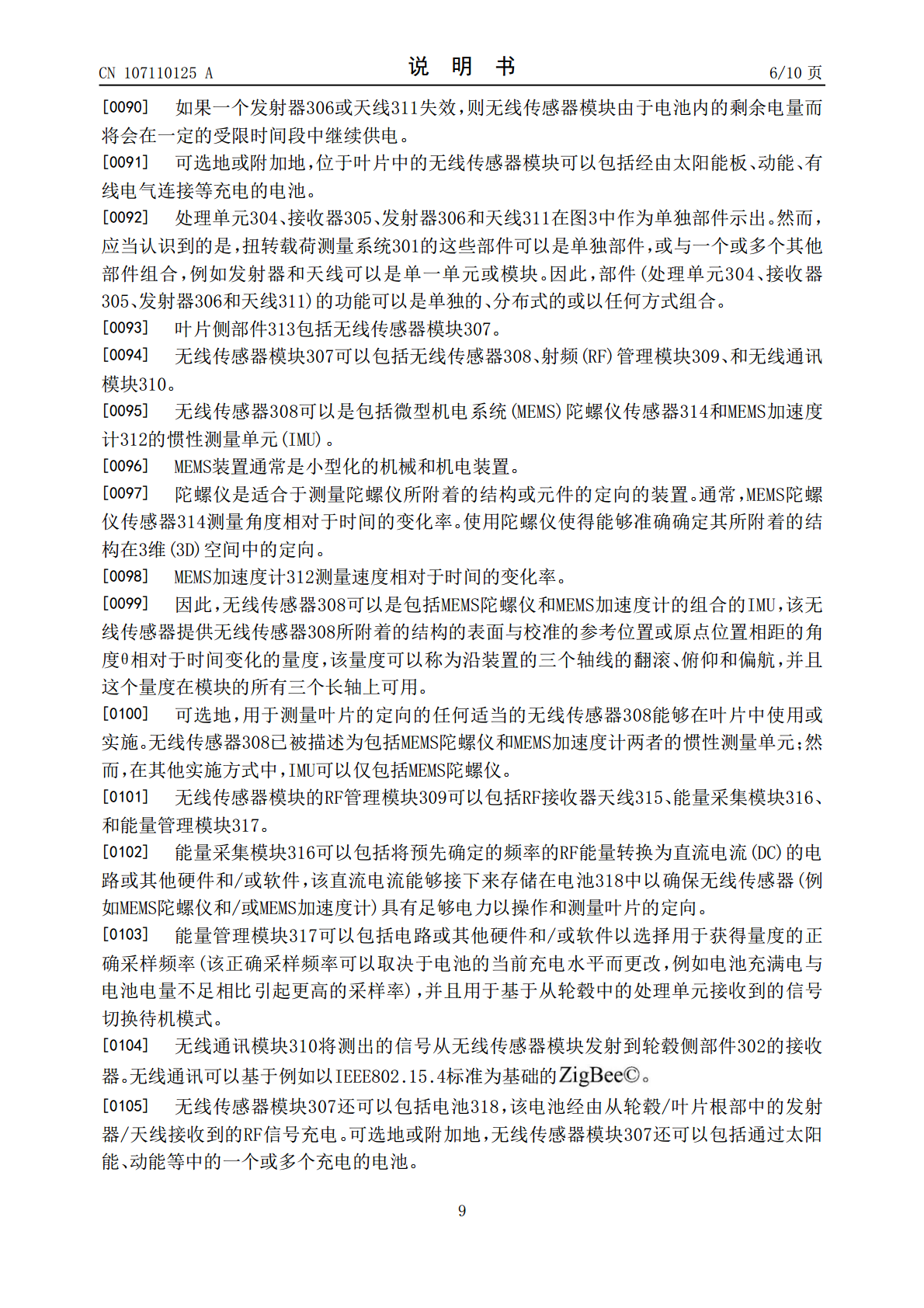
6/10
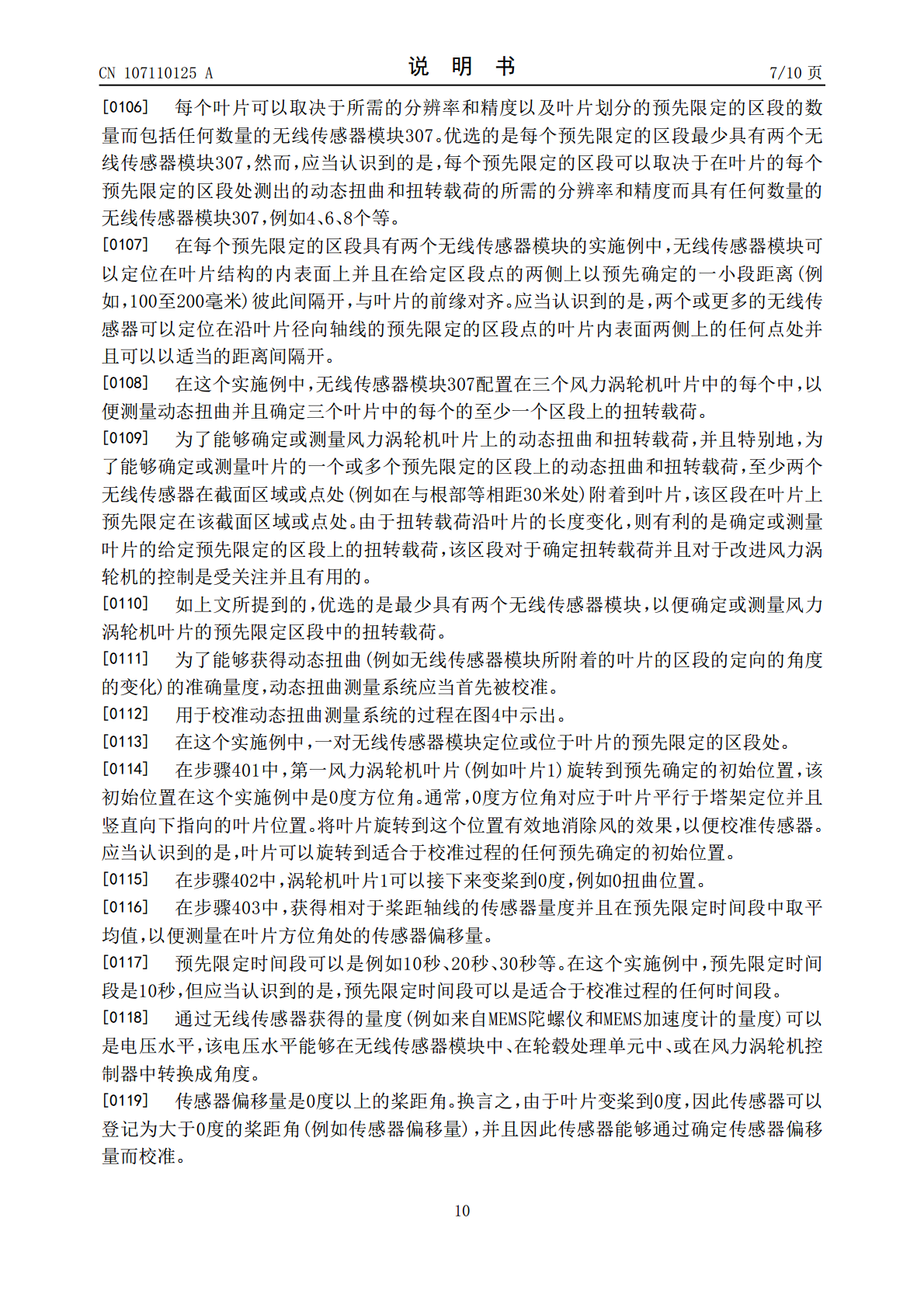
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于确定风力涡轮机叶片的动态扭曲的方法和系统.pdf
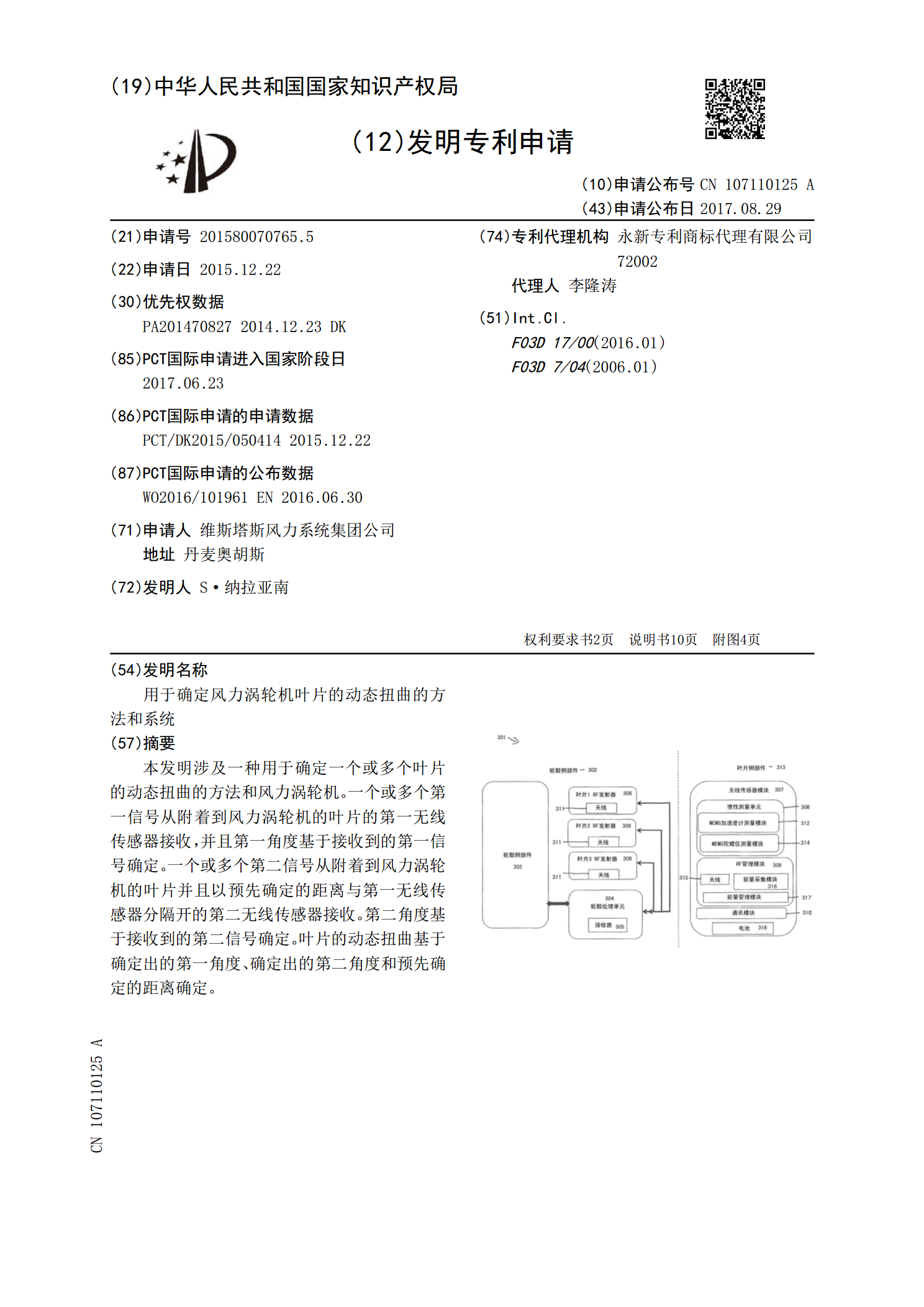
本发明涉及一种用于确定一个或多个叶片的动态扭曲的方法和风力涡轮机。一个或多个第一信号从附着到风力涡轮机的叶片的第一无线传感器接收,并且第一角度基于接收到的第一信号确定。一个或多个第二信号从附着到风力涡轮机的叶片并且以预先确定的距离与第一无线传感器分隔开的第二无线传感器接收。第二角度基于接收到的第二信号确定。叶片的动态扭曲基于确定出的第一角度、确定出的第二角度和预先确定的距离确定。
用于确定风力涡轮机叶片的偏转的系统和方法.pdf
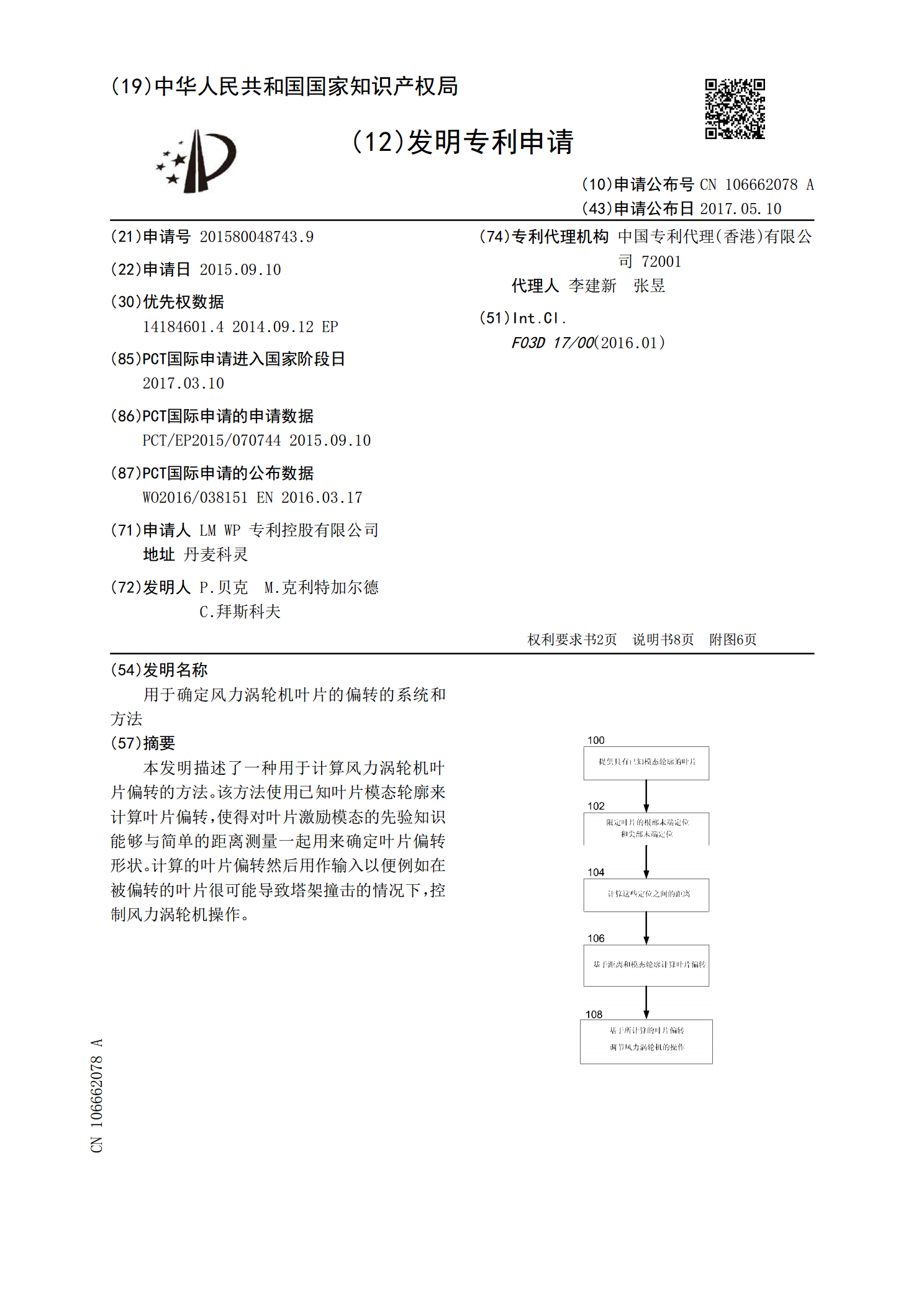
本发明描述了一种用于计算风力涡轮机叶片偏转的方法。该方法使用已知叶片模态轮廓来计算叶片偏转,使得对叶片激励模态的先验知识能够与简单的距离测量一起用来确定叶片偏转形状。计算的叶片偏转然后用作输入以便例如在被偏转的叶片很可能导致塔架撞击的情况下,控制风力涡轮机操作。

用于确定风力涡轮机叶片的载荷的方法和装置.pdf
风力涡轮机叶片(10)包括具有光径的传感器系统,所述光径包括第一光学传感器纤维(84)、第二光学传感器纤维(86)和跳接光纤(88),所述第一光学传感器纤维包括具有第一纤芯直径的第一纤芯,其中所述第一光学传感器纤维从第一端延伸到第二端,并且包括至少一个传感器(47A),第二光学传感器纤维包括具有第二纤芯直径的第二纤芯,其中所述第二光学传感器纤维从第一端延伸到第二端,并且包括至少一个传感器(47B),所述跳接光纤包括具有跳接纤芯直径的跳接纤芯,其中所述跳接光纤从第一端延伸到第二端,并且连接所述第一光学传感器

用于确定风力涡轮机叶片的载荷的方法和装置.pdf
用于监控风力涡轮机叶片(10)的弯曲力矩的方法和叶片监控系统。该方法包括获得第一传感器组信号,该第一传感器组信号表示沿着风力涡轮机叶片的纵向轴线在不同于末梢(14)端的第一传感器位置处的第一弯曲力矩,并且基于第一传感器组信号来估算沿着纵向轴线在第一估算位置处的弯曲力矩,其中沿着纵向轴线第一传感器位置不同于第一估算位置。该叶片监控系统包括处理单元和连接到处理单元的接口,该处理单元配置成执行该方法。
用于确定风力涡轮机转子叶片的污染状态的系统和方法.pdf
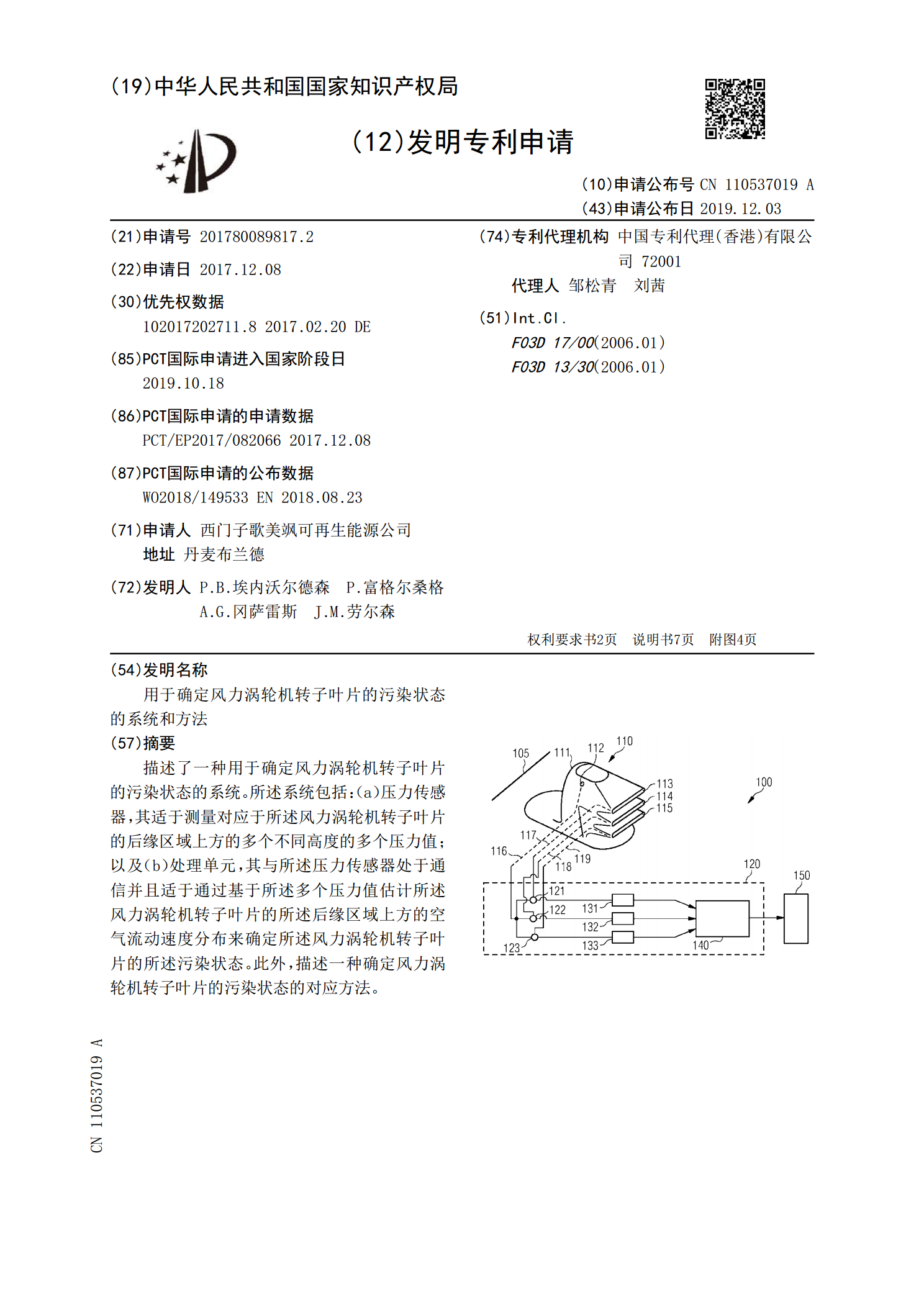
描述了一种用于确定风力涡轮机转子叶片的污染状态的系统。所述系统包括:(a)压力传感器,其适于测量对应于所述风力涡轮机转子叶片的后缘区域上方的多个不同高度的多个压力值;以及(b)处理单元,其与所述压力传感器处于通信并且适于通过基于所述多个压力值估计所述风力涡轮机转子叶片的所述后缘区域上方的空气流动速度分布来确定所述风力涡轮机转子叶片的所述污染状态。此外,描述一种确定风力涡轮机转子叶片的污染状态的对应方法。