
一种小体积、大捕获域、强锁紧力空间在轨重复锁紧装置.pdf

书生****瑞梦


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种小体积、大捕获域、强锁紧力空间在轨重复锁紧装置.pdf
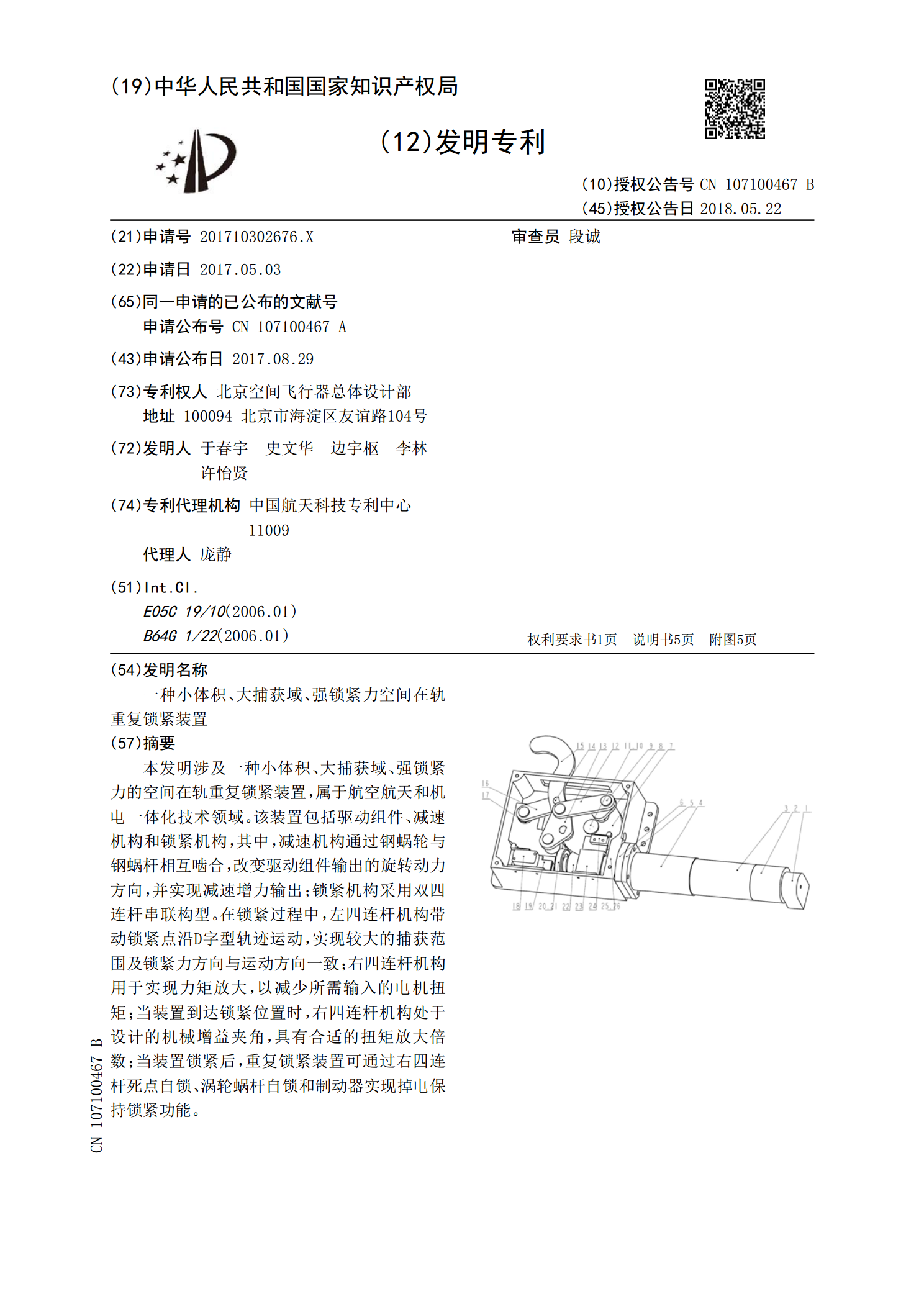
本发明涉及一种小体积、大捕获域、强锁紧力的空间在轨重复锁紧装置,属于航空航天和机电一体化技术领域。该装置包括驱动组件、减速机构和锁紧机构,其中,减速机构通过钢蜗轮与钢蜗杆相互啮合,改变驱动组件输出的旋转动力方向,并实现减速增力输出;锁紧机构采用双四连杆串联构型。在锁紧过程中,左四连杆机构带动锁紧点沿D字型轨迹运动,实现较大的捕获范围及锁紧力方向与运动方向一致;右四连杆机构用于实现力矩放大,以减少所需输入的电机扭矩;当装置到达锁紧位置时,右四连杆机构处于设计的机械增益夹角,具有合适的扭矩放大倍数;当装置锁紧
一种空间捕获锁紧装置.pdf
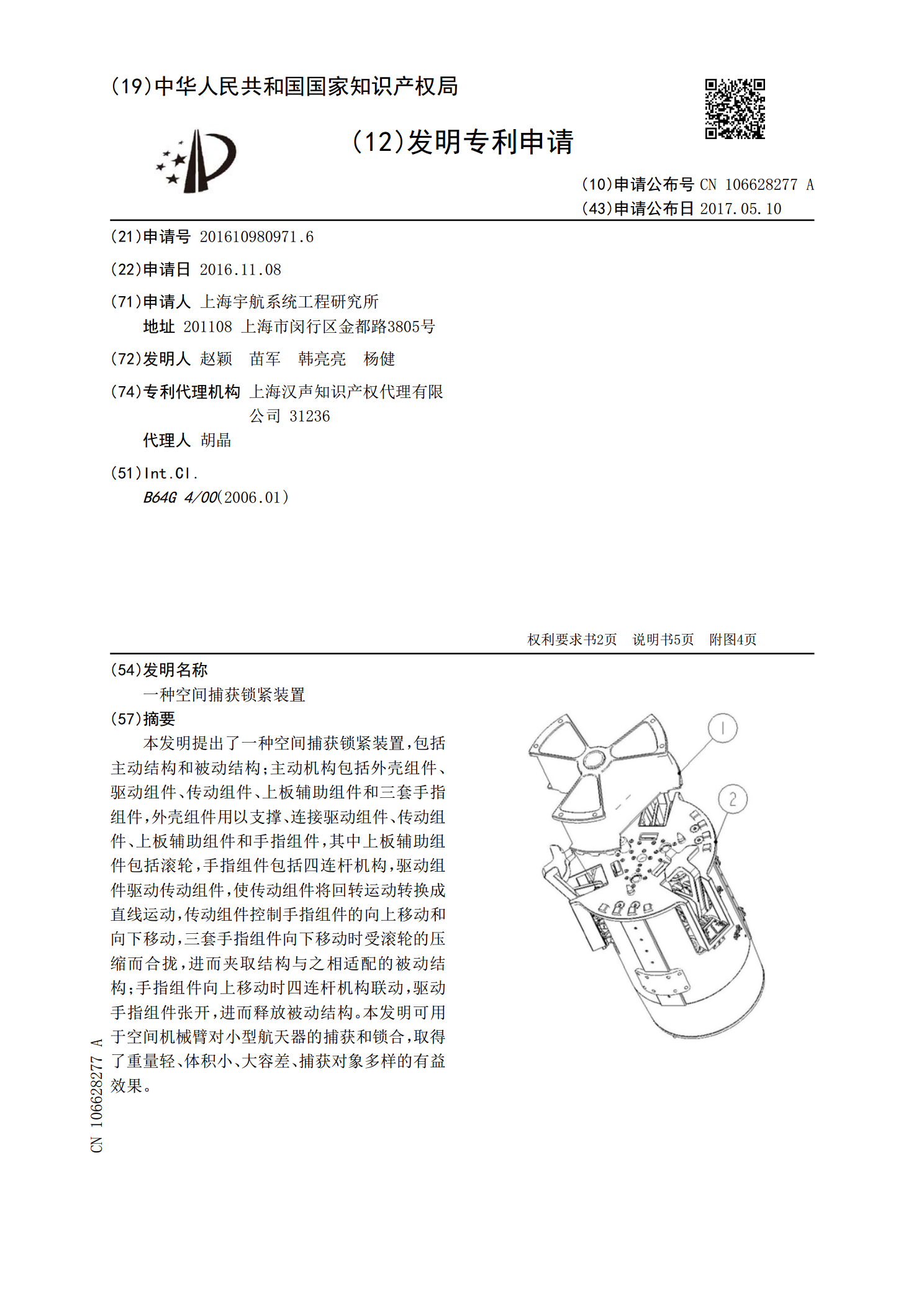
本发明提出了一种空间捕获锁紧装置,包括主动结构和被动结构;主动机构包括外壳组件、驱动组件、传动组件、上板辅助组件和三套手指组件,外壳组件用以支撑、连接驱动组件、传动组件、上板辅助组件和手指组件,其中上板辅助组件包括滚轮,手指组件包括四连杆机构,驱动组件驱动传动组件,使传动组件将回转运动转换成直线运动,传动组件控制手指组件的向上移动和向下移动,三套手指组件向下移动时受滚轮的压缩而合拢,进而夹取结构与之相适配的被动结构;手指组件向上移动时四连杆机构联动,驱动手指组件张开,进而释放被动结构。本发明可用于空间机械
一种空间在轨重复锁紧释放机构.pdf
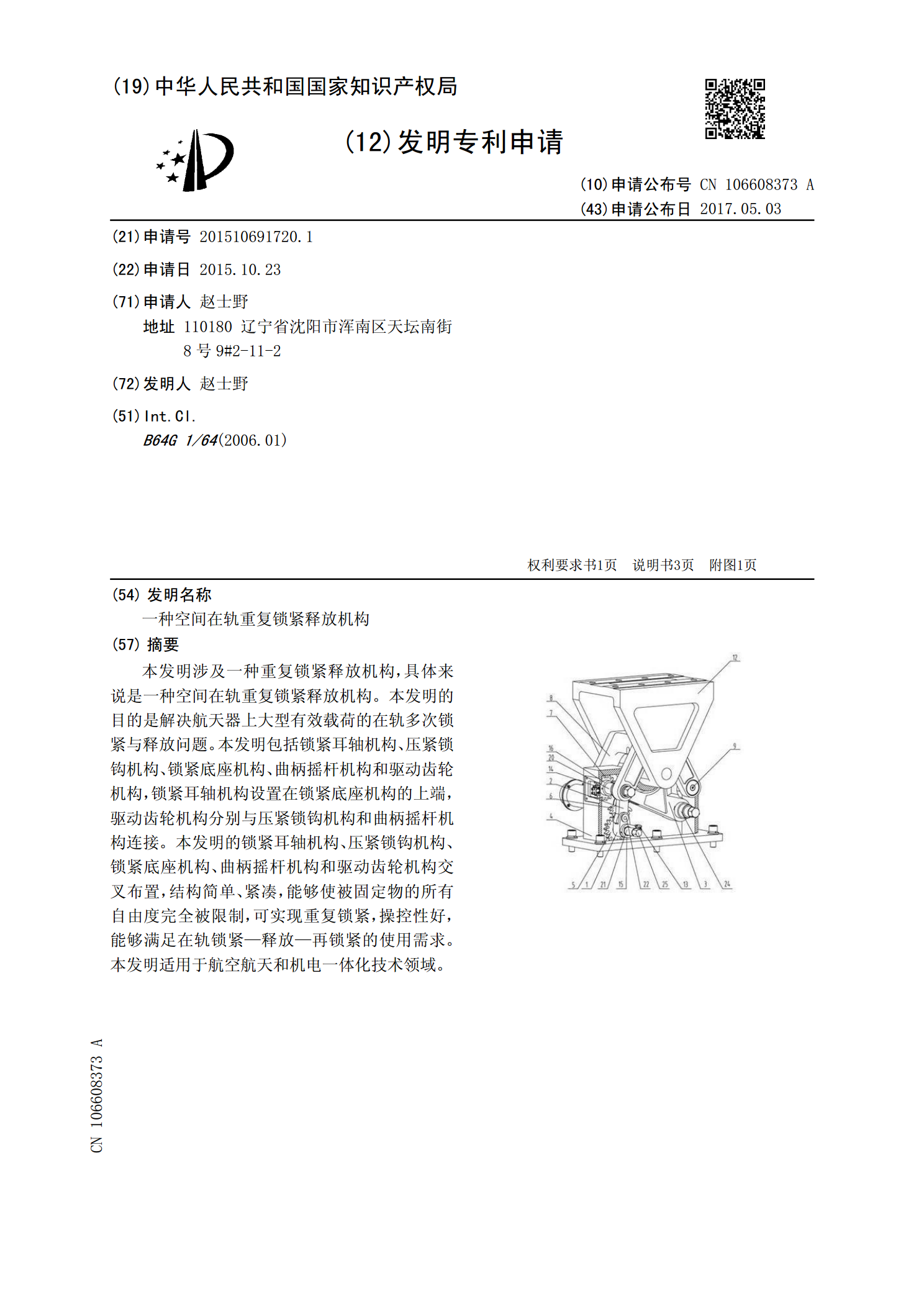
本发明涉及一种重复锁紧释放机构,具体来说是一种空间在轨重复锁紧释放机构。本发明的目的是解决航天器上大型有效载荷的在轨多次锁紧与释放问题。本发明包括锁紧耳轴机构、压紧锁钩机构、锁紧底座机构、曲柄摇杆机构和驱动齿轮机构,锁紧耳轴机构设置在锁紧底座机构的上端,驱动齿轮机构分别与压紧锁钩机构和曲柄摇杆机构连接。本发明的锁紧耳轴机构、压紧锁钩机构、锁紧底座机构、曲柄摇杆机构和驱动齿轮机构交叉布置,结构简单、紧凑,能够使被固定物的所有自由度完全被限制,可实现重复锁紧,操控性好,能够满足在轨锁紧—释放—再锁紧的使用需求
一种空间在轨重复锁紧释放机构.pdf
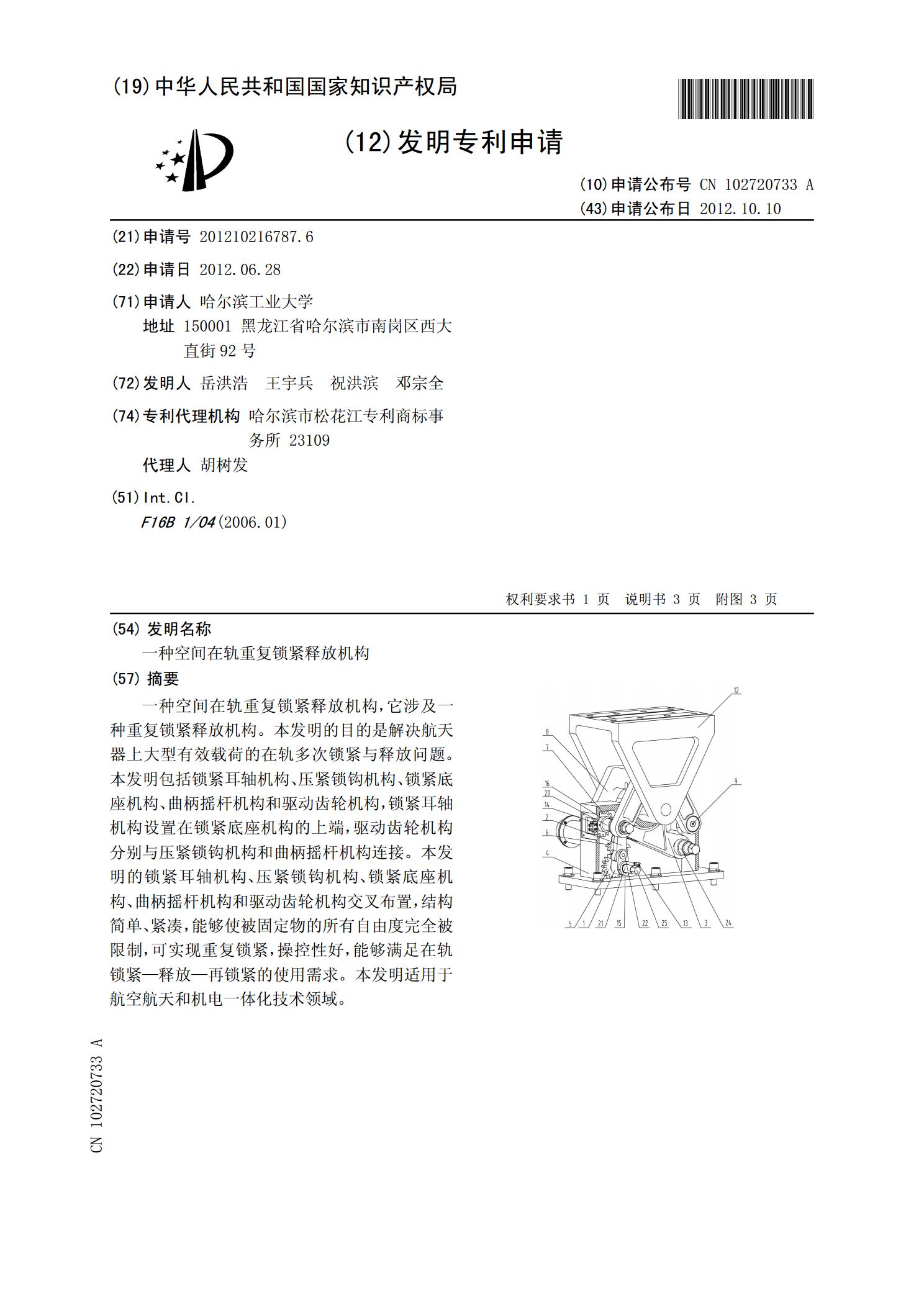
一种空间在轨重复锁紧释放机构,它涉及一种重复锁紧释放机构。本发明的目的是解决航天器上大型有效载荷的在轨多次锁紧与释放问题。本发明包括锁紧耳轴机构、压紧锁钩机构、锁紧底座机构、曲柄摇杆机构和驱动齿轮机构,锁紧耳轴机构设置在锁紧底座机构的上端,驱动齿轮机构分别与压紧锁钩机构和曲柄摇杆机构连接。本发明的锁紧耳轴机构、压紧锁钩机构、锁紧底座机构、曲柄摇杆机构和驱动齿轮机构交叉布置,结构简单、紧凑,能够使被固定物的所有自由度完全被限制,可实现重复锁紧,操控性好,能够满足在轨锁紧—释放—再锁紧的使用需求。本发明适用于
一种对接环捕获锁紧机构及捕获锁紧方法.pdf
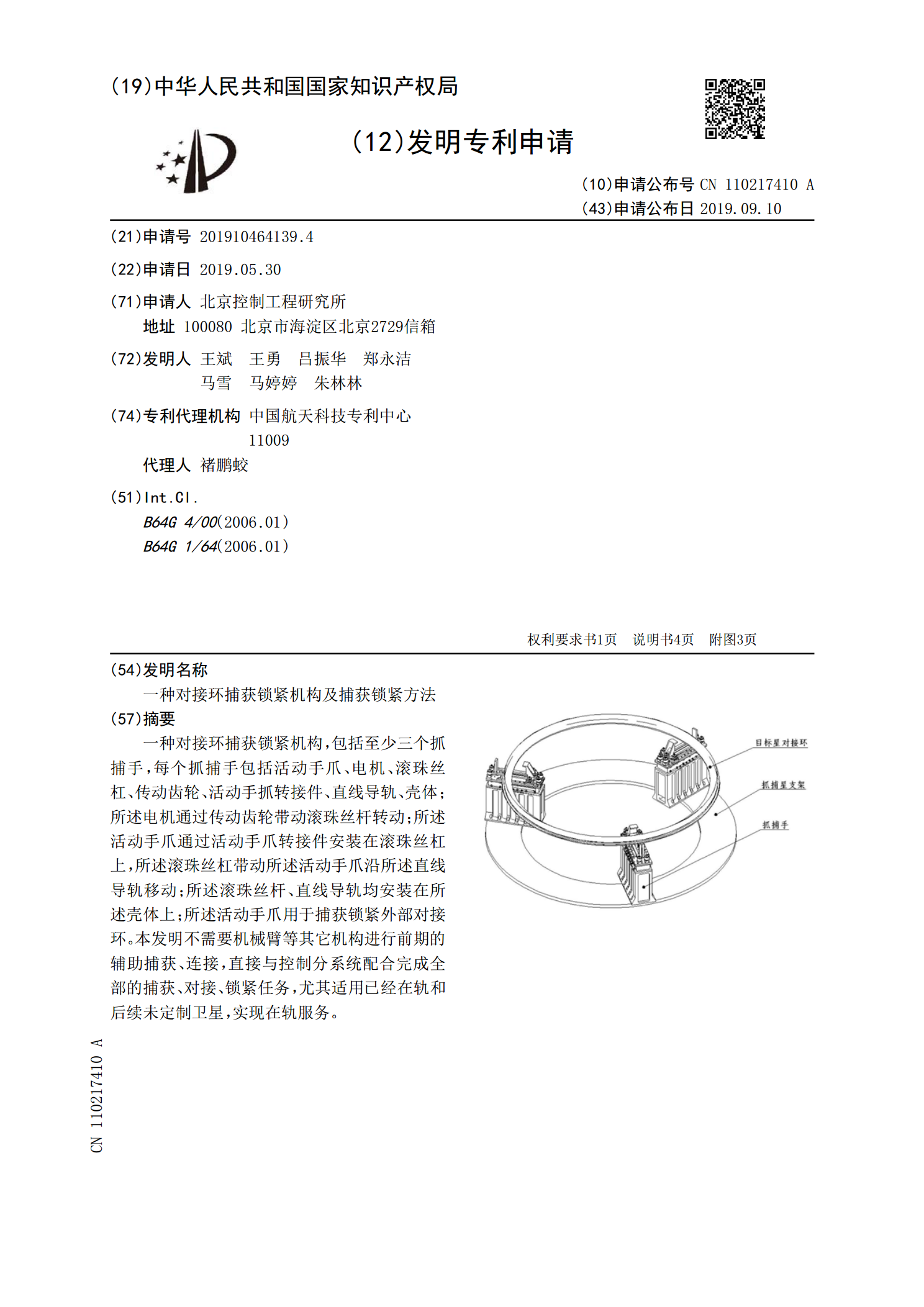
一种对接环捕获锁紧机构,包括至少三个抓捕手,每个抓捕手包括活动手爪、电机、滚珠丝杠、传动齿轮、活动手抓转接件、直线导轨、壳体;所述电机通过传动齿轮带动滚珠丝杆转动;所述活动手爪通过活动手爪转接件安装在滚珠丝杠上,所述滚珠丝杠带动所述活动手爪沿所述直线导轨移动;所述滚珠丝杆、直线导轨均安装在所述壳体上;所述活动手爪用于捕获锁紧外部对接环。本发明不需要机械臂等其它机构进行前期的辅助捕获、连接,直接与控制分系统配合完成全部的捕获、对接、锁紧任务,尤其适用已经在轨和后续未定制卫星,实现在轨服务。