
包含两个太阳齿轮和啮合间隙最小化的行星齿轮传动装置.pdf

猫巷****觅蓉

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
包含两个太阳齿轮和啮合间隙最小化的行星齿轮传动装置.pdf
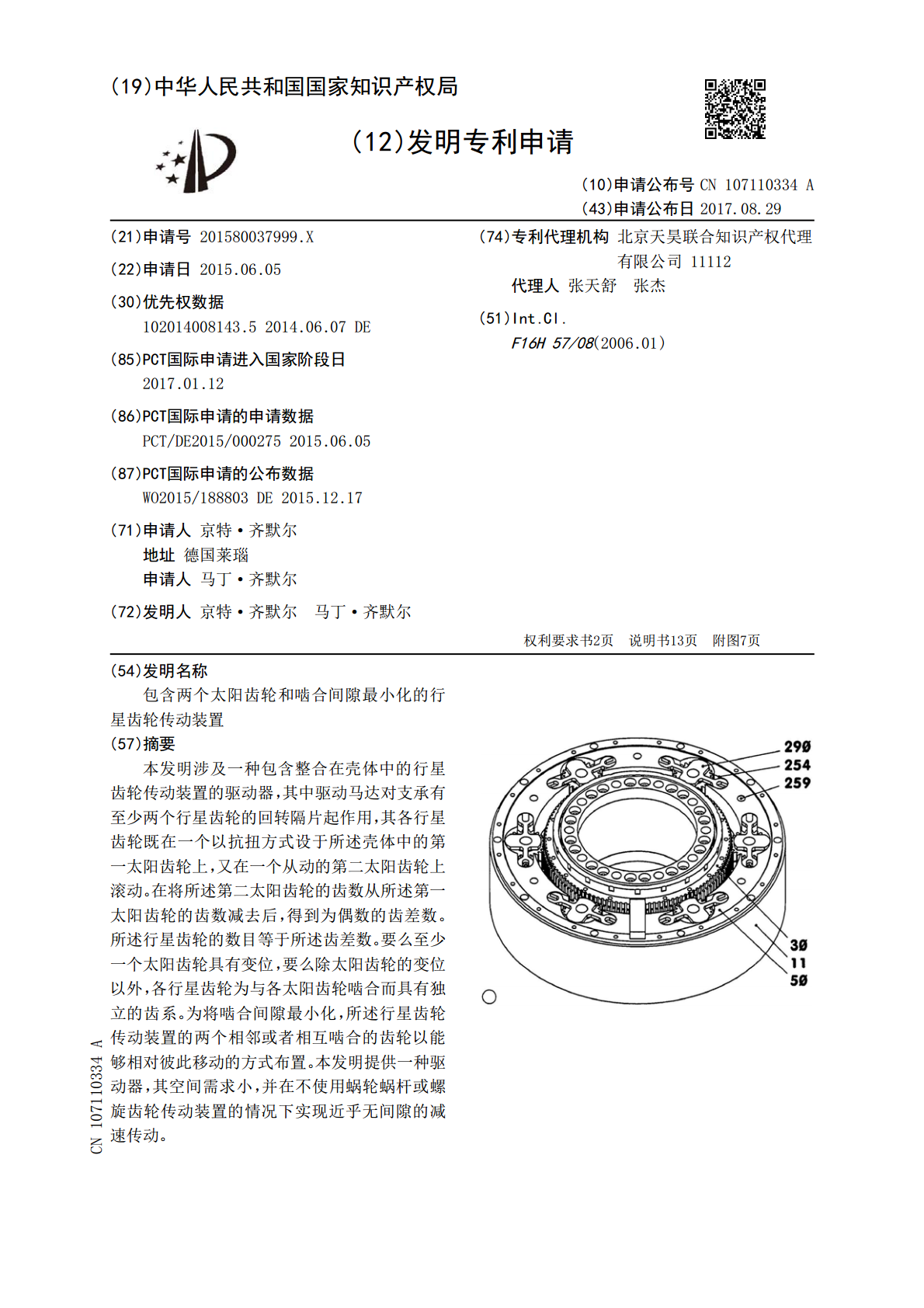
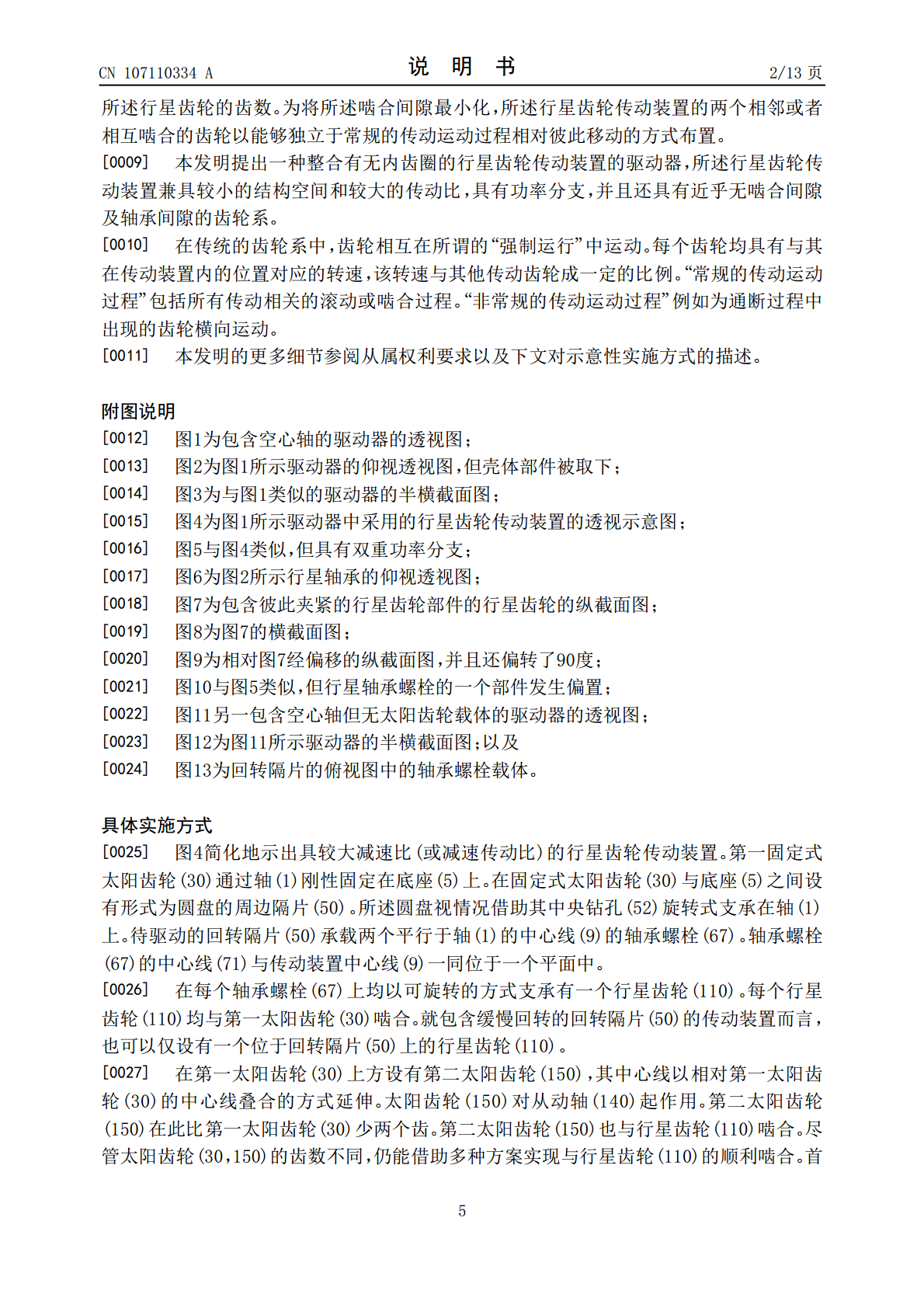
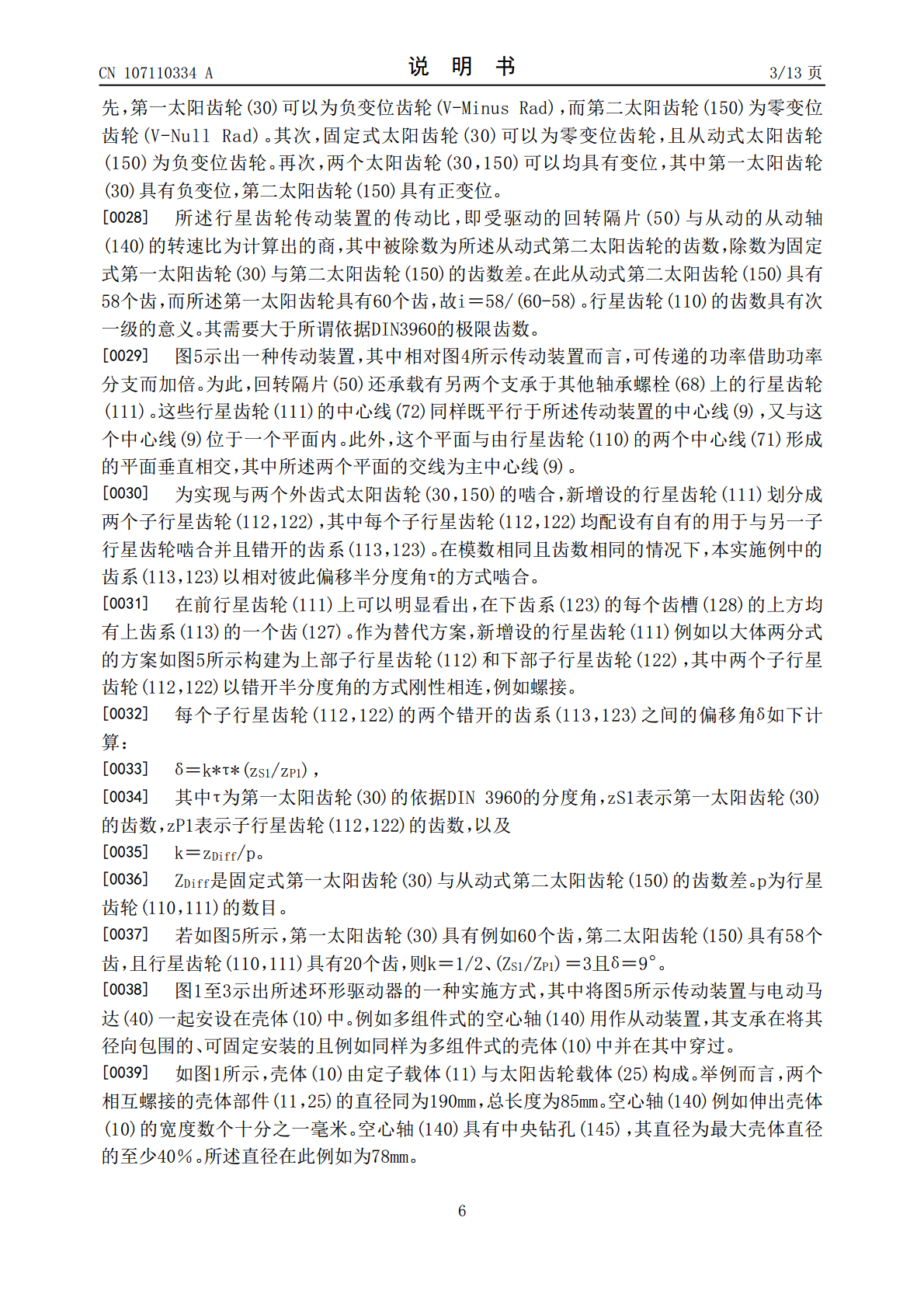
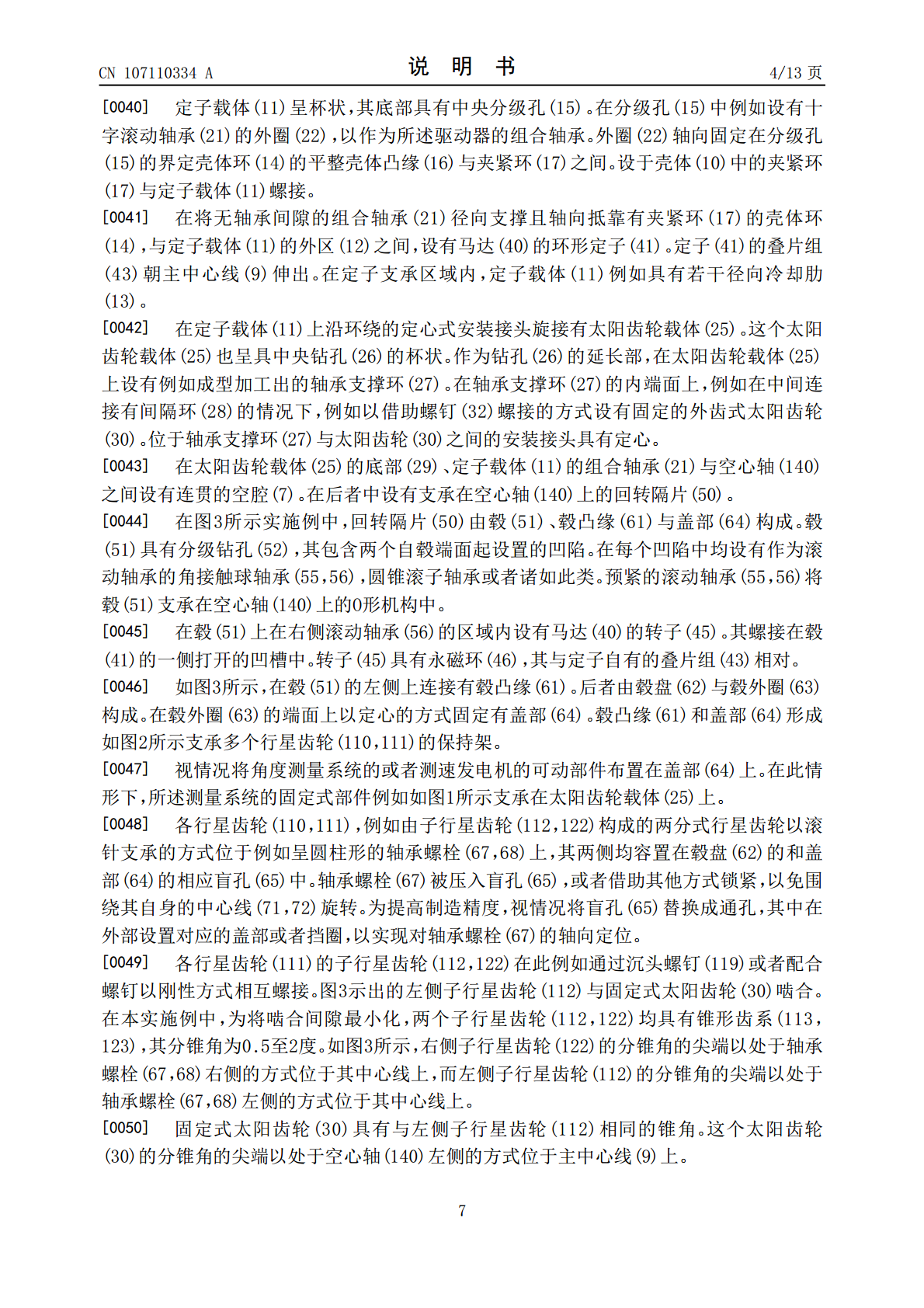
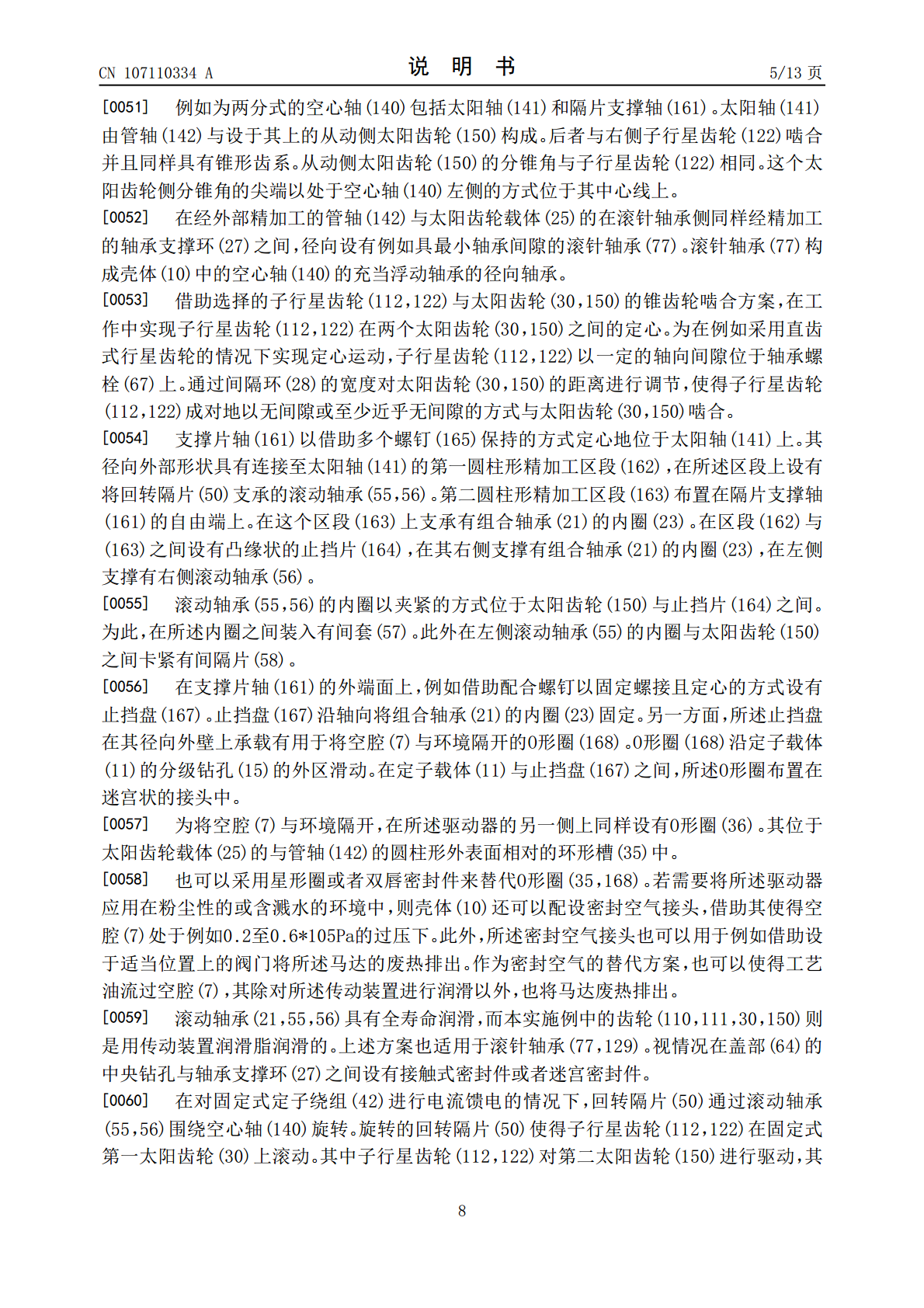
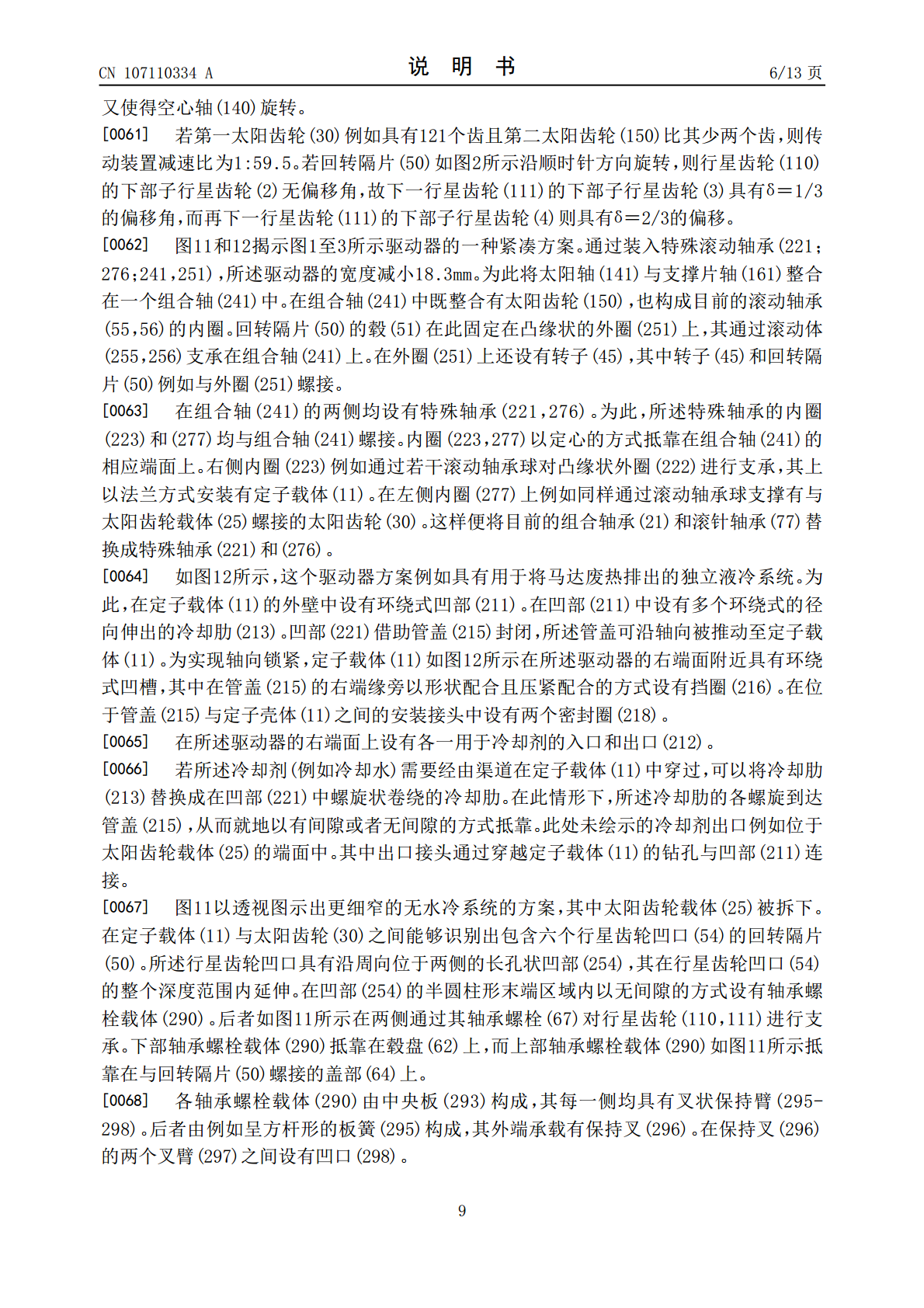
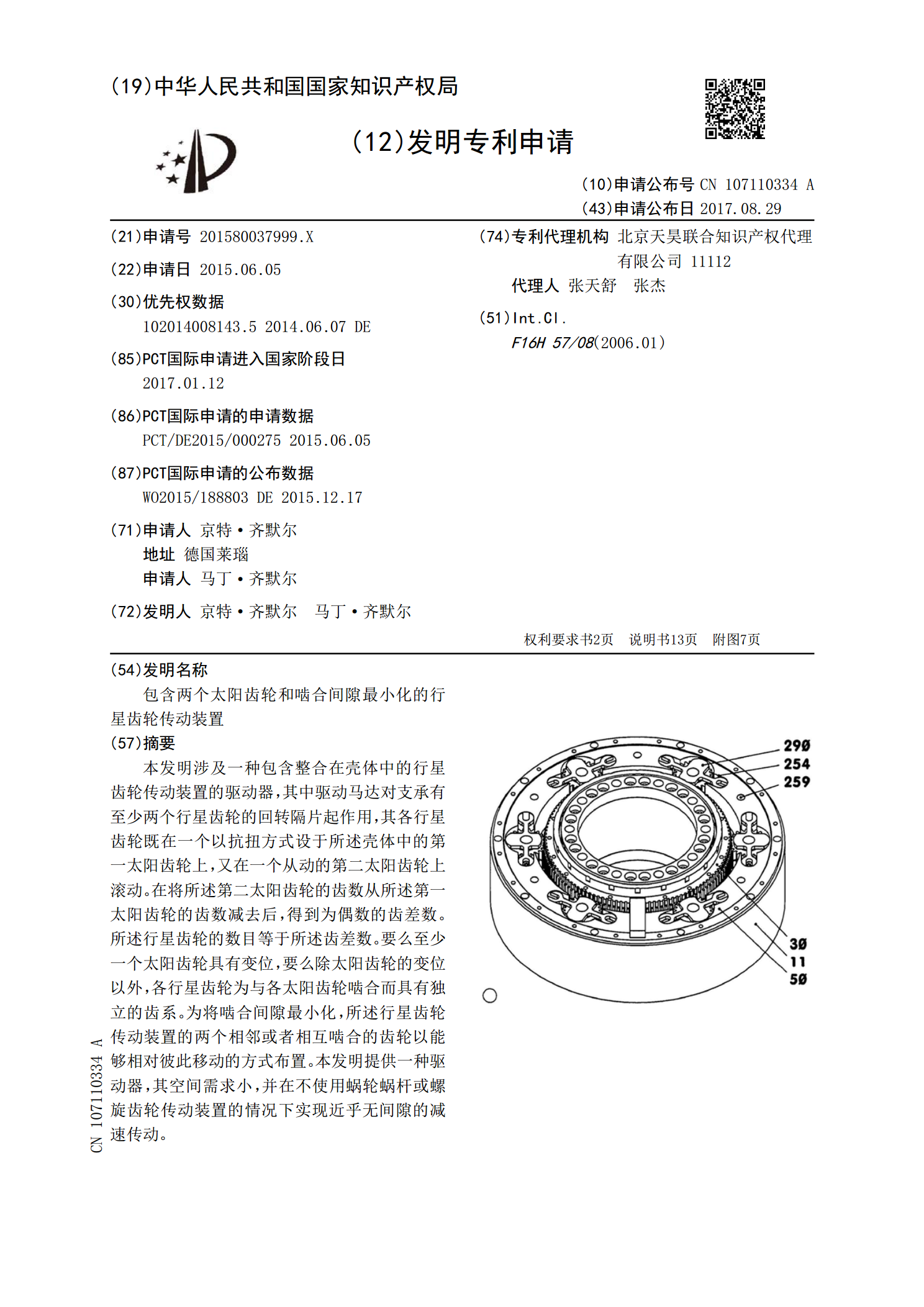
本发明涉及一种包含整合在壳体中的行星齿轮传动装置的驱动器,其中驱动马达对支承有至少两个行星齿轮的回转隔片起作用,其各行星齿轮既在一个以抗扭方式设于所述壳体中的第一太阳齿轮上,又在一个从动的第二太阳齿轮上滚动。在将所述第二太阳齿轮的齿数从所述第一太阳齿轮的齿数减去后,得到为偶数的齿差数。所述行星齿轮的数目等于所述齿差数。要么至少一个太阳齿轮具有变位,要么除太阳齿轮的变位以外,各行星齿轮为与各太阳齿轮啮合而具有独立的齿系。为将啮合间隙最小化,所述行星齿轮传动装置的两个相邻或者相互啮合的齿轮以能够相对彼此移动的
包含两个太阳齿轮的行星齿轮传动装置.pdf
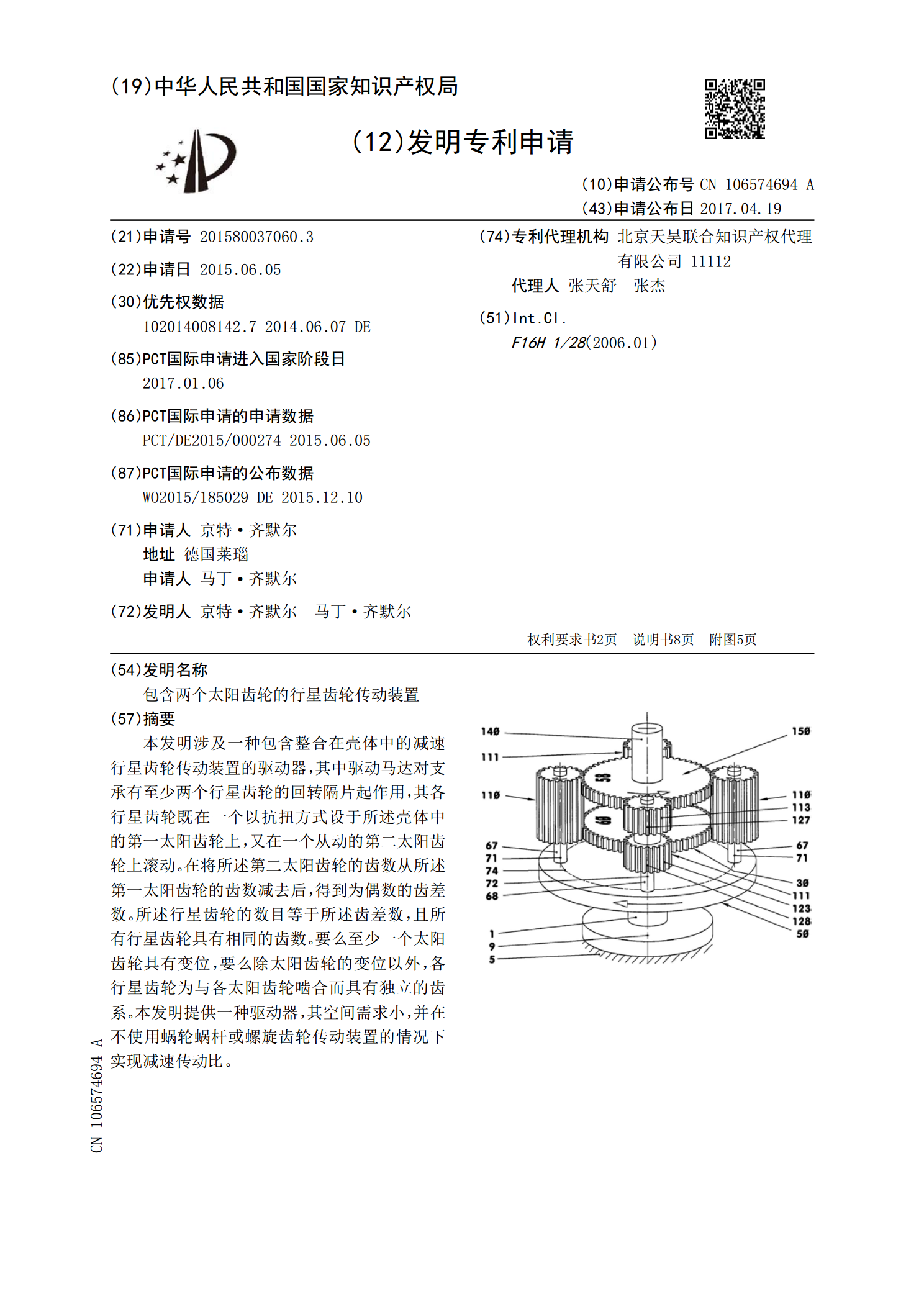
本发明涉及一种包含整合在壳体中的减速行星齿轮传动装置的驱动器,其中驱动马达对支承有至少两个行星齿轮的回转隔片起作用,其各行星齿轮既在一个以抗扭方式设于所述壳体中的第一太阳齿轮上,又在一个从动的第二太阳齿轮上滚动。在将所述第二太阳齿轮的齿数从所述第一太阳齿轮的齿数减去后,得到为偶数的齿差数。所述行星齿轮的数目等于所述齿差数,且所有行星齿轮具有相同的齿数。要么至少一个太阳齿轮具有变位,要么除太阳齿轮的变位以外,各行星齿轮为与各太阳齿轮啮合而具有独立的齿系。本发明提供一种驱动器,其空间需求小,并在不使用蜗轮蜗杆

行星齿轮传动装置、行星齿轮差速器和带有行星齿轮差速器的传动装置.pdf
本发明涉及一种具有至少两个行星齿轮传动级(20、30、40)的行星齿轮传动装置,其中每个行星齿轮传动级(20、30、40)分别由恒星齿轮(8、9、15)和至少一组行星齿轮(3、4、14)形成,其中,齿轮(3’,4’,8’,9’,14’,15’)在行星齿轮传动装置中相互齿啮合,使得在每个齿啮合中在由第一齿(21)形成的第一齿部(22)上的至少一个第一齿轮(21)形状配合地啮合到由第二齿(27)形成的第二齿部(24)的齿槽(23)中,并且在此,第一齿(21)利用第一齿面(25)在至少一个齿接触部(28)中碰触

齿轮和无间隙的齿轮传动装置.pdf
本发明涉及一种齿轮(1),该齿轮具有由一系列X个齿(4),其中,每隔N-1个齿(4)有一个齿至少部分地具有与其余X-N个齿(4)相比较小的齿刚度,N是选自下限为2和上限为X、特别是X/2的范围的数值;或者数量M的齿至少部分地具有小于其余X-M个齿的齿刚度,M选自下限为1以及上限为X-1的范围,或者上限为X,此时规定,至少个别齿构造成分体的或者所有的齿具有不同的几何形状,和/或齿部(3)具有这样的齿距,其中每隔N-1个齿(4)有一个齿相比于其余的X-N个齿(4)前置。

三齿轮板内啮合行星齿轮传动装置的设计与研究的中期报告.docx
三齿轮板内啮合行星齿轮传动装置的设计与研究的中期报告一、项目背景随着工业化的深入发展,机械传动技术的需求日益增长。行星齿轮传动作为一种重要的机械传动方式,其在机械制造领域发挥着重要作用。在行星齿轮传动中,常采用三齿轮板内啮合的传动形式,其传动效率高、稳定性好、扭矩传递能力强等优点,得到广泛应用。因此,本课题旨在探究三齿轮板内啮合行星齿轮传动装置的设计与研究,以提高其传动效率和可靠性,为机械制造领域的发展做出贡献。二、研究内容1.三齿轮板内啮合行星齿轮传动原理与优缺点的研究;2.传动机构的结构设计与分析;3