
一种里程计结合双天线差分GNSS的组合导航方法.pdf

一吃****春艳


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种里程计结合双天线差分GNSS的组合导航方法.pdf
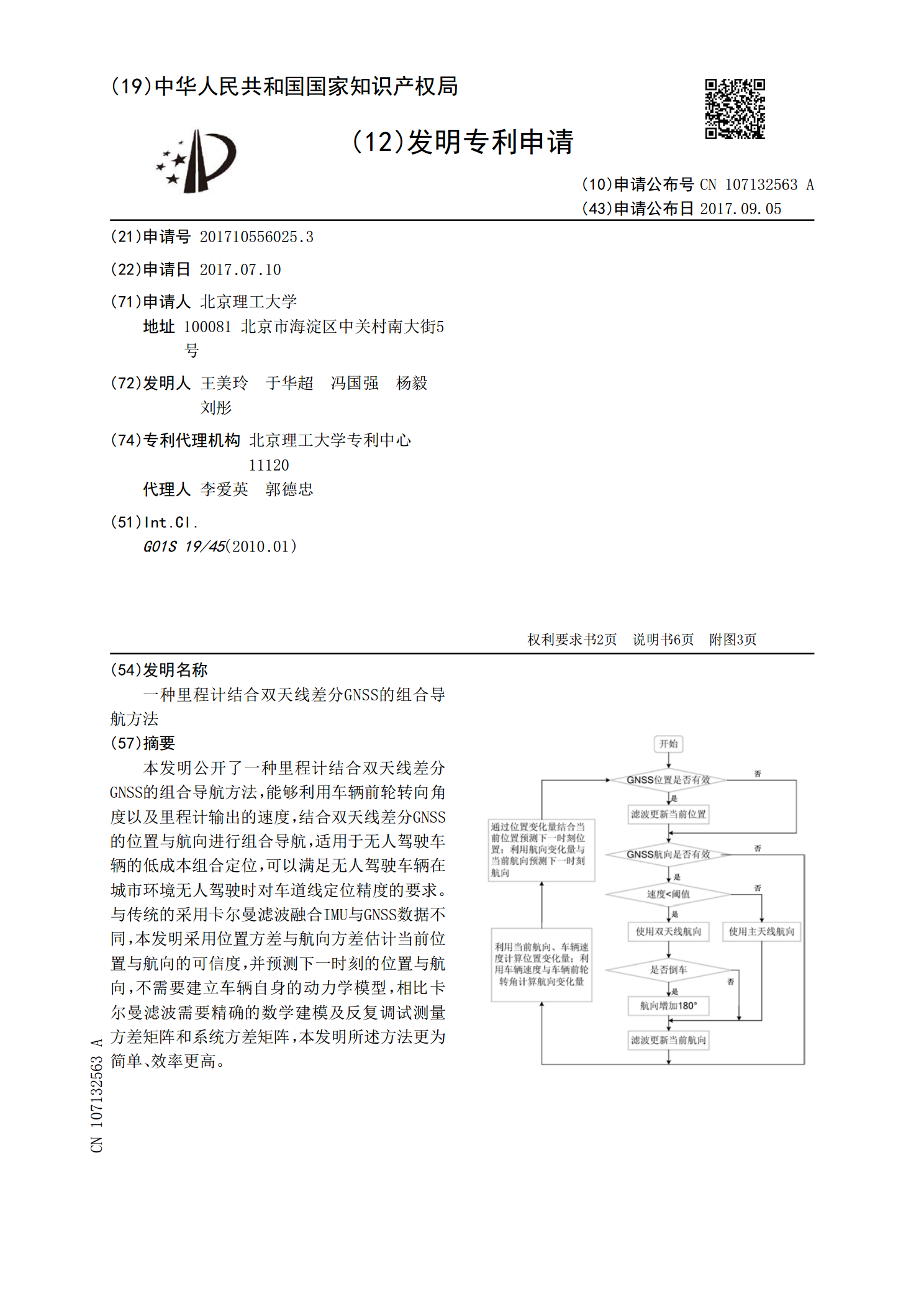
本发明公开了一种里程计结合双天线差分GNSS的组合导航方法,能够利用车辆前轮转向角度以及里程计输出的速度,结合双天线差分GNSS的位置与航向进行组合导航,适用于无人驾驶车辆的低成本组合定位,可以满足无人驾驶车辆在城市环境无人驾驶时对车道线定位精度的要求。与传统的采用卡尔曼滤波融合IMU与GNSS数据不同,本发明采用位置方差与航向方差估计当前位置与航向的可信度,并预测下一时刻的位置与航向,不需要建立车辆自身的动力学模型,相比卡尔曼滤波需要精确的数学建模及反复调试测量方差矩阵和系统方差矩阵,本发明所述方法更为

一种机载双天线GNSS和MINS组合导航系统及导航方法.pdf
本发明涉及导航技术领域,具体涉及一种机载双天线GNSS和MINS组合导航系统,包括惯性数据测量模块、机载双天线模块、姿态解算模块、误差补偿模块和计算模块,还包括GNSS信号分析模块和地面控制端,所述GNSS信号分析模块用于判断当前GNSS信号是否可用,若不可用,则向地面控制端发送当前GNSS信号不可用;所述地面控制端在接收到当前GNSS信号不可用后,调取当前机体所在位置的历史导航数据,并根据历史导航数据判断当前机体机载双天线模块是否发生故障,若是,则向GNSS信号分析模块发出故障信号。本发明可在机体接收不

一种基于差分GNSS的相对导航方法.pdf
本发明公开一种基于差分GNSS的相对导航方法,利用飞行器上安装的惯性测量器件对由于外力产生的两星相对机动加速度进行实时估计,并根据系统时间与GNSS的时间差对GNSS输出的相对位置信息进行补偿,得到当前时刻的测量值,同时利用绝对姿态确定输出的惯性系相对本体系四元数、以及目标星的轨道信息解算本体系、惯性系、目标星轨道系三者之间的转换关系,将加速度和相对位置信息统一到目标星轨道系下,最终采用卡尔曼滤波解算两星的相对位置,并设计数据跳变故障处理机制,根据卡尔曼滤波收敛后修正值的大小,对导航滤波的修正量进行限幅,
单天线GNSS和IMU组合导航的初始对准方法及装置.pdf
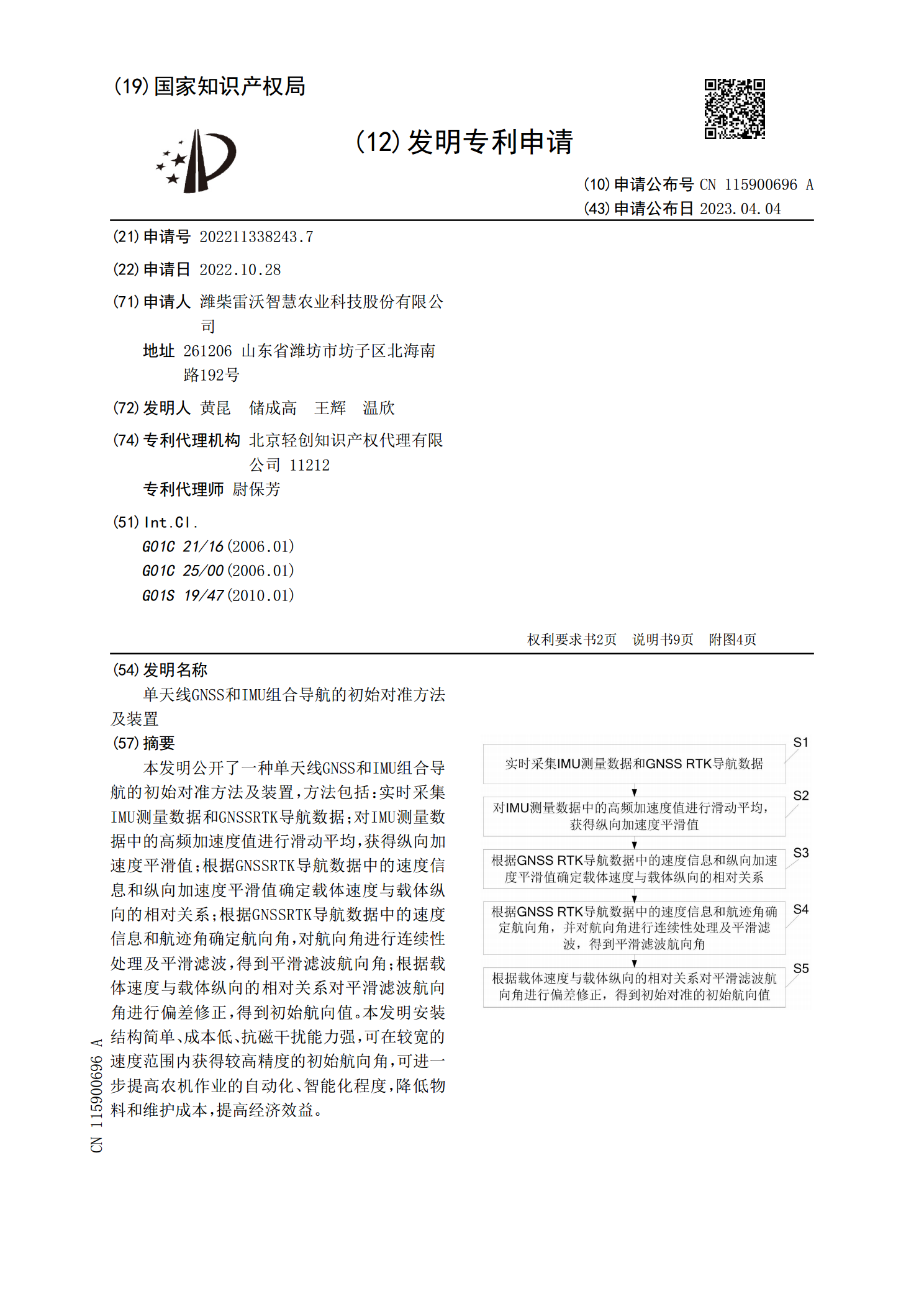
本发明公开了一种单天线GNSS和IMU组合导航的初始对准方法及装置,方法包括:实时采集IMU测量数据和GNSSRTK导航数据;对IMU测量数据中的高频加速度值进行滑动平均,获得纵向加速度平滑值;根据GNSSRTK导航数据中的速度信息和纵向加速度平滑值确定载体速度与载体纵向的相对关系;根据GNSSRTK导航数据中的速度信息和航迹角确定航向角,对航向角进行连续性处理及平滑滤波,得到平滑滤波航向角;根据载体速度与载体纵向的相对关系对平滑滤波航向角进行偏差修正,得到初始航向值。本发明安装结构简单、成本低、抗磁干扰

一种基于单基站空间差分的组合导航方法.pdf
本发明公开了一种基于单基站空间差分的组合导航方法,包括步骤Step1.在GNSS拒止条件下将基站和待组合系统的经度、纬度和高度信息转换为地心地固坐标系xyz坐标;Step2.计算基站与待组合系统经纬度之间的距离;Step3.基于单基站空间差分,构建待组合系统误差与测距系统误差的方程;Step4.解算获取待组合系统的定位误差;Step5.将定位误差转换为经纬度误差,获取误差的协方差矩阵;Step6.基于惯性导航的误差传播模型,嵌入观测协方差矩阵估计待组合系统误差,实现组合导航;本方法通过引入惯性导航信息,能