
单天线GNSS和IMU组合导航的初始对准方法及装置.pdf

睿达****的的

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
单天线GNSS和IMU组合导航的初始对准方法及装置.pdf
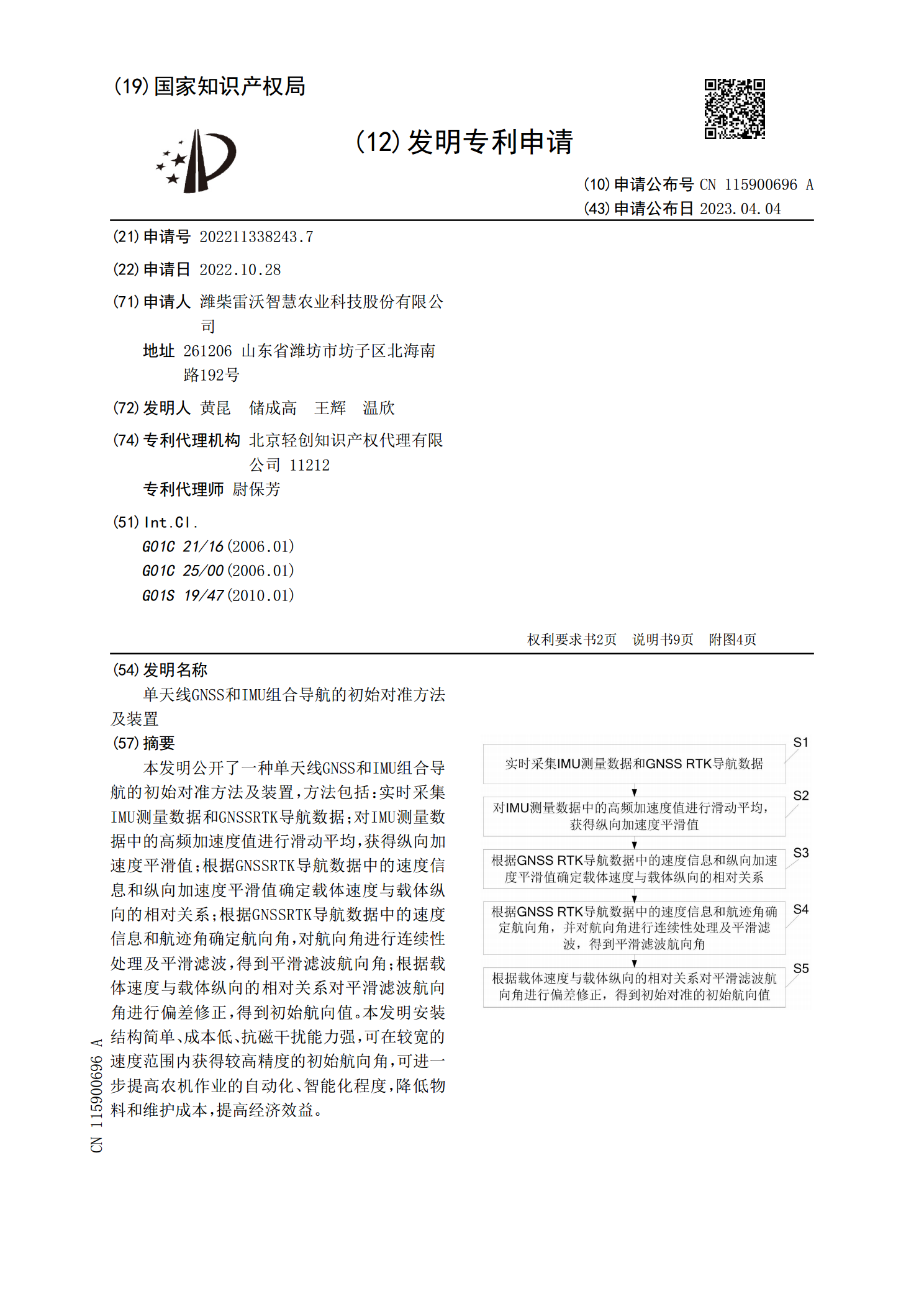
本发明公开了一种单天线GNSS和IMU组合导航的初始对准方法及装置,方法包括:实时采集IMU测量数据和GNSSRTK导航数据;对IMU测量数据中的高频加速度值进行滑动平均,获得纵向加速度平滑值;根据GNSSRTK导航数据中的速度信息和纵向加速度平滑值确定载体速度与载体纵向的相对关系;根据GNSSRTK导航数据中的速度信息和航迹角确定航向角,对航向角进行连续性处理及平滑滤波,得到平滑滤波航向角;根据载体速度与载体纵向的相对关系对平滑滤波航向角进行偏差修正,得到初始航向值。本发明安装结构简单、成本低、抗磁干扰

卡尔曼滤波与组合导航原理—初始对准.ppt
卡尔曼滤波与组合导航原理TheoryofKalmanFilterandIntegratedNavigation第五章卡尔曼滤波在惯性导航初始对准中的应用参考坐标系参考坐标系参考坐标系参考坐标系参考坐标系参考坐标系实现惯导要解决的几个问题一、惯导系统初始对准概述一、惯导系统初始对准概述一、惯导系统初始对准概述初始对准一、惯导系统初始对准概述初始对准的发展第五章卡尔曼滤波在惯性导航初始对准中的应用二、惯导系统的静基座初始对准方法二、惯导系统的静基座初始对准方法二、惯导系统的静基座初始对准方法二、惯导系统的静基
卫星导航辅助SINS进行初始方位对准的方法及装置.pdf
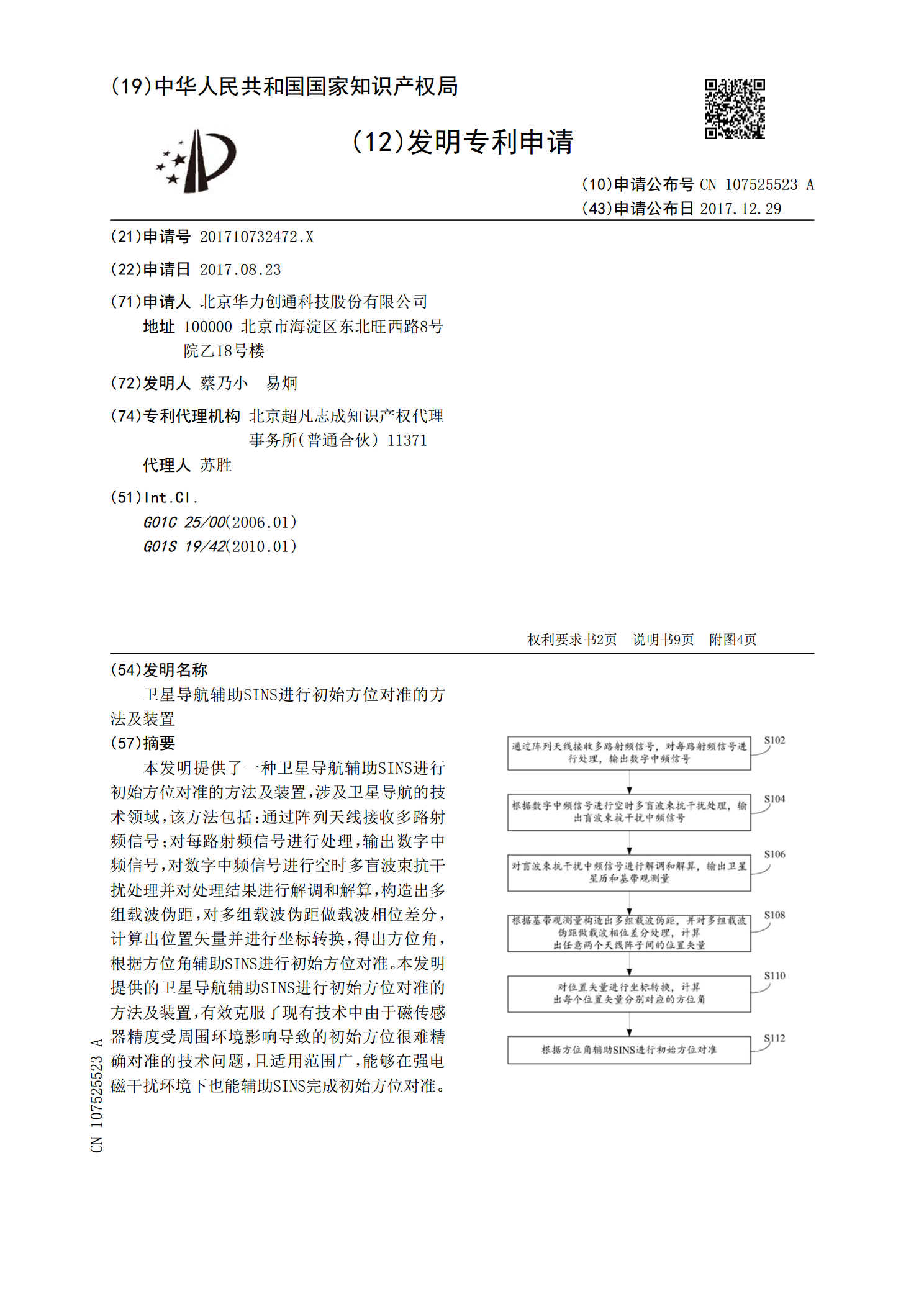
本发明提供了一种卫星导航辅助SINS进行初始方位对准的方法及装置,涉及卫星导航的技术领域,该方法包括:通过阵列天线接收多路射频信号;对每路射频信号进行处理,输出数字中频信号,对数字中频信号进行空时多盲波束抗干扰处理并对处理结果进行解调和解算,构造出多组载波伪距,对多组载波伪距做载波相位差分,计算出位置矢量并进行坐标转换,得出方位角,根据方位角辅助SINS进行初始方位对准。本发明提供的卫星导航辅助SINS进行初始方位对准的方法及装置,有效克服了现有技术中由于磁传感器精度受周围环境影响导致的初始方位很难精确对

一种机载双天线GNSS和MINS组合导航系统及导航方法.pdf
本发明涉及导航技术领域,具体涉及一种机载双天线GNSS和MINS组合导航系统,包括惯性数据测量模块、机载双天线模块、姿态解算模块、误差补偿模块和计算模块,还包括GNSS信号分析模块和地面控制端,所述GNSS信号分析模块用于判断当前GNSS信号是否可用,若不可用,则向地面控制端发送当前GNSS信号不可用;所述地面控制端在接收到当前GNSS信号不可用后,调取当前机体所在位置的历史导航数据,并根据历史导航数据判断当前机体机载双天线模块是否发生故障,若是,则向GNSS信号分析模块发出故障信号。本发明可在机体接收不

GNSSINS组合导航系统初始对准及其故障修复研究.pptx
GNSSINS组合导航系统初始对准及其故障修复研究目录GNSSINS组合导航系统概述定义和组成工作原理和特点应用领域GNSSINS组合导航系统初始对准技术初始对准的必要性初始对准的方法和流程算法优化和改进GNSSINS组合导航系统故障修复技术故障诊断和分类故障修复方法和流程故障预防和预测GNSSINS组合导航系统性能评估评估指标和方法实验验证和分析结果比较和讨论GNSSINS组合导航系统未来发展展望技术发展趋势和挑战未来发展方向和重点跨领域合作和创新感谢观看