
基于激光位移传感器的车轮不圆度检测装置及方法.pdf

猫巷****永安


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于激光位移传感器的车轮不圆度检测装置及方法.pdf
本发明公开了一种基于激光位移传感器的车轮不圆度检测装置及方法。该装置包括槽型钢轨、处理中心和多个激光位移传感器,其中激光位移传感器与处理中心连接,槽型钢轨为只保留凹槽部分的钢轨;槽型钢轨的外侧依次安放激光位移传感器,感测头排列在车轮下方的同一水平线上,沿着槽型钢轨向上测量,探测光束同时到达车轮边缘且与车轮直径所在的圆周共面。方法为:激光位移传感器探测车轮得到的测量点,先进行坐标变换以及数据融合,然后用最小二乘拟合法得到多组车轮的拟合圆的直径,用最大值减去最小值得到车轮不圆度。本发明对车轮不圆度进行在线非接

基于激光传感器的城轨车辆车轮不圆度检测装置及方法.pdf
本发明公开了一种基于激光传感器的城轨车辆车轮不圆度检测装置及方法。该装置包括中央处理单元和多个激光传感器,所述激光传感器均与中央处理单元连接;检测区段的钢轨向外偏移,且该检测区段的钢轨内侧设置护轨;激光传感器设置于钢轨偏移所空出的区域与护轨之间,激光传感器的探头沿钢轨方向排列且均位于车轮下方,所有激光传感器与进行不圆度测量的车轮圆周共面。该方法使用多个激光传感器,将其按照一定几何关系安装在车轮下方,传感器同时探测车轮得到探测点,通过最小二乘拟合得到的直径,而后对车轮整个圆周内的直径分段求均值后用最大值减去
车轮不圆度检测方法及装置.pdf
本发明提供一种车轮不圆度检测方法及装置,在确定列车运行过程中噪声的主频声压级后,根据保存声压级与车轮不圆度的对应关系的拟合函数,进一步确定出主频声压级对应的车轮不圆度。该过程中,通过在车辆运行的过程中对车内噪声进行检测,根据噪声检测状况判断车轮不圆度,实现不影响车辆正常运行的同时降低检测成本的目的。

基于激光位移传感器的城轨车轮参数测量装置及方法.pdf
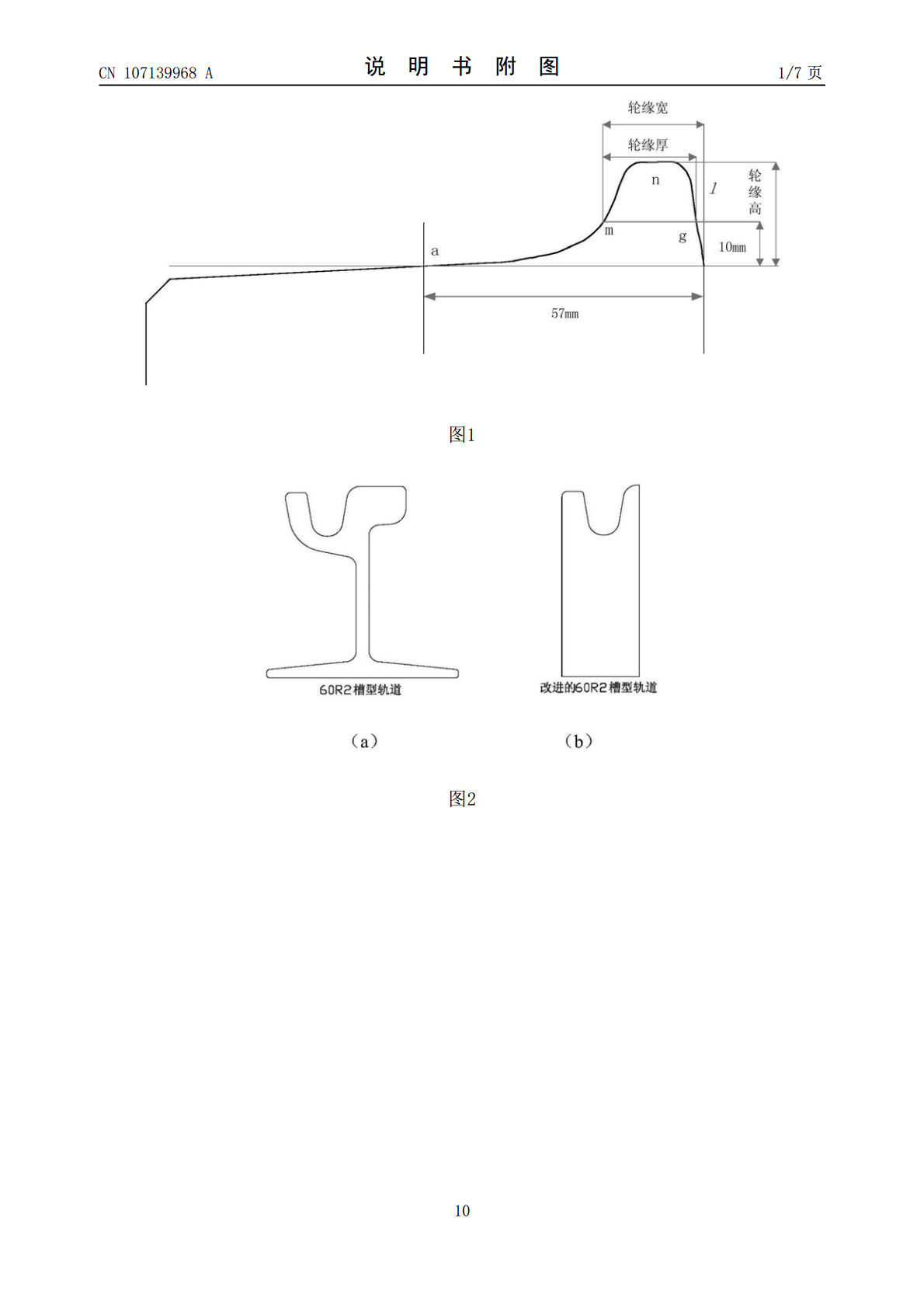
本发明公开了一种基于激光位移传感器的城轨车轮参数测量装置及方法。该测量装置包括轮缘踏面测量模块、ARM嵌入式主控模块、交互模块、数据存储模块、USB通信模块和电源模块。轮缘踏面测量模块使用激光位移传感器检测车轮踏面坐标,ARM嵌入式主控模块对检测到的踏面坐标进行曲线拟合从而得到车轮轮廓曲线,然后通过几何关系计算得到轮缘高、轮缘厚、车轮直径等车轮参数,交互模块显示车轮轮廓曲线与车轮参数,存储模块保存测量数据与车轮参数,上位机通过USB通信模块可以获取车轮参数并进行进一步分析,电源模块为整个测量装置供电。本发
基于列阵激光的有轨电车车轮不圆度在线检测装置及方法.pdf
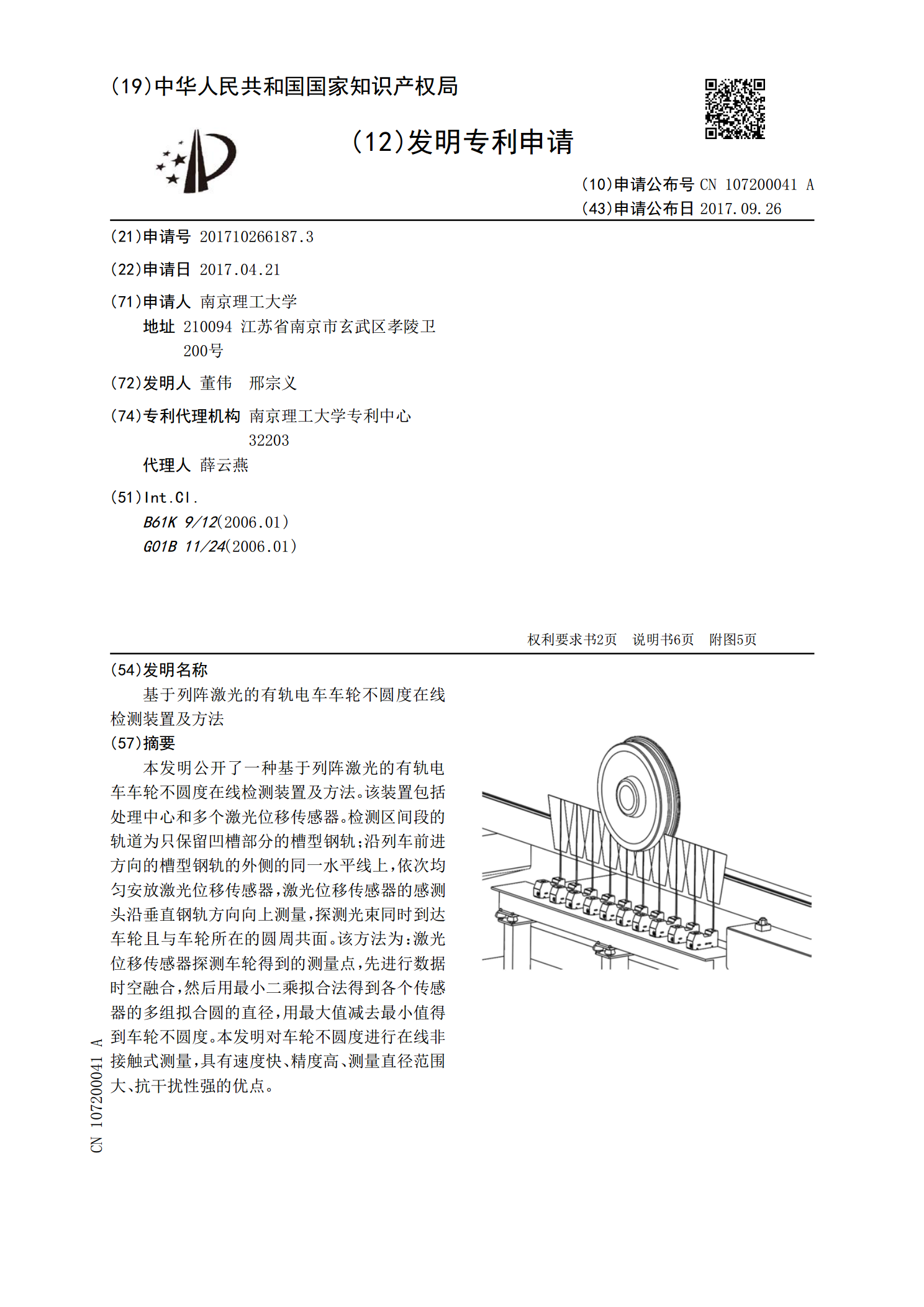
本发明公开了一种基于列阵激光的有轨电车车轮不圆度在线检测装置及方法。该装置包括处理中心和多个激光位移传感器。检测区间段的轨道为只保留凹槽部分的槽型钢轨;沿列车前进方向的槽型钢轨的外侧的同一水平线上,依次均匀安放激光位移传感器,激光位移传感器的感测头沿垂直钢轨方向向上测量,探测光束同时到达车轮且与车轮所在的圆周共面。该方法为:激光位移传感器探测车轮得到的测量点,先进行数据时空融合,然后用最小二乘拟合法得到各个传感器的多组拟合圆的直径,用最大值减去最小值得到车轮不圆度。本发明对车轮不圆度进行在线非接触式测量,