
一种城轨列车受电弓滑板厚度在线检测装置及方法.pdf

子安****吖吖

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种城轨列车受电弓滑板厚度在线检测装置及方法.pdf
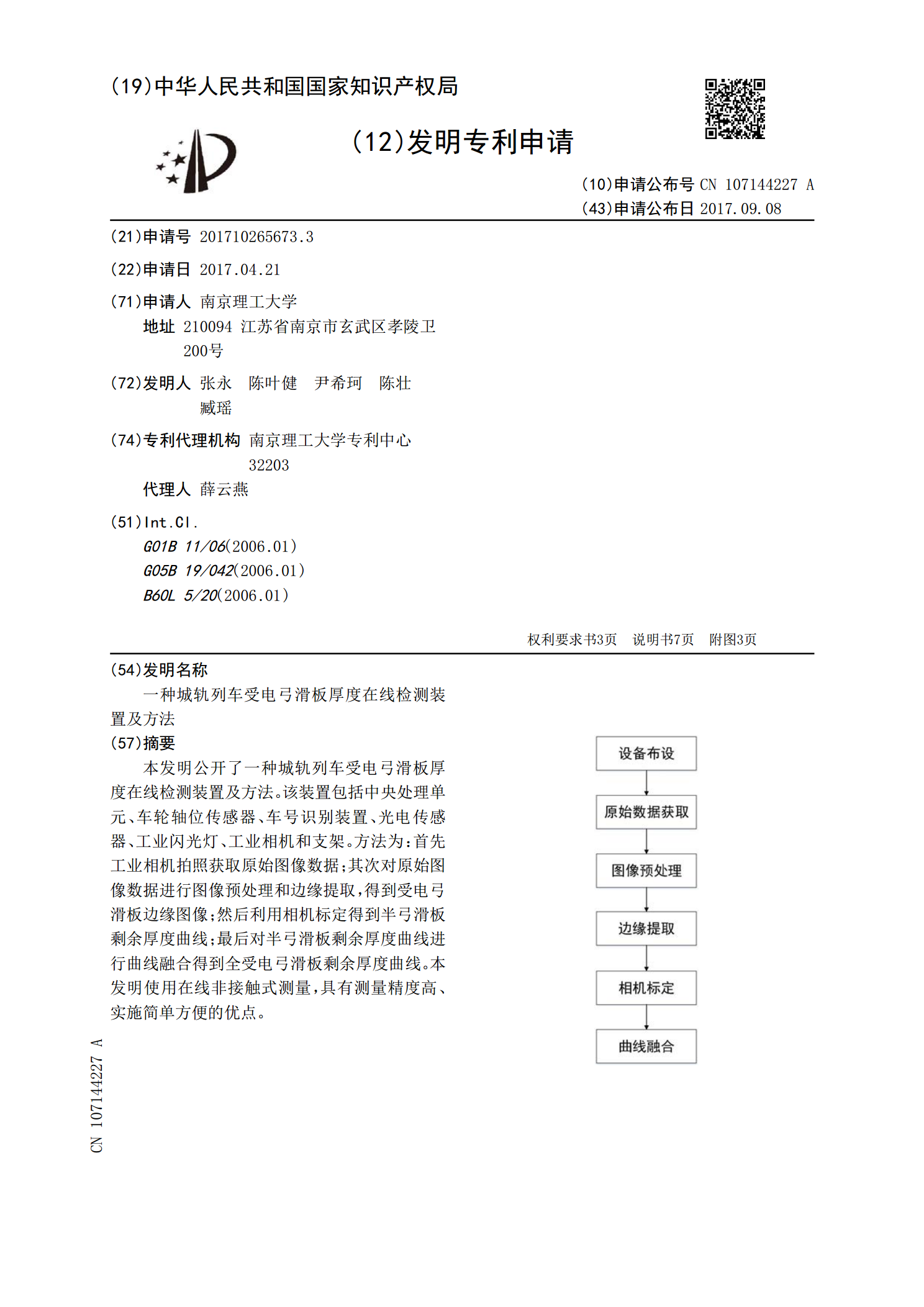
本发明公开了一种城轨列车受电弓滑板厚度在线检测装置及方法。该装置包括中央处理单元、车轮轴位传感器、车号识别装置、光电传感器、工业闪光灯、工业相机和支架。方法为:首先工业相机拍照获取原始图像数据;其次对原始图像数据进行图像预处理和边缘提取,得到受电弓滑板边缘图像;然后利用相机标定得到半弓滑板剩余厚度曲线;最后对半弓滑板剩余厚度曲线进行曲线融合得到全受电弓滑板剩余厚度曲线。本发明使用在线非接触式测量,具有测量精度高、实施简单方便的优点。
城轨列车受电弓在线检测装置与方法.pdf
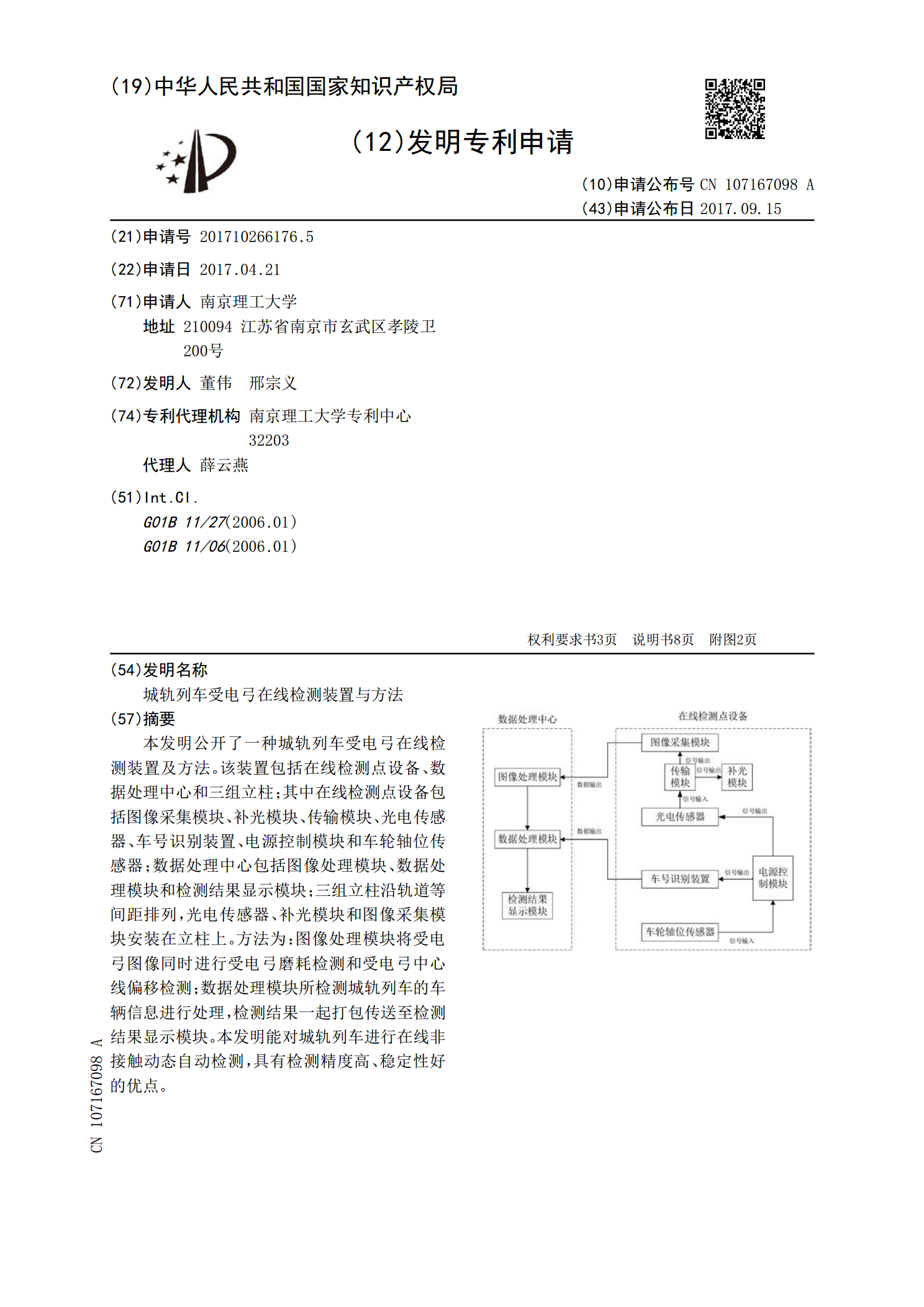
本发明公开了一种城轨列车受电弓在线检测装置及方法。该装置包括在线检测点设备、数据处理中心和三组立柱;其中在线检测点设备包括图像采集模块、补光模块、传输模块、光电传感器、车号识别装置、电源控制模块和车轮轴位传感器;数据处理中心包括图像处理模块、数据处理模块和检测结果显示模块;三组立柱沿轨道等间距排列,光电传感器、补光模块和图像采集模块安装在立柱上。方法为:图像处理模块将受电弓图像同时进行受电弓磨耗检测和受电弓中心线偏移检测;数据处理模块所检测城轨列车的车辆信息进行处理,检测结果一起打包传送至检测结果显示模块

一种城轨列车受电弓中心线偏移在线检测装置及方法.pdf
本发明公开了一种城轨列车受电弓中心线偏移在线检测装置及方法。该装置包括中央处理单元、车轮轴位传感器、车号识别天线、光电传感器、工业闪光灯、工业相机和支架。方法为:工业相机获取受电弓前、后侧面图像,车号识别天线获取当前所检测列车车号信息;将获取的受电弓前、后侧面图像进行滤除电磁干扰处理;然后进行边缘提取,得到受电弓边缘和接触线边缘;采用基于梯度方向的离散Hough变换算法和模板匹配算法得到接触点坐标;进行羊角定位,并提取羊角边界点,得到受电弓中心线位置;通过相机标定的方法,获取工业相机的内参数和外参数,从而
一种城轨列车受电弓故障监测装置及方法.pdf
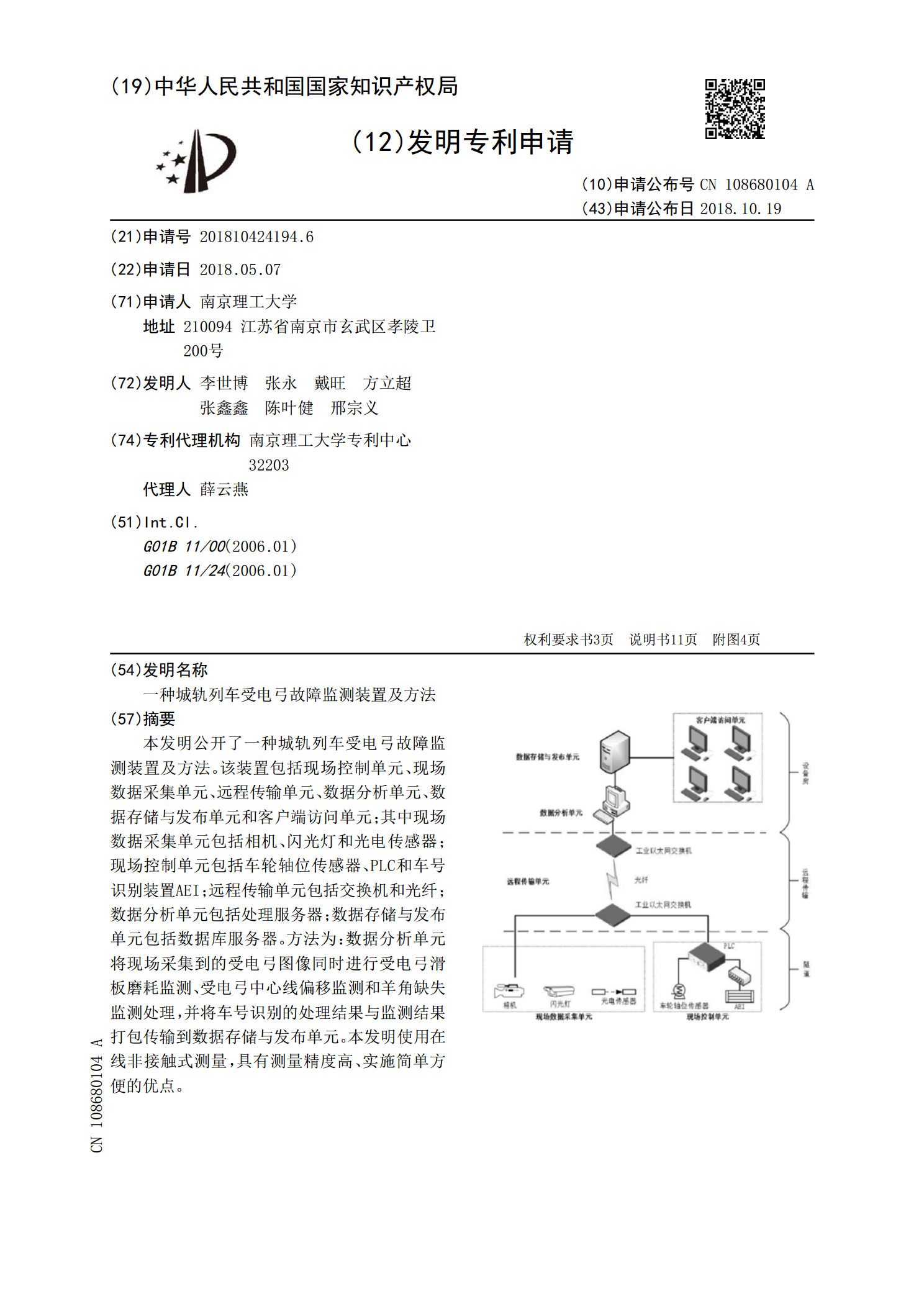
本发明公开了一种城轨列车受电弓故障监测装置及方法。该装置包括现场控制单元、现场数据采集单元、远程传输单元、数据分析单元、数据存储与发布单元和客户端访问单元;其中现场数据采集单元包括相机、闪光灯和光电传感器;现场控制单元包括车轮轴位传感器、PLC和车号识别装置AEI;远程传输单元包括交换机和光纤;数据分析单元包括处理服务器;数据存储与发布单元包括数据库服务器。方法为:数据分析单元将现场采集到的受电弓图像同时进行受电弓滑板磨耗监测、受电弓中心线偏移监测和羊角缺失监测处理,并将车号识别的处理结果与监测结果打包传
一种基于图像的受电弓滑板磨耗在线检测装置与方法.pdf
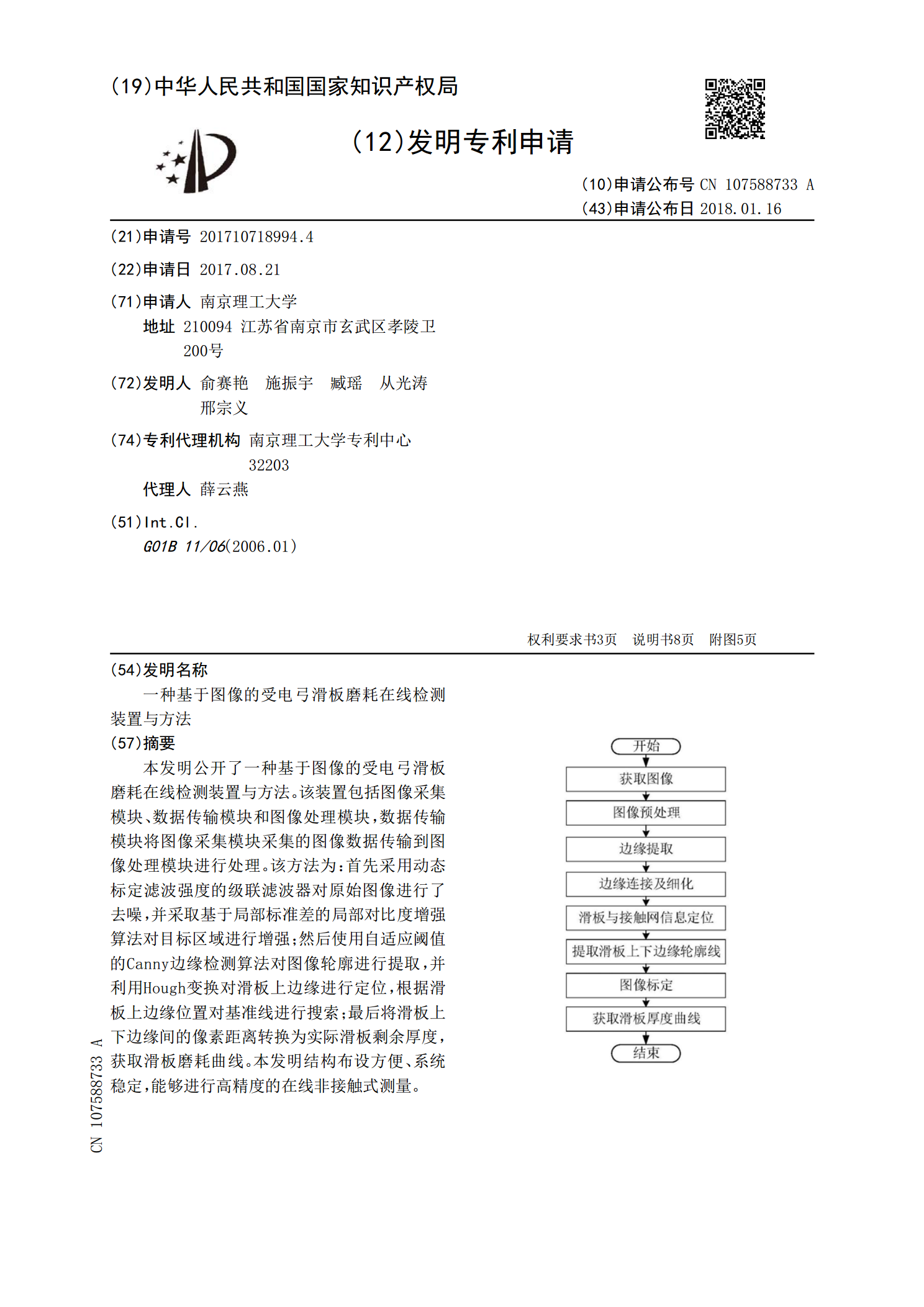
本发明公开了一种基于图像的受电弓滑板磨耗在线检测装置与方法。该装置包括图像采集模块、数据传输模块和图像处理模块,数据传输模块将图像采集模块采集的图像数据传输到图像处理模块进行处理。该方法为:首先采用动态标定滤波强度的级联滤波器对原始图像进行了去噪,并采取基于局部标准差的局部对比度增强算法对目标区域进行增强;然后使用自适应阈值的Canny边缘检测算法对图像轮廓进行提取,并利用Hough变换对滑板上边缘进行定位,根据滑板上边缘位置对基准线进行搜索;最后将滑板上下边缘间的像素距离转换为实际滑板剩余厚度,获取滑板