
自适应变胞履带行驶机构.pdf

秋花****姐姐

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自适应变胞履带行驶机构.pdf
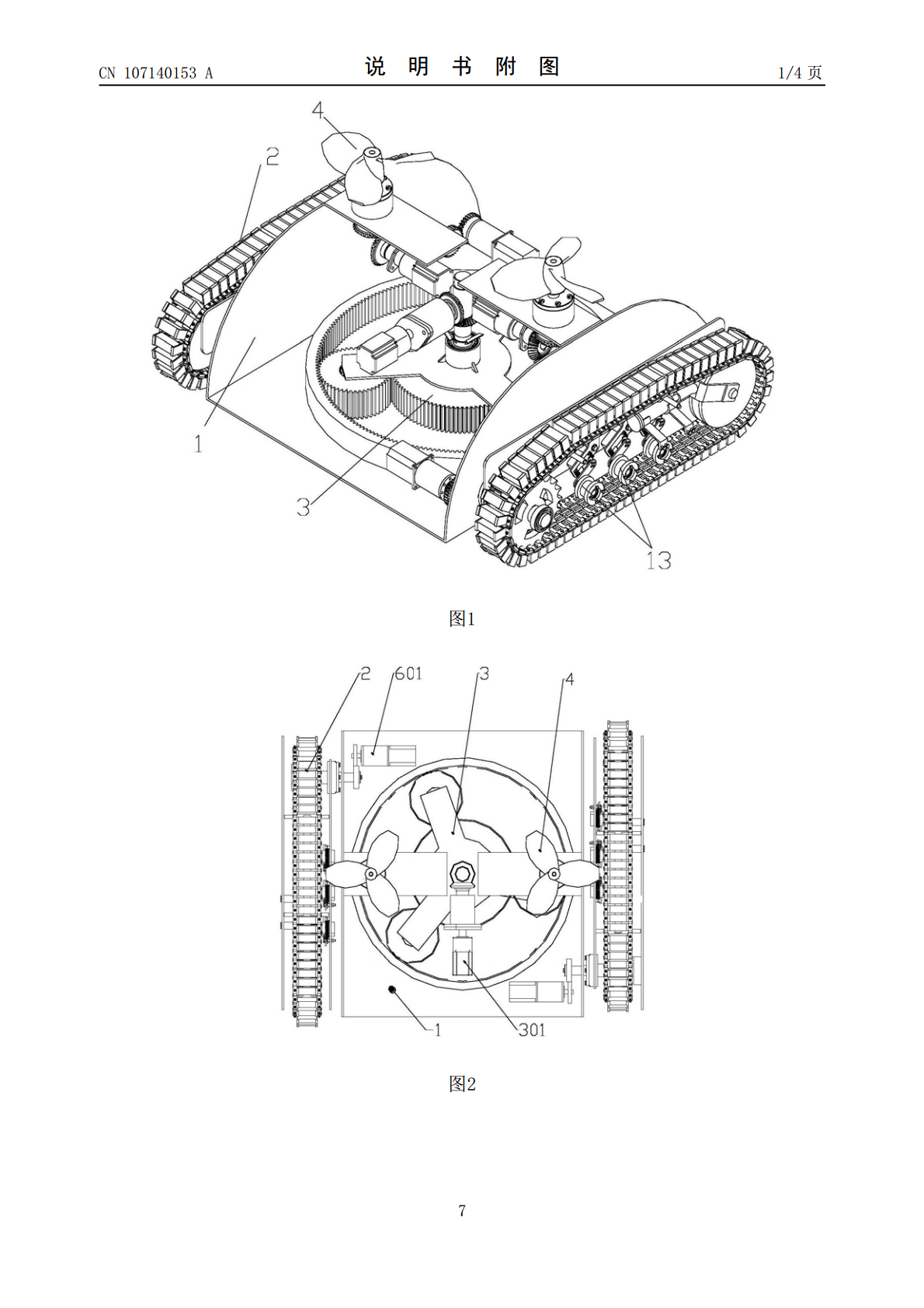
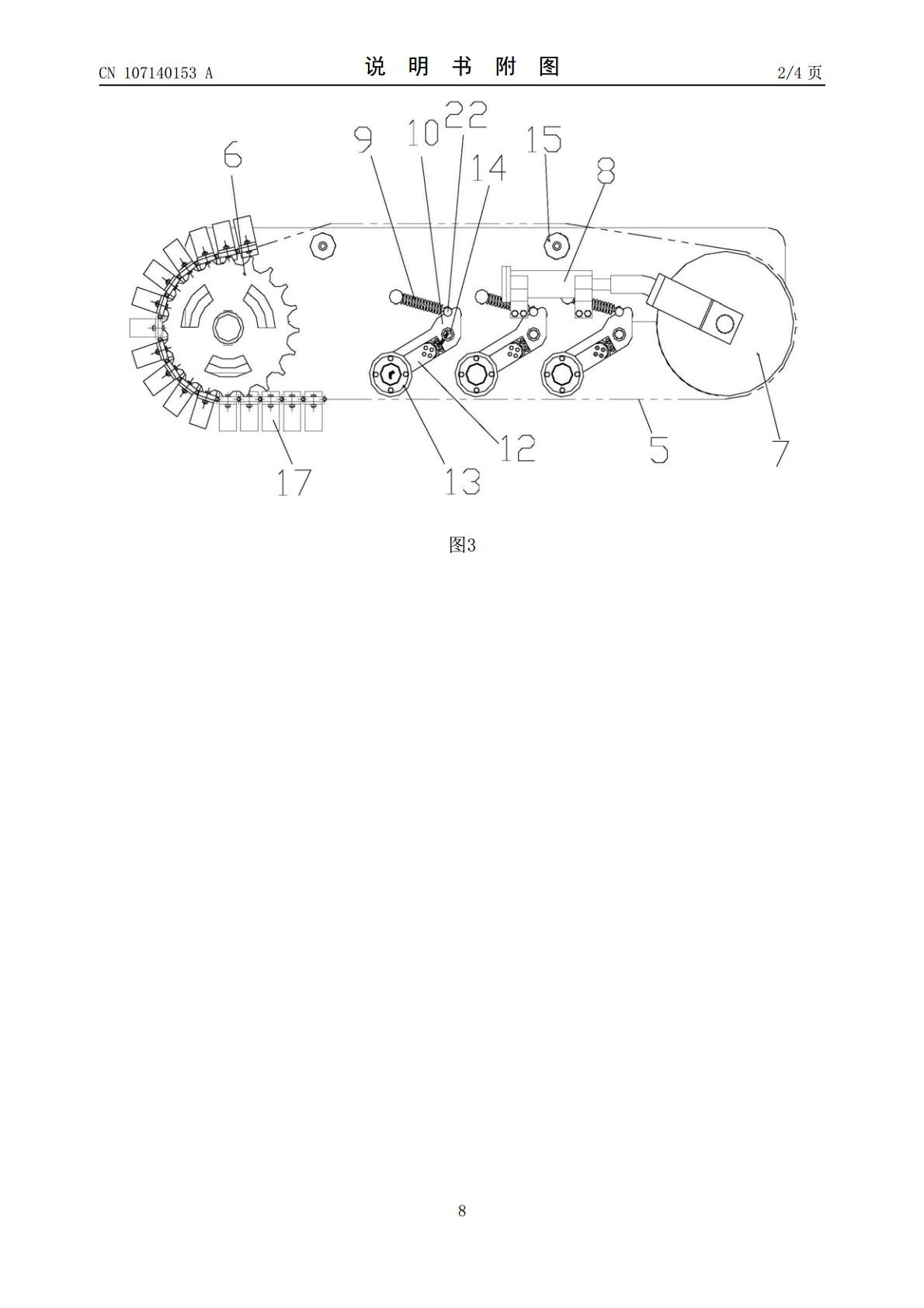
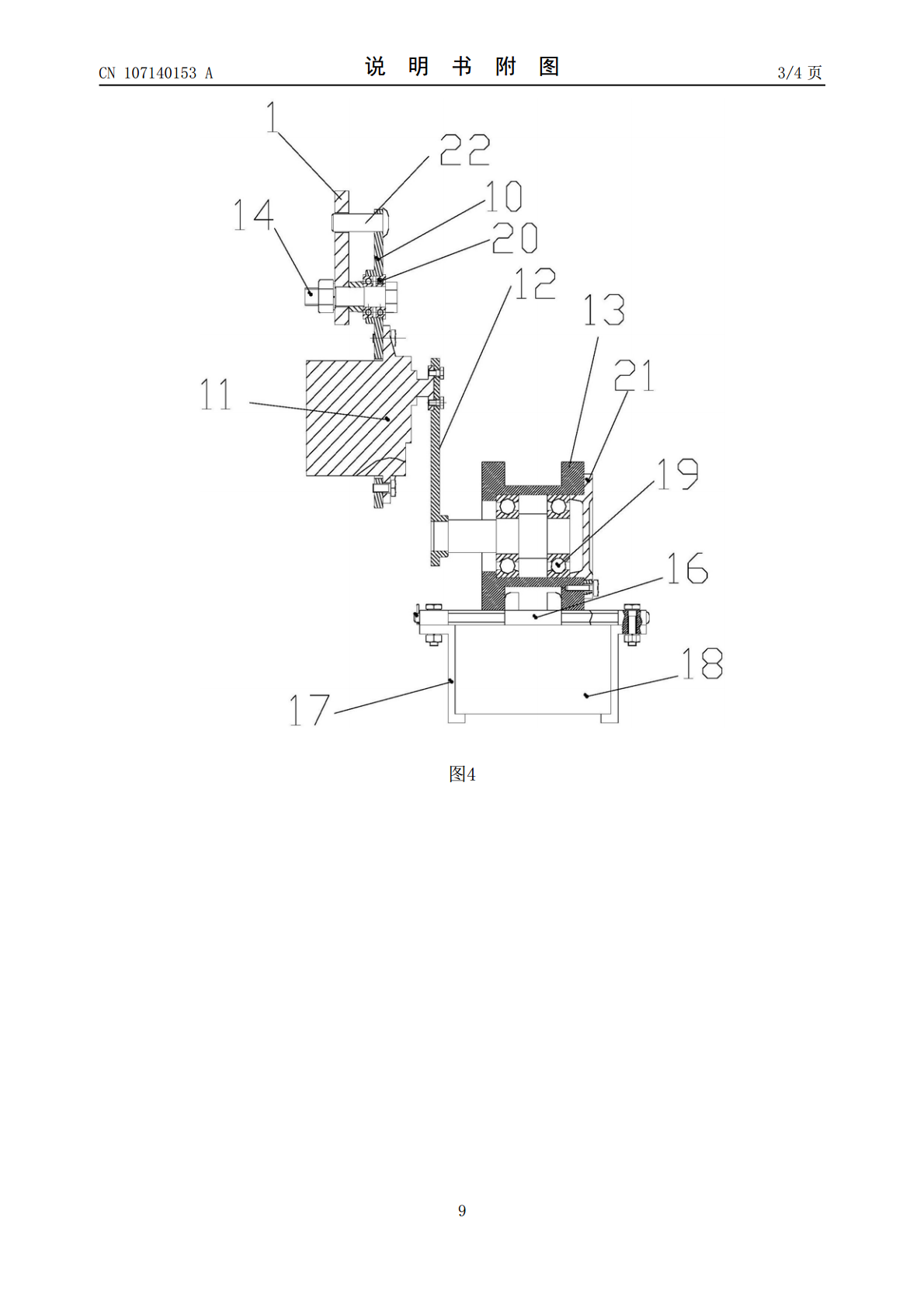
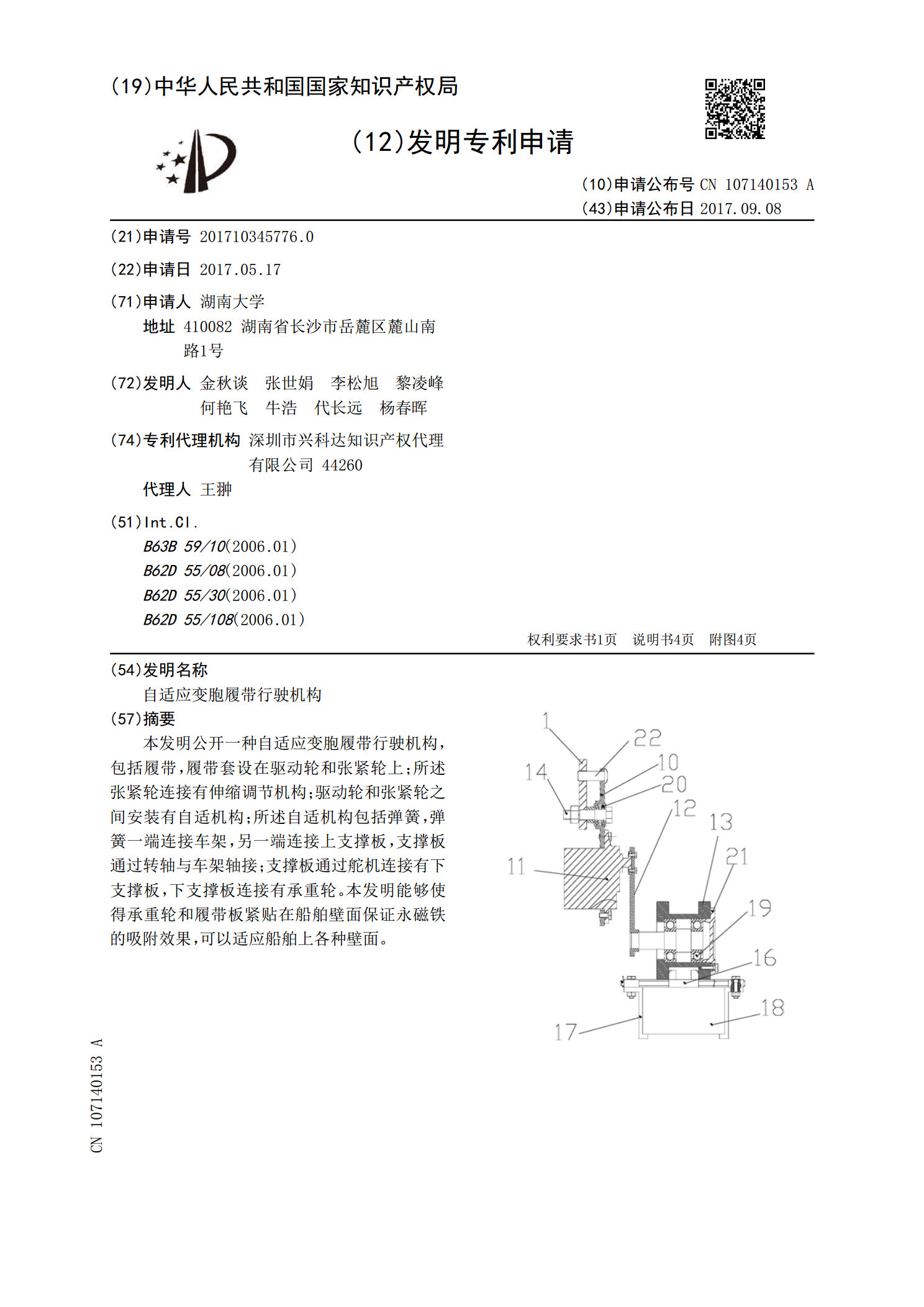
本发明公开一种自适应变胞履带行驶机构,包括履带,履带套设在驱动轮和张紧轮上;所述张紧轮连接有伸缩调节机构;驱动轮和张紧轮之间安装有自适机构;所述自适机构包括弹簧,弹簧一端连接车架,另一端连接上支撑板,支撑板通过转轴与车架轴接;支撑板通过舵机连接有下支撑板,下支撑板连接有承重轮。本发明能够使得承重轮和履带板紧贴在船舶壁面保证永磁铁的吸附效果,可以适应船舶上各种壁面。

用于履带行驶机构的履带链.pdf
一种履带行驶机构,其带有由可彼此相对旋转地联结的底盘(15)构成的、无端的并且为了其驱动经由所驱动的、具有至少一个齿圈(11)的扣链轮(10)来引导的履带链,其中,每个单个的底盘(15)分别具有至少一个链节(16),其带有在履带链的行进方向上取向的链节侧沿(17),并且链节(16)设立成在履带链在扣链轮(10)上运转时接合到构造在布置在扣链轮(10)的周缘上的、径向伸出的齿(12)之间的凹口(13)中,其特征在于,底盘(15)借助于布置在其之间的、使底盘(15)能够彼此相对平行移动的至少一个连接板(19)
自适应弯扭变胞水果采摘装置.pdf
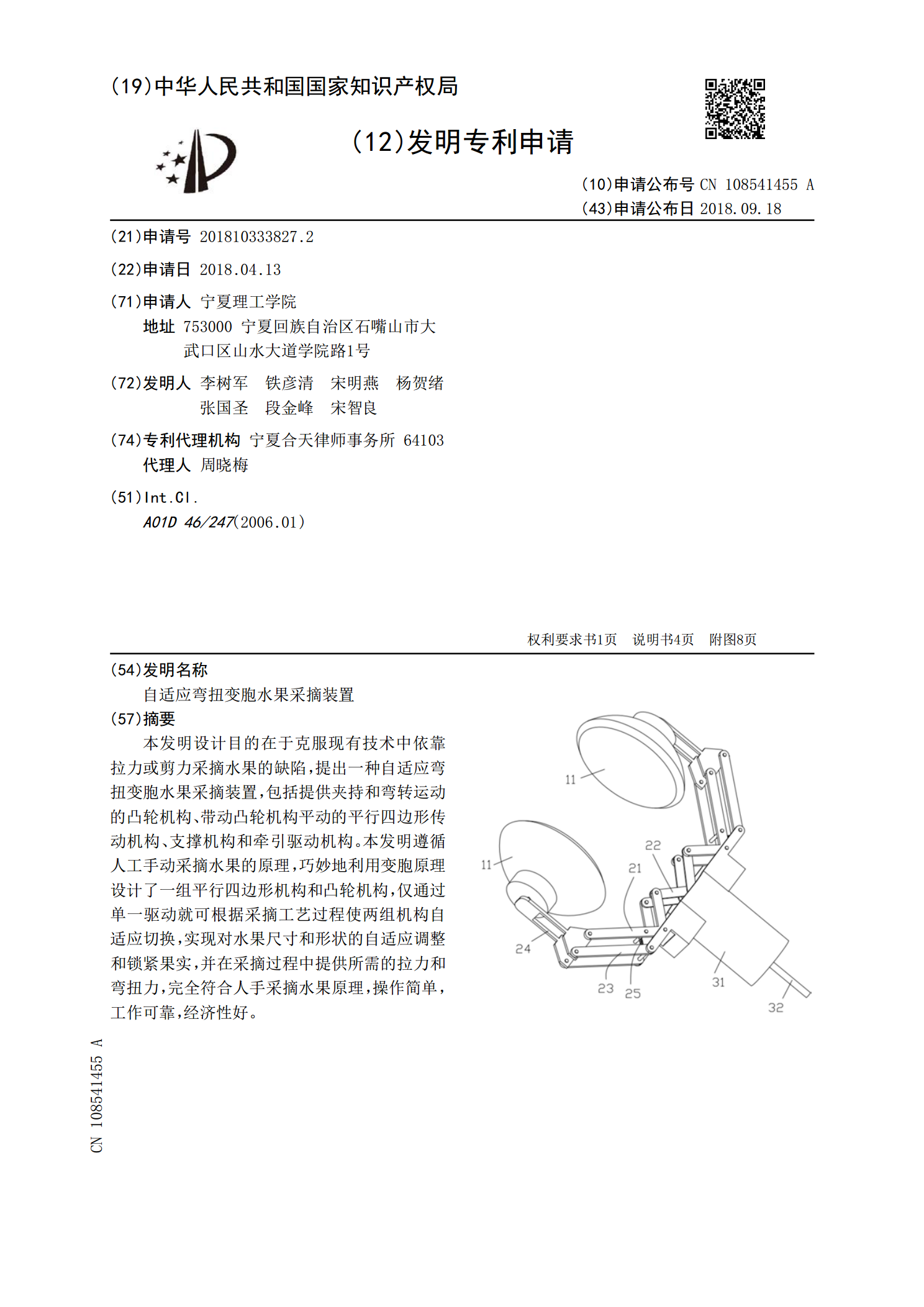
本发明设计目的在于克服现有技术中依靠拉力或剪力采摘水果的缺陷,提出一种自适应弯扭变胞水果采摘装置,包括提供夹持和弯转运动的凸轮机构、带动凸轮机构平动的平行四边形传动机构、支撑机构和牵引驱动机构。本发明遵循人工手动采摘水果的原理,巧妙地利用变胞原理设计了一组平行四边形机构和凸轮机构,仅通过单一驱动就可根据采摘工艺过程使两组机构自适应切换,实现对水果尺寸和形状的自适应调整和锁紧果实,并在采摘过程中提供所需的拉力和弯扭力,完全符合人手采摘水果原理,操作简单,工作可靠,经济性好。

翻转式变胞移动机构.pdf
一种翻转式变胞移动机构,解决了现有检测绝缘子机构的体积偏大,结构较复杂,运行时易对绝缘子表面造成一定的损伤,适应性较差等问题。包括与绝缘子卡接的翻转臂,相互连接成整体环抱绝缘子串的移动单元以及检测元件,其技术要点是:采用结构相同的至少三组移动单元,利用电机驱动的传动机构输出轴端的驱动轮,将内啮合变胞翻转机构组装在支撑架两个联接架之间,作为检测作业的行走装置,充分利用内啮合变胞翻转机构具有的改变工作构态的特点,完成两个构态间的切换,实现整体移动机构的连续向上移动。其结构设计合理,易于安装拆卸,检测作业中运行
行星轮式变胞移动机构.pdf
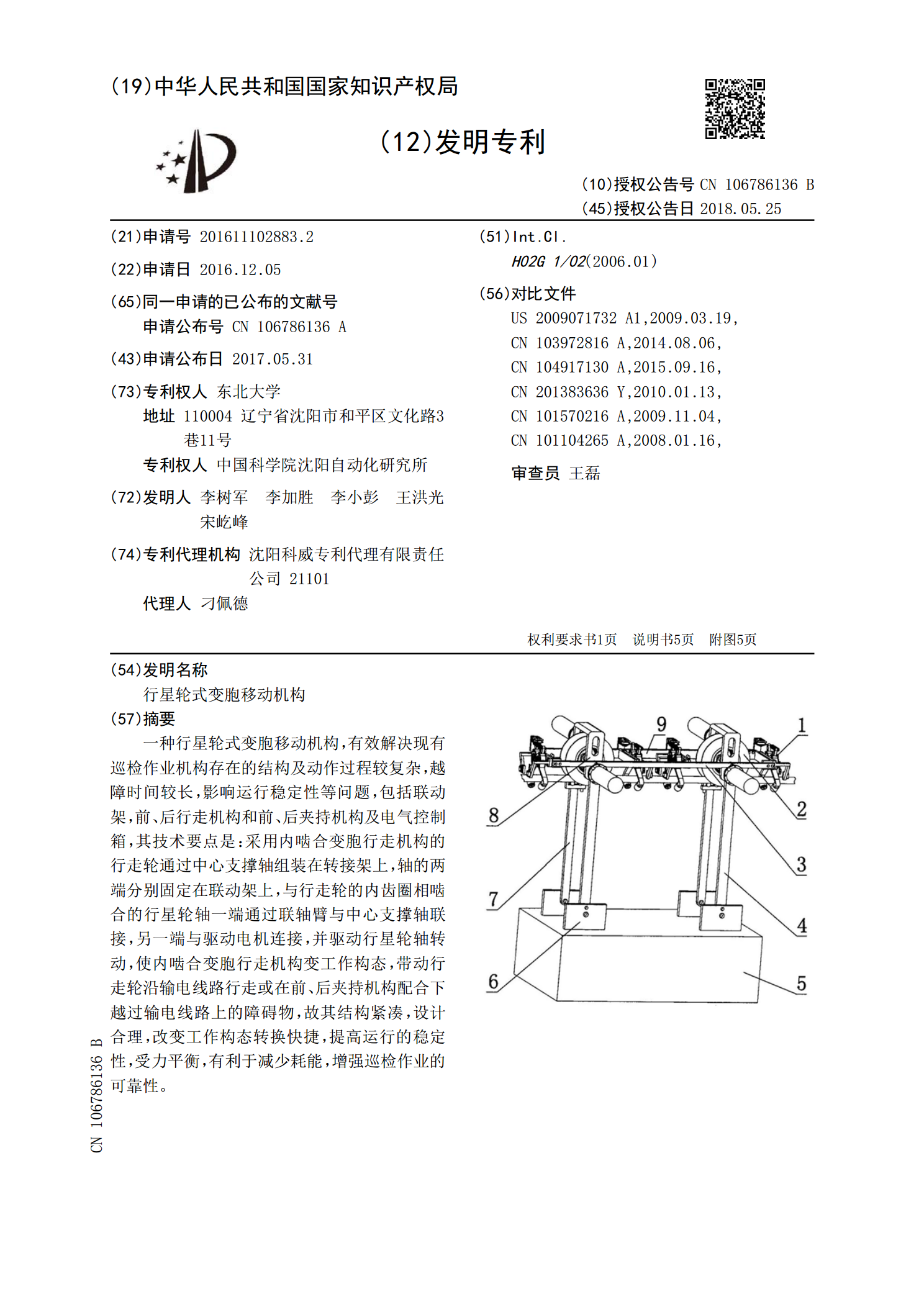
一种行星轮式变胞移动机构,有效解决现有巡检作业机构存在的结构及动作过程较复杂,越障时间较长,影响运行稳定性等问题,包括联动架,前、后行走机构和前、后夹持机构及电气控制箱,其技术要点是:采用内啮合变胞行走机构的行走轮通过中心支撑轴组装在转接架上,轴的两端分别固定在联动架上,与行走轮的内齿圈相啮合的行星轮轴一端通过联轴臂与中心支撑轴联接,另一端与驱动电机连接,并驱动行星轮轴转动,使内啮合变胞行走机构变工作构态,带动行走轮沿输电线路行走或在前、后夹持机构配合下越过输电线路上的障碍物,故其结构紧凑,设计合理,改变