
翻转式变胞移动机构.pdf

永梅****33


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

翻转式变胞移动机构.pdf
一种翻转式变胞移动机构,解决了现有检测绝缘子机构的体积偏大,结构较复杂,运行时易对绝缘子表面造成一定的损伤,适应性较差等问题。包括与绝缘子卡接的翻转臂,相互连接成整体环抱绝缘子串的移动单元以及检测元件,其技术要点是:采用结构相同的至少三组移动单元,利用电机驱动的传动机构输出轴端的驱动轮,将内啮合变胞翻转机构组装在支撑架两个联接架之间,作为检测作业的行走装置,充分利用内啮合变胞翻转机构具有的改变工作构态的特点,完成两个构态间的切换,实现整体移动机构的连续向上移动。其结构设计合理,易于安装拆卸,检测作业中运行
行星轮式变胞移动机构.pdf
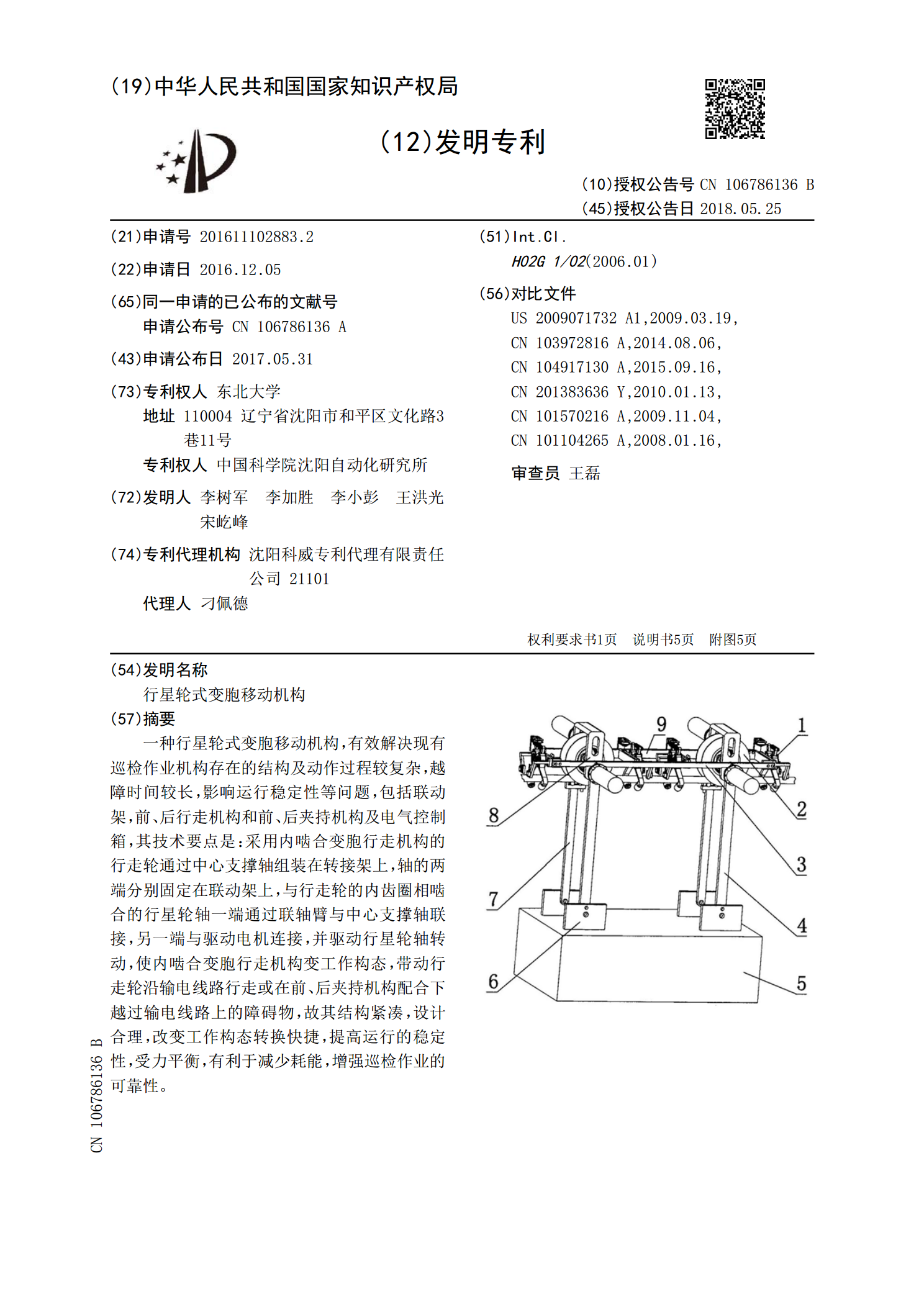
一种行星轮式变胞移动机构,有效解决现有巡检作业机构存在的结构及动作过程较复杂,越障时间较长,影响运行稳定性等问题,包括联动架,前、后行走机构和前、后夹持机构及电气控制箱,其技术要点是:采用内啮合变胞行走机构的行走轮通过中心支撑轴组装在转接架上,轴的两端分别固定在联动架上,与行走轮的内齿圈相啮合的行星轮轴一端通过联轴臂与中心支撑轴联接,另一端与驱动电机连接,并驱动行星轮轴转动,使内啮合变胞行走机构变工作构态,带动行走轮沿输电线路行走或在前、后夹持机构配合下越过输电线路上的障碍物,故其结构紧凑,设计合理,改变
一种变胞机构式可越障机器蟹.pdf
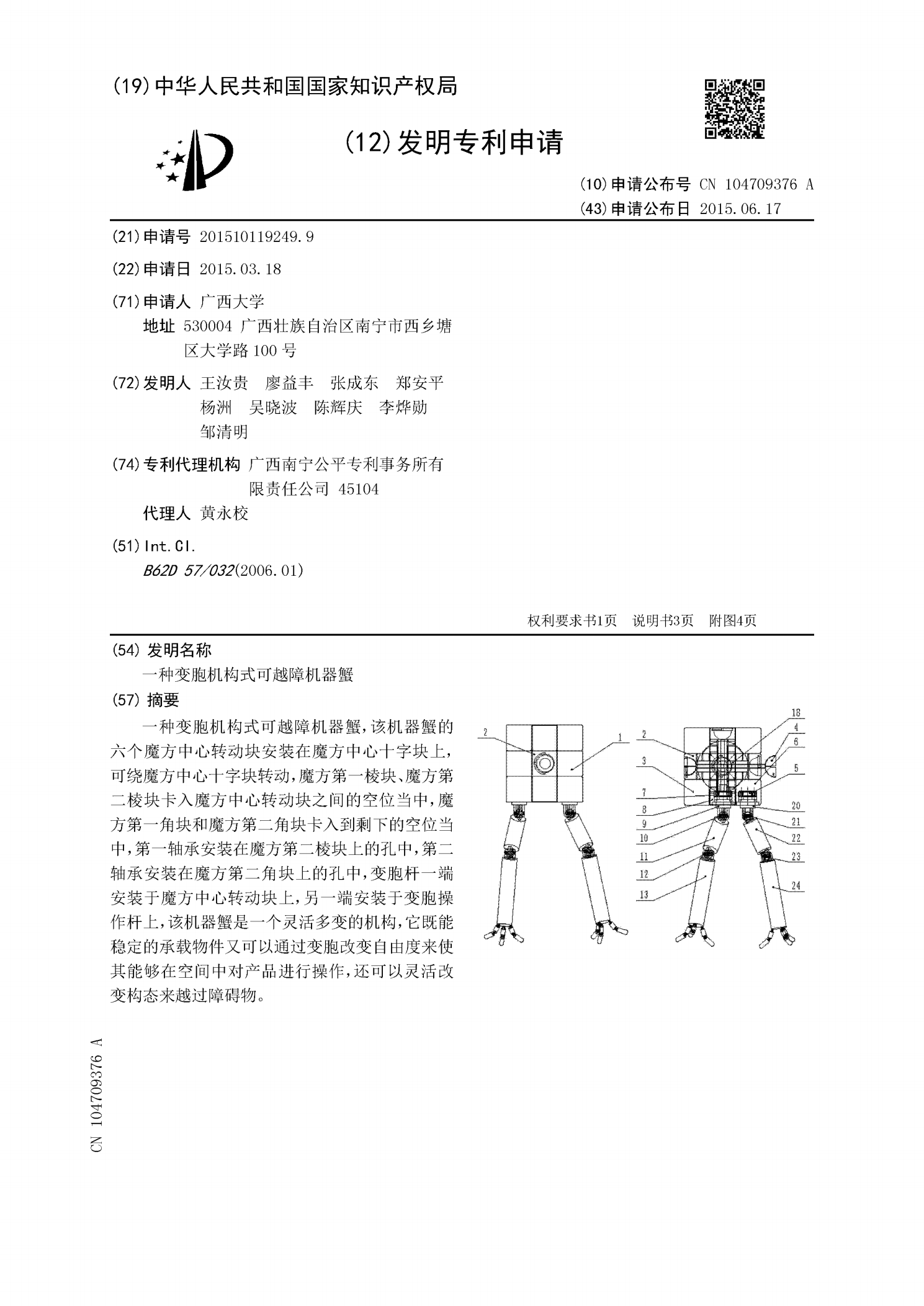
一种变胞机构式可越障机器蟹,该机器蟹的六个魔方中心转动块安装在魔方中心十字块上,可绕魔方中心十字块转动,魔方第一棱块、魔方第二棱块卡入魔方中心转动块之间的空位当中,魔方第一角块和魔方第二角块卡入到剩下的空位当中,第一轴承安装在魔方第二棱块上的孔中,第二轴承安装在魔方第二角块上的孔中,变胞杆一端安装于魔方中心转动块上,另一端安装于变胞操作杆上,该机器蟹是一个灵活多变的机构,它既能稳定的承载物件又可以通过变胞改变自由度来使其能够在空间中对产品进行操作,还可以灵活改变构态来越过障碍物。

一种变胞式纸浆包装作角机构.pdf
一种变胞式纸浆包装作角机构,包括曲柄连杆机构和用于作角的下压板,所述下压板包括顶板和连接在顶板四周的侧板,所述侧板之间留有间隙,其中一对侧板的两侧边分别铰接有侧折板和用于驱动侧折板翻折拨块,且该侧板外侧中部设置有两个齿轮,所述两个齿轮之间穿设有用于带动其转动的竖直齿条,所述两个齿轮各自与一水平齿条传动啮合,所述水平齿条的外端经推杆与拨块传动连接,所述竖直齿条的上端与一上横杆固连,所述上横杆中部与曲柄连杆机构的连杆铰接,所述上横杆中部与下压板之间设置有弹簧。本发明的机构紧凑、造价低,能够实现自动化包装,提高

基于遗传基因理论的变胞机构变胞方程研究.docx
基于遗传基因理论的变胞机构变胞方程研究基于遗传基因理论的变胞机构变胞方程研究摘要:变胞是生物学中一个重要的现象,它在物种进化和个体生长发育过程中起到了至关重要的作用。本文基于遗传基因理论,探讨了变胞机构对变胞方程的影响并进行了相关研究。通过对比不同物种的基因组和遗传机制,我们得出结论:变胞机构和变胞方程之间存在密切的关系,变胞机构的变化直接影响了变胞方程的表达和效果。本研究为进一步深入理解变胞机构和变胞方程提供了新的思路和理论基础。关键词:变胞机构;变胞方程;遗传基因理论1.引言变胞是生物学中一个重要的现