
基于筛选最优目标构型的冗余机械臂路径规划方法及系统.pdf

冬易****娘子

1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于筛选最优目标构型的冗余机械臂路径规划方法及系统.pdf
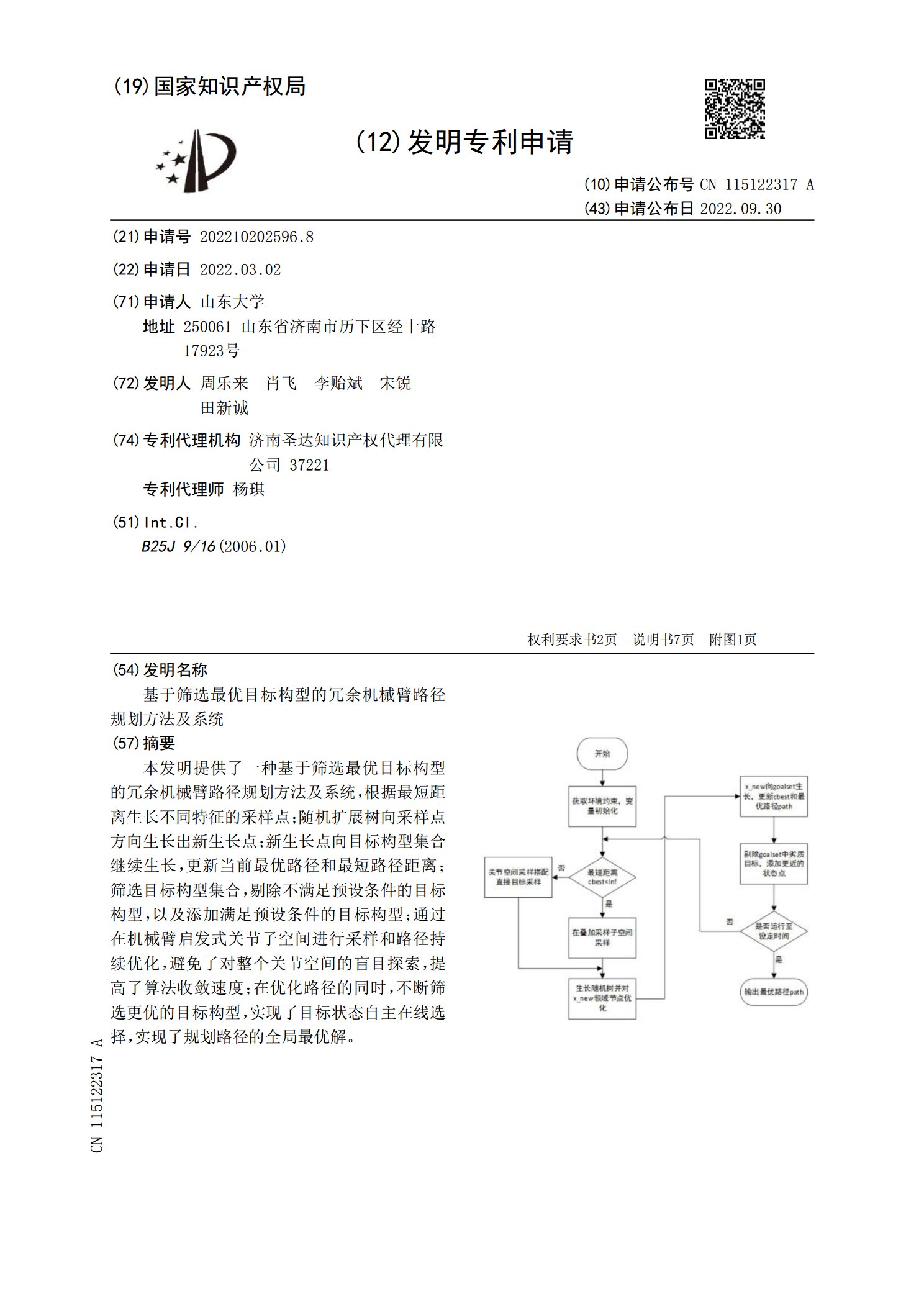
本发明提供了一种基于筛选最优目标构型的冗余机械臂路径规划方法及系统,根据最短距离生长不同特征的采样点;随机扩展树向采样点方向生长出新生长点;新生长点向目标构型集合继续生长,更新当前最优路径和最短路径距离;筛选目标构型集合,剔除不满足预设条件的目标构型,以及添加满足预设条件的目标构型;通过在机械臂启发式关节子空间进行采样和路径持续优化,避免了对整个关节空间的盲目探索,提高了算法收敛速度;在优化路径的同时,不断筛选更优的目标构型,实现了目标状态自主在线选择,实现了规划路径的全局最优解。

空间冗余机械臂路径规划方法研究.docx
空间冗余机械臂路径规划方法研究空间冗余机械臂路径规划方法研究摘要:机器人路径规划一直是机器人领域的核心问题之一。在空间冗余机械臂中,路径规划更加复杂,因为机械臂具有多余的自由度,表现出了更多可能的运动策略。本文以空间冗余机械臂路径规划为研究对象,综述了相关的路径规划方法,并介绍了近年来一些新的算法和技术。通过比较这些方法的优缺点,讨论了未来的研究方向和挑战。关键词:机械臂,路径规划,冗余度,空间冗余,算法,技术1.引言机械臂是一种广泛应用于工业、医疗和服务领域的机器人。路径规划是机械臂控制中的重要问题,它

基于容错空间的冗余机械臂构型及尺度综合.docx
基于容错空间的冗余机械臂构型及尺度综合摘要随着工业自动化的不断发展,机械臂作为重要的工业机器人,越来越广泛地应用于各个领域。然而,由于机械臂复杂的工作环境和工作负载,故障率较高,这给生产带来了巨大的问题。因此,如何提高机械臂的容错性能是一个紧迫的问题。本文提出了一种基于容错空间的冗余机械臂构型及尺度综合方法,该方法能够减少机械臂在故障情况下的损失,并提高机械臂的生产效率和安全性。关键词:机械臂,容错性能,冗余机械臂,构型及尺度综合AbstractWiththecontinuousdevelopmentof

基于容错空间的冗余机械臂构型及尺度综合的开题报告.docx
基于容错空间的冗余机械臂构型及尺度综合的开题报告1.研究背景随着社会的发展和科技的进步,机械臂在生产制造、医疗、环保等各个领域中得到了广泛的应用。机械臂的工作环境更多的趋向于危险、高温、高压等不适合人工操作的情况下,机械臂能够发挥巨大的优势。但是,机械臂作业环境的复杂性和难以进行维护给机械臂的稳定性和可靠性带来了极大的挑战,因此在机械臂上加入冗余器是提高机械臂稳定性和可靠性的一种有效方式,能够有效解决机械臂在作业过程中存在的失效问题。2.研究内容本文研究基于容错空间的冗余机械臂构型及尺度综合,以提高机械臂

冗余机械臂运动避障与路径规划的开题报告.docx
冗余机械臂运动避障与路径规划的开题报告一、研究背景机械臂在工业、医疗、服务和家庭等领域中得到了广泛的应用。在这些应用场景中,机械臂需要完成各种不同的任务,例如装配、喷涂、拾取和送货等。机械臂的运动必须精确而高效,否则会影响任务的完成质量和效率。然而,在机器人运动过程中,通常会面临障碍物的问题。机械臂需要能够避开障碍物,同时保证路径的规划和运动的连续性。因此,如何实现机械臂的避障和路径规划成为了当前机器人领域中的一个重点研究方向。二、研究目的本研究的目的是设计一种冗余机械臂的运动避障与路径规划方法。该方法能