
辐条旋转变形式轮履腿复合行走装置.pdf

霞英****娘子

1/9
2/9
3/9
4/9

5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
辐条旋转变形式轮履腿复合行走装置.pdf
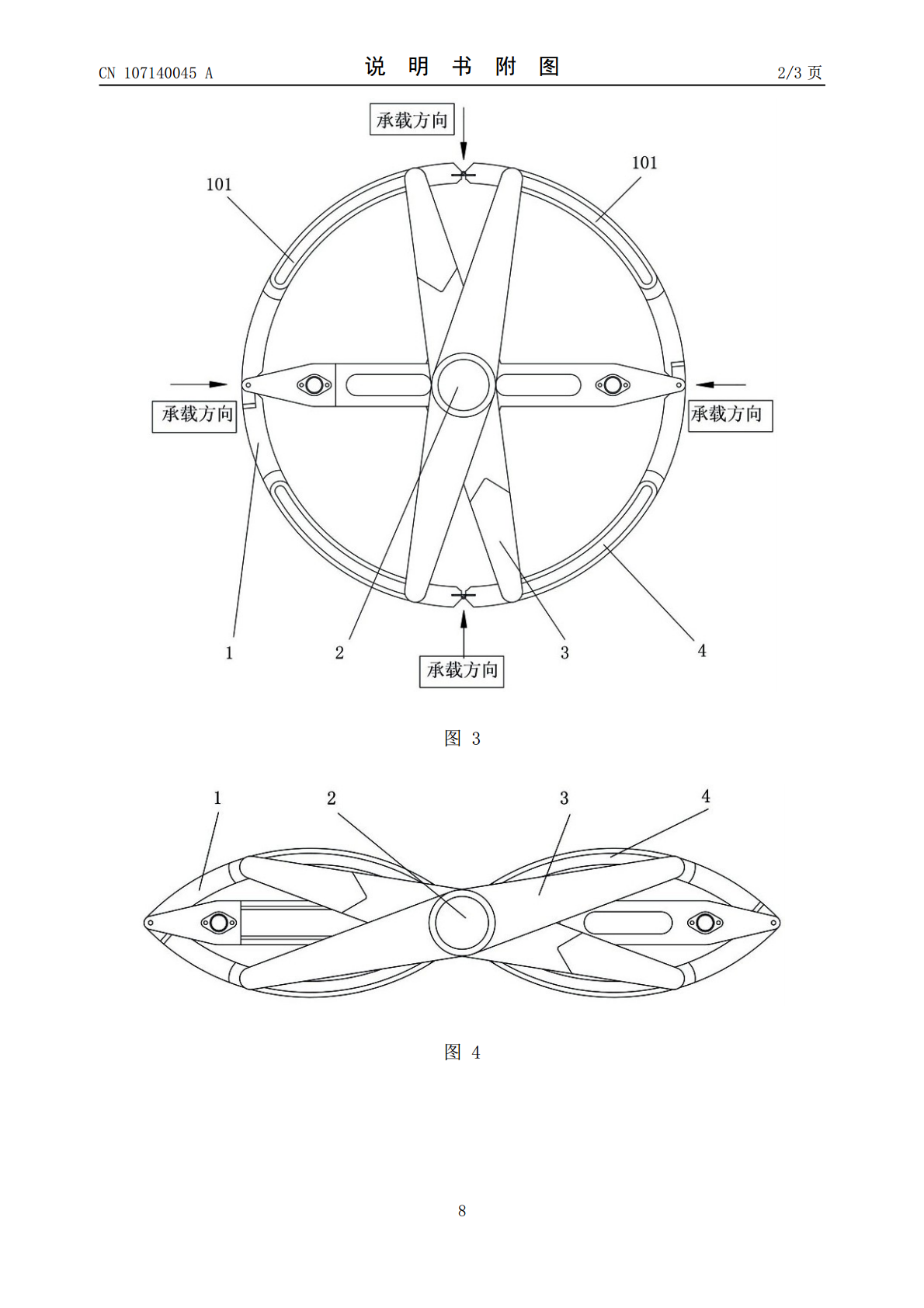
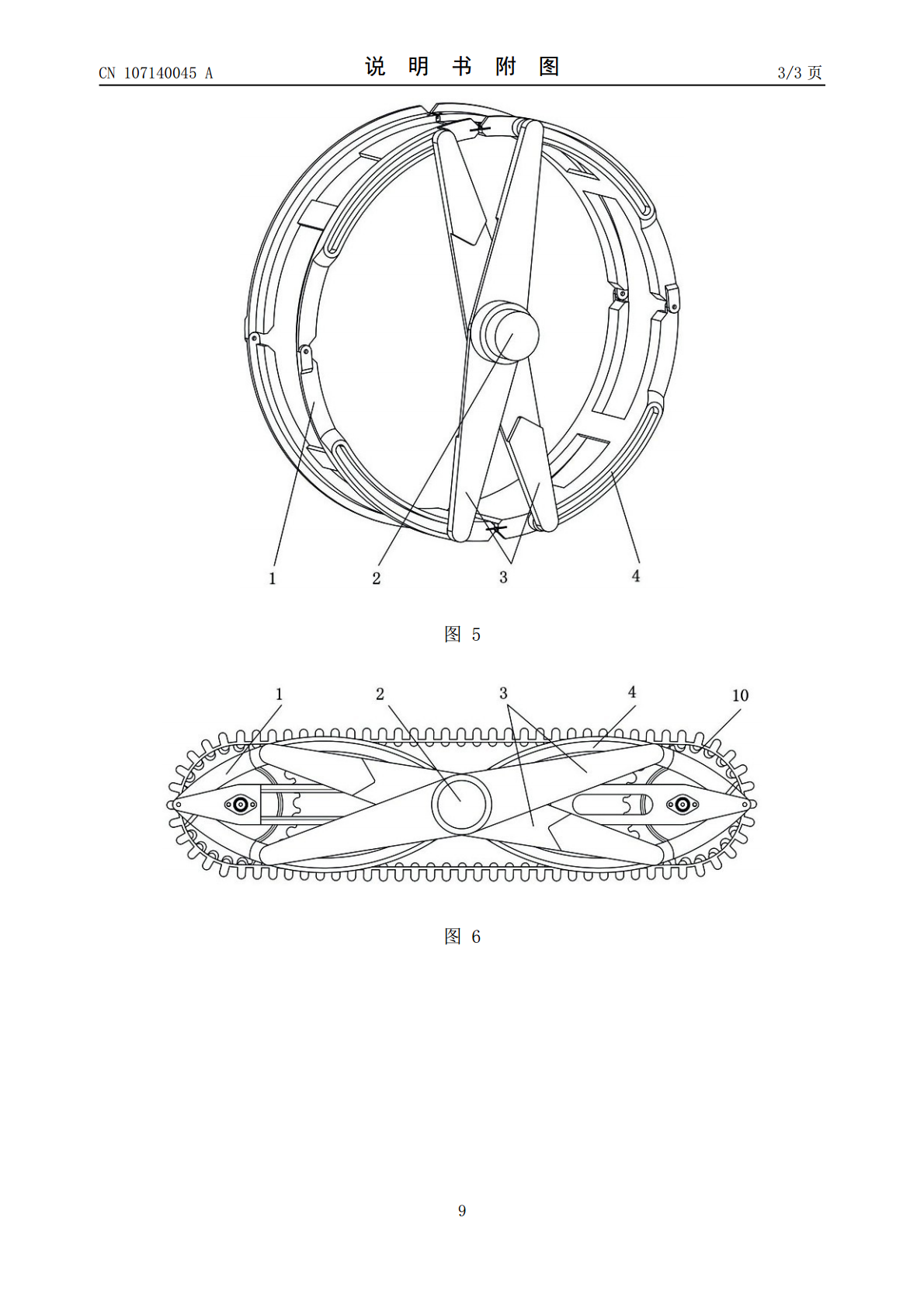
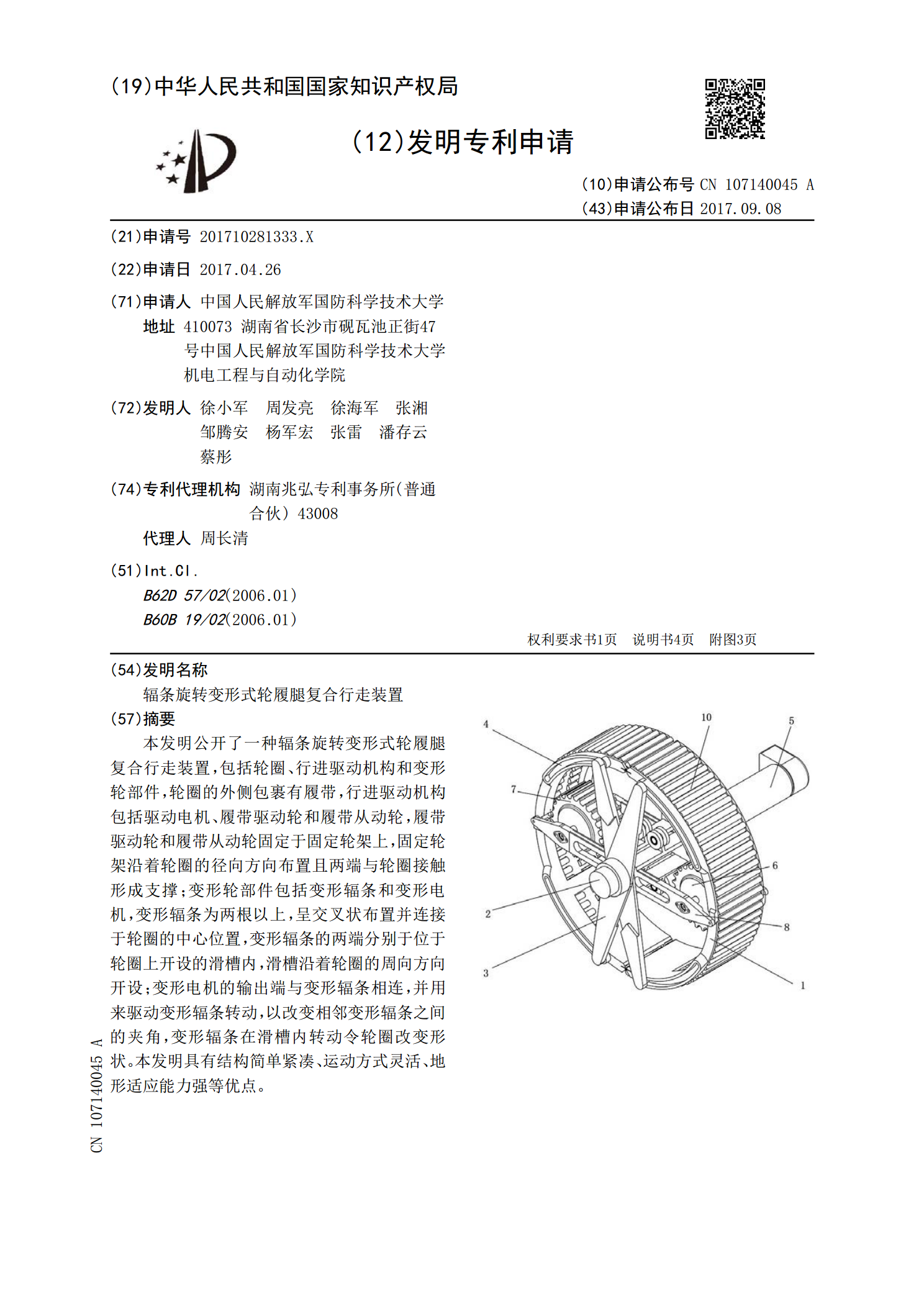
本发明公开了一种辐条旋转变形式轮履腿复合行走装置,包括轮圈、行进驱动机构和变形轮部件,轮圈的外侧包裹有履带,行进驱动机构包括驱动电机、履带驱动轮和履带从动轮,履带驱动轮和履带从动轮固定于固定轮架上,固定轮架沿着轮圈的径向方向布置且两端与轮圈接触形成支撑;变形轮部件包括变形辐条和变形电机,变形辐条为两根以上,呈交叉状布置并连接于轮圈的中心位置,变形辐条的两端分别于位于轮圈上开设的滑槽内,滑槽沿着轮圈的周向方向开设;变形电机的输出端与变形辐条相连,并用来驱动变形辐条转动,以改变相邻变形辐条之间的夹角,变形辐条

同步伸缩变形式轮履腿复合行走装置.pdf
本发明公开了一种同步伸缩变形式轮履腿复合行走装置,包括轮圈、行进驱动机构和变形轮部件,所述轮圈的外侧包裹有履带,所述变形轮部件包括变形电机和三根以上的支撑丝杆,所述变形电机位于轮圈的中部,所述支撑丝杆上通过螺纹配合安装有螺母接头,所述螺母接头与轮圈接触形成联动支撑,所述支撑丝杆均通过传动部件与所述变形电机的输出端相连并在变形电机驱动下转动,在所述支撑丝杆的转动过程中,所述螺母接头会在支撑丝杆上平移令轮圈改变形状。本发明具有结构简单紧凑、运动方式灵活、地形适应能力强等优点。
复合轮-履-曲腿的越障行走系统.pdf
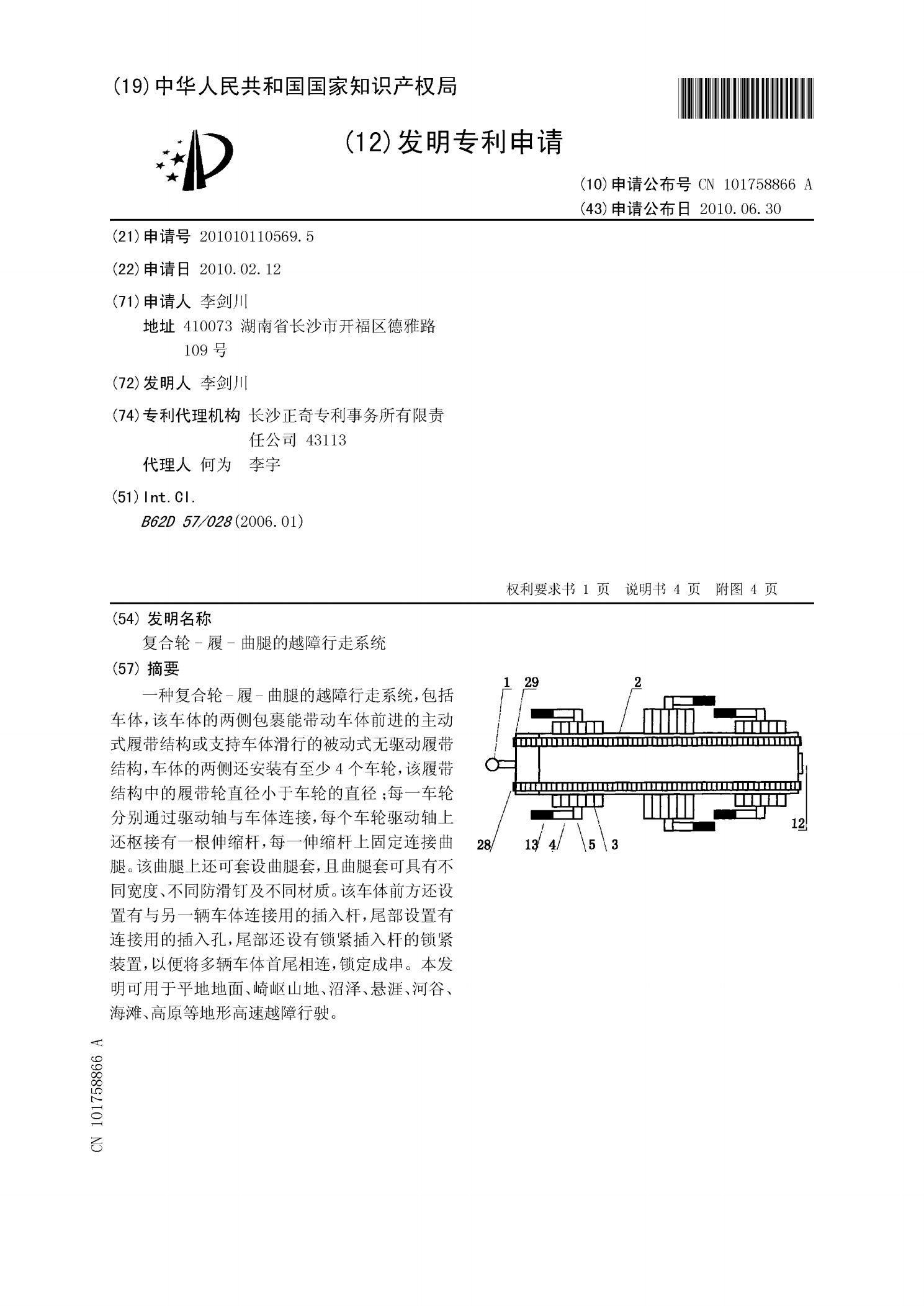
一种复合轮-履-曲腿的越障行走系统,包括车体,该车体的两侧包裹能带动车体前进的主动式履带结构或支持车体滑行的被动式无驱动履带结构,车体的两侧还安装有至少4个车轮,该履带结构中的履带轮直径小于车轮的直径;每一车轮分别通过驱动轴与车体连接,每个车轮驱动轴上还枢接有一根伸缩杆,每一伸缩杆上固定连接曲腿。该曲腿上还可套设曲腿套,且曲腿套可具有不同宽度、不同防滑钉及不同材质。该车体前方还设置有与另一辆车体连接用的插入杆,尾部设置有连接用的插入孔,尾部还设有锁紧插入杆的锁紧装置,以便将多辆车体首尾相连,锁定成串。本发
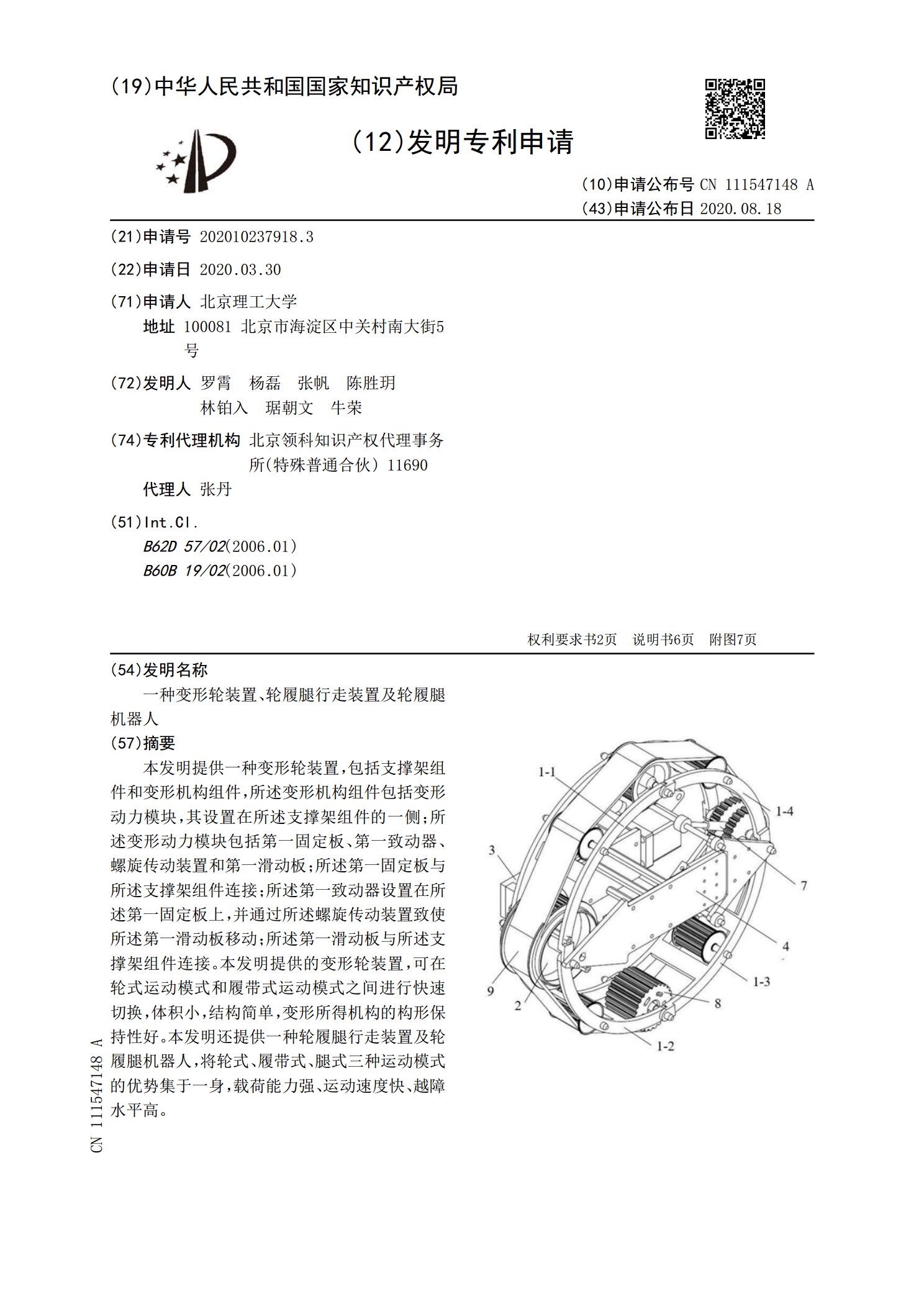
一种变形轮装置、轮履腿行走装置及轮履腿机器人.pdf
本发明提供一种变形轮装置,包括支撑架组件和变形机构组件,所述变形机构组件包括变形动力模块,其设置在所述支撑架组件的一侧;所述变形动力模块包括第一固定板、第一致动器、螺旋传动装置和第一滑动板;所述第一固定板与所述支撑架组件连接;所述第一致动器设置在所述第一固定板上,并通过所述螺旋传动装置致使所述第一滑动板移动;所述第一滑动板与所述支撑架组件连接。本发明提供的变形轮装置,可在轮式运动模式和履带式运动模式之间进行快速切换,体积小,结构简单,变形所得机构的构形保持性好。本发明还提供一种轮履腿行走装置及轮履腿机器人
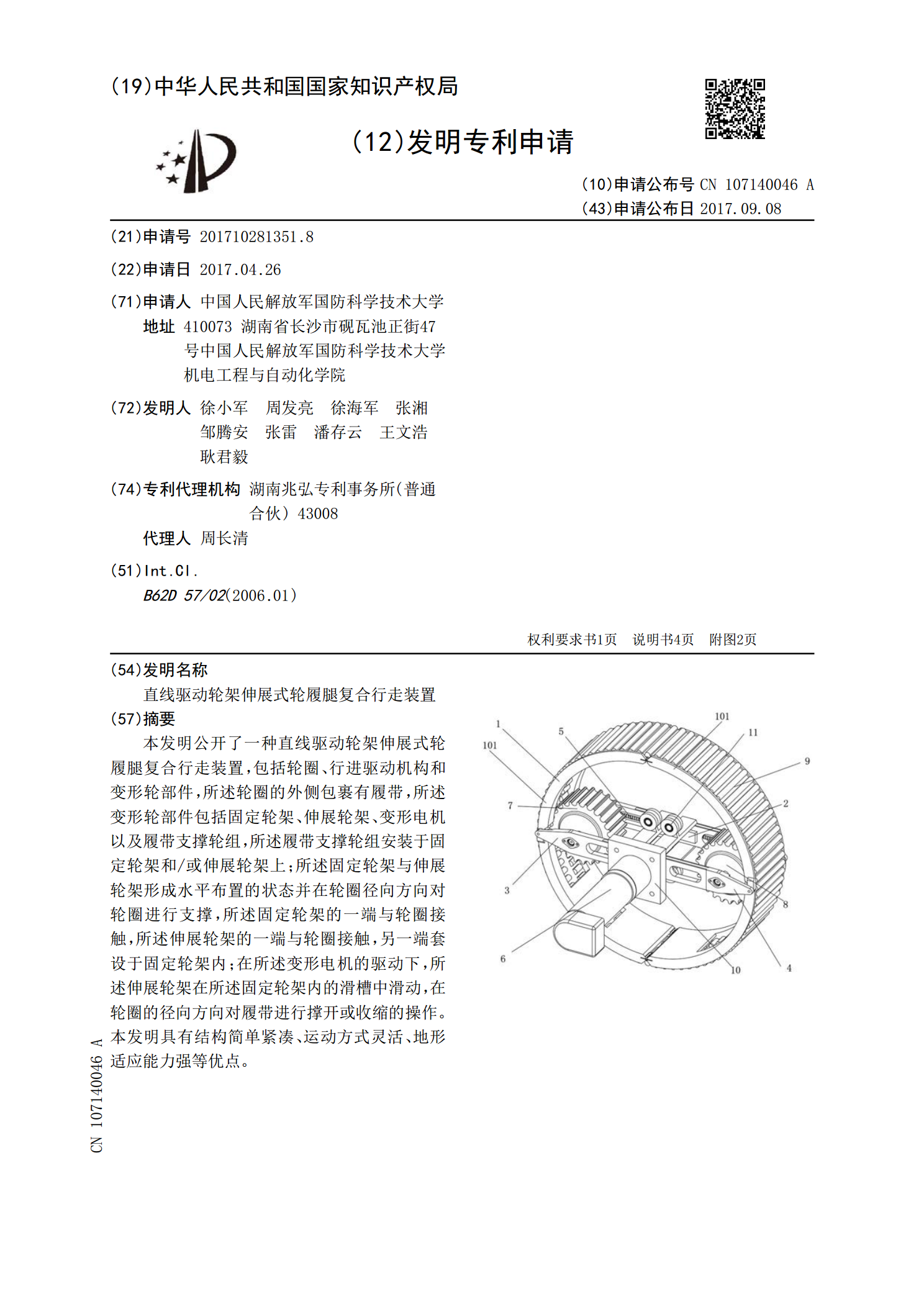
直线驱动轮架伸展式轮履腿复合行走装置.pdf
本发明公开了一种直线驱动轮架伸展式轮履腿复合行走装置,包括轮圈、行进驱动机构和变形轮部件,所述轮圈的外侧包裹有履带,所述变形轮部件包括固定轮架、伸展轮架、变形电机以及履带支撑轮组,所述履带支撑轮组安装于固定轮架和/或伸展轮架上;所述固定轮架与伸展轮架形成水平布置的状态并在轮圈径向方向对轮圈进行支撑,所述固定轮架的一端与轮圈接触,所述伸展轮架的一端与轮圈接触,另一端套设于固定轮架内;在所述变形电机的驱动下,所述伸展轮架在所述固定轮架内的滑槽中滑动,在轮圈的径向方向对履带进行撑开或收缩的操作。本发明具有结构简