
自动控制原理简明教程完整ppt课件.ppt

天马****23

1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共472页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动控制原理简明教程完整ppt课件.ppt
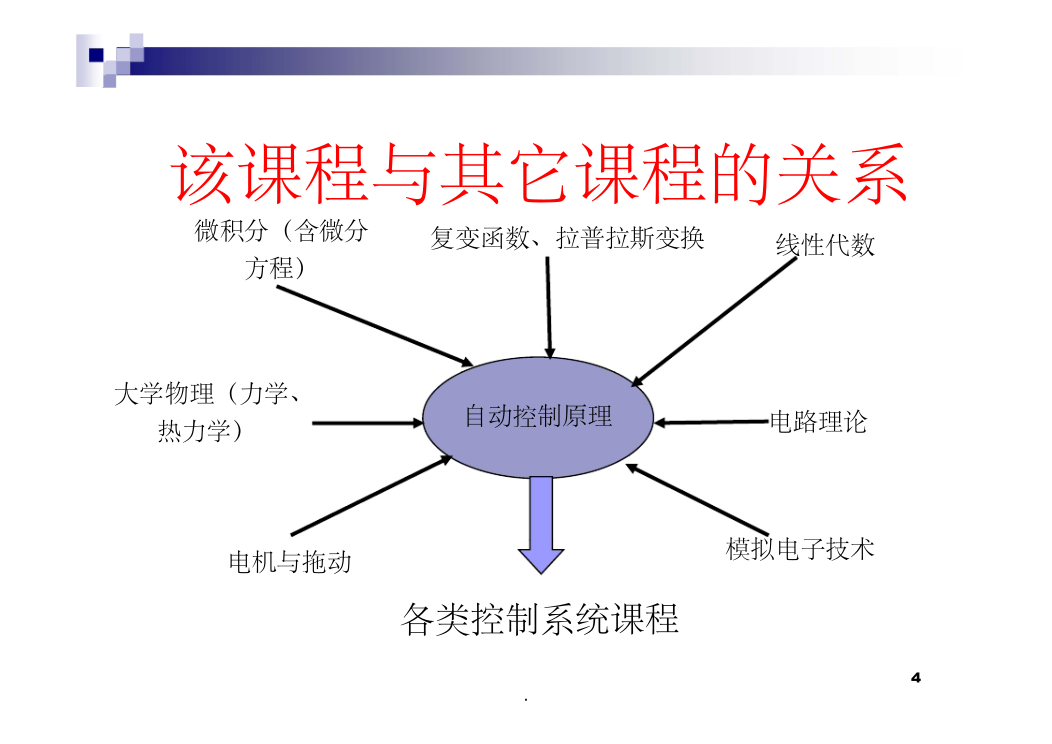
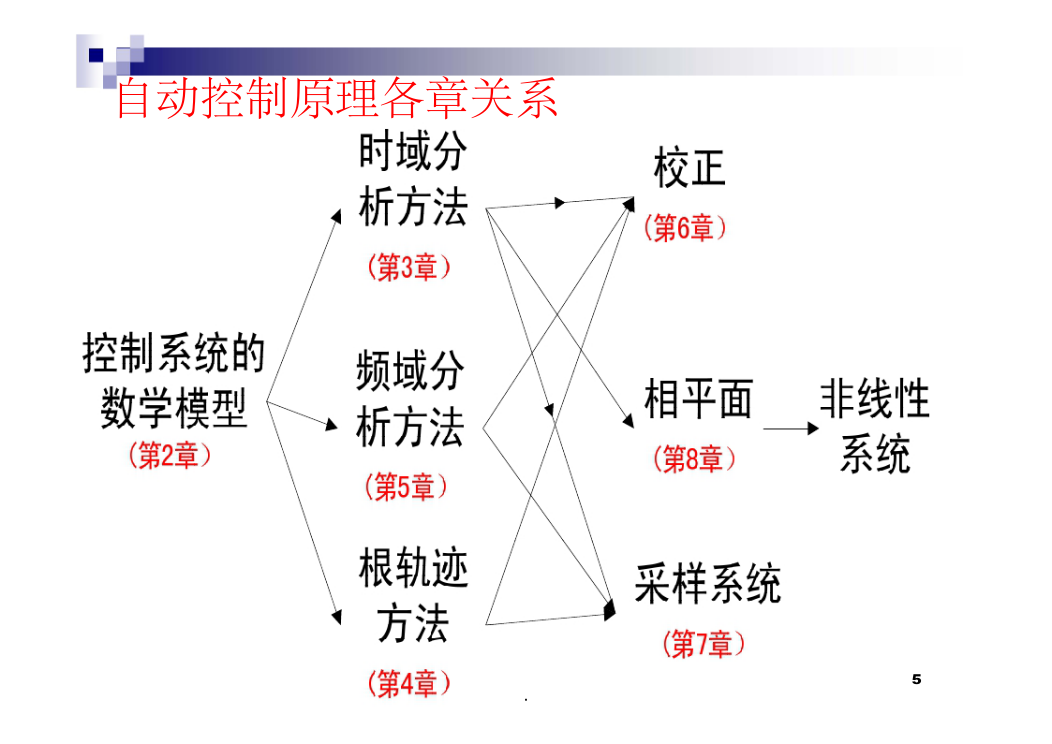
自动控制原理本学期课程安排成绩构成该课程与其它课程的关系自动控制原理各章关系第一章控制系统导论7自动控制技术的应用9“勇气”号在火星工作的英姿1.1.2自动控制理论发展史•十八世纪以后,蒸汽机的使用提出了调速稳定等问题自动控制成为一门科学是从1945发展起来的2.现代控制理论时期(20世纪50年代末-60年代初)3.大系统和智能控制时期(20世纪70年代)1.1.3自动控制的基本原理(反馈控制原理)人工控制的例子示例——水池水位控制人工控制人脑:记住水位的期望值;人眼:观察水池的实际水位;测量(测量反馈机

自动控制原理简明教程.docx
自动控制原理简明教程一、内容概述引言:简要介绍自动控制原理的基本概念、发展历程以及在现代社会中的广泛应用,为读者提供一个宏观的视角来了解自动控制的重要性。自动控制系统的基本原理:详细介绍自动控制系统的基本原理,包括系统的组成、分类、工作原理以及性能指标等,为后续章节的学习打下基础。控制系统的数学模型:阐述控制系统的数学建模方法,包括微分方程、传递函数、状态空间表达式等,帮助读者理解系统的动态特性。控制系统的分析方法:介绍控制系统的分析方法,包括时域分析、频域分析以及根轨迹分析等,帮助读者掌握分析系统性能的

简明法语教程上ppt课件.ppt
Leçon19Lexiquedéclarerv.t.attacherv.t.espérerv.t.descendretenirv.t.montrerv.t.mettrev.t.passeroui,non,si的用法(用于回答一般疑问句)oui,non,si的用法(用于回答一般疑问句)连词que引导的从句连词que引导的从句Questions限定短语ne...que限定短语ne...que否定短语否定短语否定短语否定短语否定短语Rendreserviceàquelqu'unRendreserviceàque
概率统计简明教程完整讲义ppt课件.ppt
普通高等教育“十五”国家级规划教材«概率统计简明教程»━多媒体教学参考资料参考书目(一)从“什么是统计”说起(二)重在“观念”和“思考”(三)“不确定性”和“随机性”(四)统计的特点(一)从“统计是什么”说起1、几个案例小儿麻痹症82、统计学是收集和分析数据的科学和艺术103、统计是受过教育的人应有的素养。血液检查中的经济学可将申请者分成20人一组,如每组进行20次检查,则平均一组有一例阳性。今把20人分成2组(10人一组),采得每个组的10个人的混合血液,分别再对二次混合血液各做一次检验,则有一组呈阳性

清华大学--自动控制原理简明教程3.ppt
第三章线性系统的时域分析法自动控制原理课程的任务与体系结构(1)直接在时间域中对系统进行分析校正,直观,准确;(2)可以提供系统时间响应的全部信息;(3)基于求解系统输出的解析解,比较烦琐。§3.1系统时间响应性能指标动态过程:系统在典型信号作用下,系统输出量从初始状态到最终状态的响应过程,又称过渡过程或瞬态过程。稳态过程:系统在典型输入信号作用下,当时间t趋于无穷时,系统输出量的表现方式,又称稳态响应。§3.1.3动态性能与稳态性能时间tr(1)延迟时间td:响应曲线第一次达到其终值一半所需时间。(2)