
物料高度及平整度测量系统、测量方法及其自校准方法.pdf

书生****35


1/9
2/9
3/9

4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

物料高度及平整度测量系统、测量方法及其自校准方法.pdf
本发明提供了一种物料高度及平整度测量系统、测量方法及其自校准方法,包括激光轮廓传感器、旋转机构、电机及控制器,其中,所述激光轮廓传感器设置于所述旋转机构的下方,并位于被测物料的正上方,所述旋转机构的转轴线、激光轮廓传感器的测量线以及放置物料的料桶中心线三线重合,所述电机设置于所述旋转机构的上方,所述控制器分别与所述电机以及所述激光轮廓传感器相连,所述电机在所述控制器的控制下带动所述旋转机构转动,所述控制器读取所述激光轮廓传感器的测量结果,从而得到物料的高度及平整度信息,本发明基于线激光的自旋扫描式测量,实
高度差测量装置及其测量方法.pdf
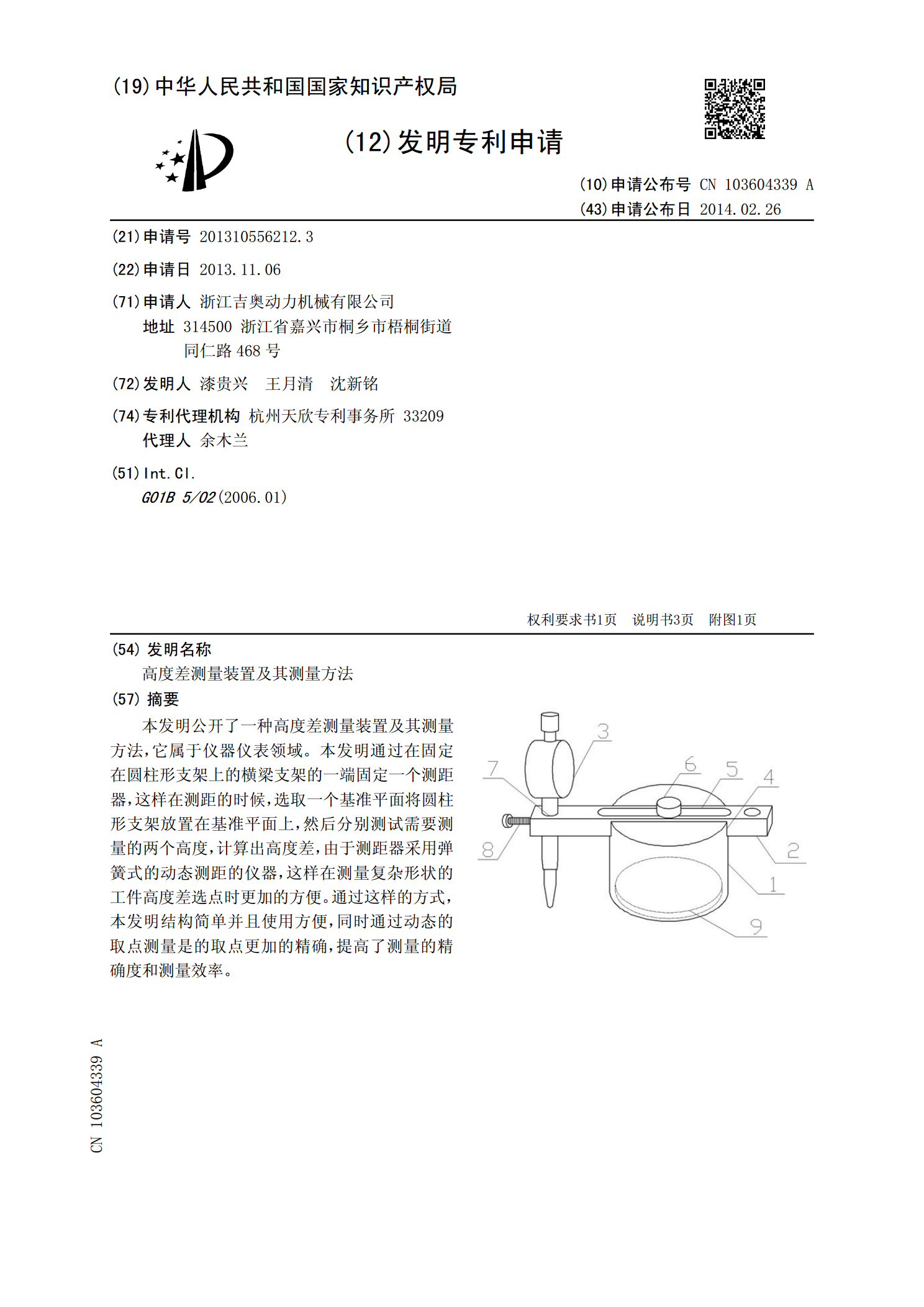
本发明公开了一种高度差测量装置及其测量方法,它属于仪器仪表领域。本发明通过在固定在圆柱形支架上的横梁支架的一端固定一个测距器,这样在测距的时候,选取一个基准平面将圆柱形支架放置在基准平面上,然后分别测试需要测量的两个高度,计算出高度差,由于测距器采用弹簧式的动态测距的仪器,这样在测量复杂形状的工件高度差选点时更加的方便。通过这样的方式,本发明结构简单并且使用方便,同时通过动态的取点测量是的取点更加的精确,提高了测量的精确度和测量效率。

电站水汽系统pH测量自校准方法和测量校准系统.pdf
本发明属于分析检测技术领域,涉及一种电站水汽系统pH测量自校准方法及测量校准系统,包括以下步骤:1)分别检测水样的氢电导率值、电导率值σ以及pH测量值,并传递给控制装置;2)氢电导率值大于0.3μS/cm,控制装置提取pH值信号直接输出,并发出人工校准的提示;氢电导率值小于0.3μS/cm,控制装置提取电导率值信号,并根据pH=8.57+lgσ计算得到pH计算值,并用pH计算值对pH测量值进行校准,并发出启动pH值自动校准提示。本发明能实现pH测量结果的自动校准,保证测量结果准确性,定期校准周期长,日常维

短距急拉速度测量方法及其校准装置研究.docx
短距急拉速度测量方法及其校准装置研究摘要:本文研究的是短距离急拉速度的测量方法以及校准装置。通过实验发现,在短时间内,我们需要测量物体的急拉速度,而目前市面上的测量设备不太能够满足这种需求。本文提出了一种新的测量方法,并设计了一种校准装置,可以准确地测量短距离急拉速度。关键词:短距急拉速度、测量方法、校准装置。引言:短距离急拉速度测量是一项非常重要的工作,但是现有的测量方法无法完全满足需求。目前市场上的测量设备往往需要较长的时间才能获取数据,而很难在短时间内测量物体的急拉速度。因此,研究一种新的测量方法变

农业土地平整度测量仪及其测量方法.pdf
本发明涉及测量技术领域,特别涉及一种农业土地平整度的测量仪及其测量方法。所述农业土地平整度测量仪包括支架部分、单片机(1)、超声波收发器(3)、温度传感器和数码显示管;其中,所述支架部分中,导轨支撑脚(11)与导轨支撑横梁(6)连接,二者的相接处由固紧片(10)包裹并用把手(5)固定;导轨支撑横梁(6)通过孔与导轨(8)配合;滑块(9)滑动布置在导轨(8)上;单片机(1)安装在单片机主板(7)上,单片机主板(7)布置在滑块(9)上方;单片机主板(7)上设有温度传感器和数码显示管;超声波收发器(3)布置在滑