
一种用于上肢康复外骨骼的重力平衡机构.pdf

努力****冰心


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于上肢康复外骨骼的重力平衡机构.pdf
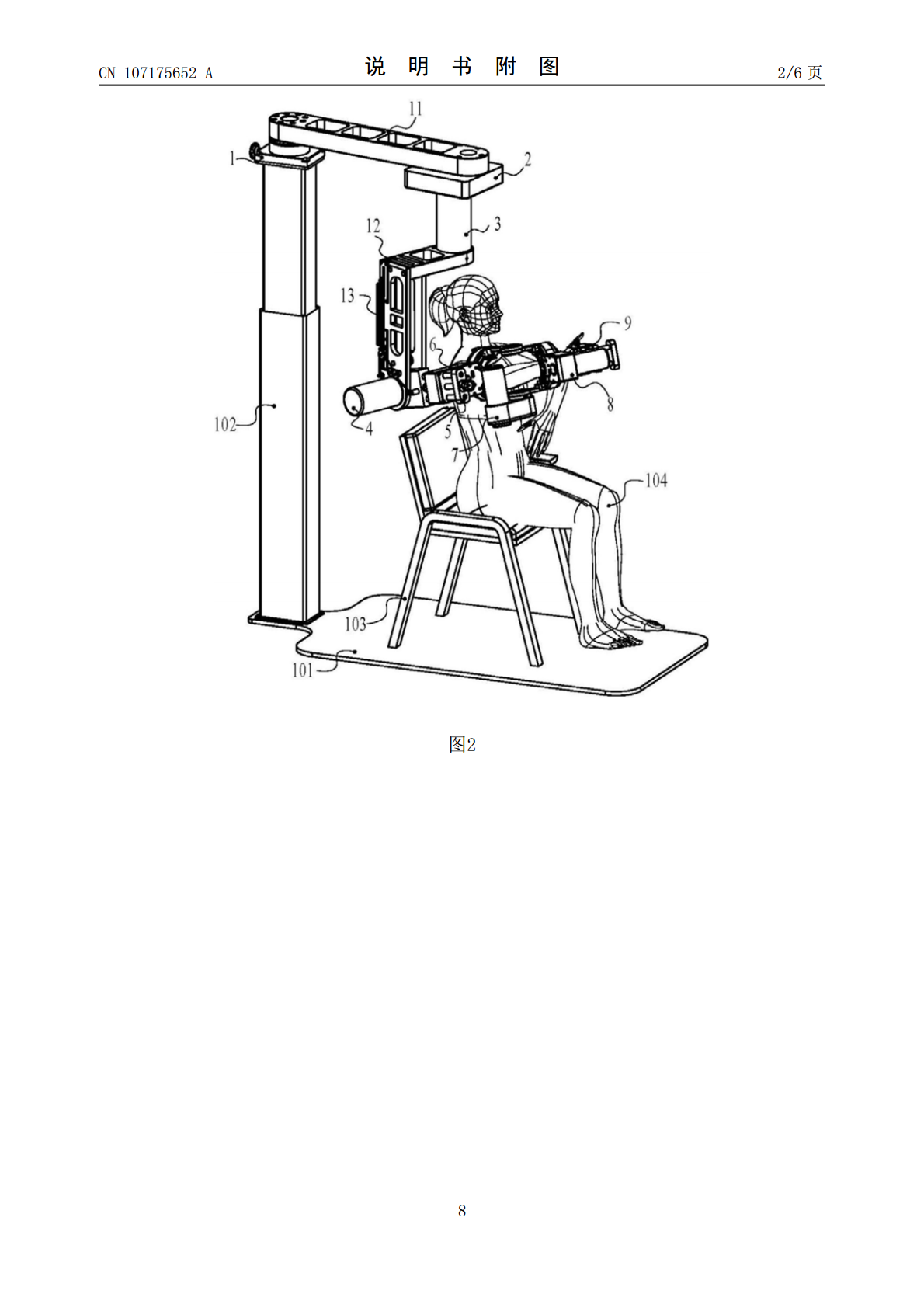
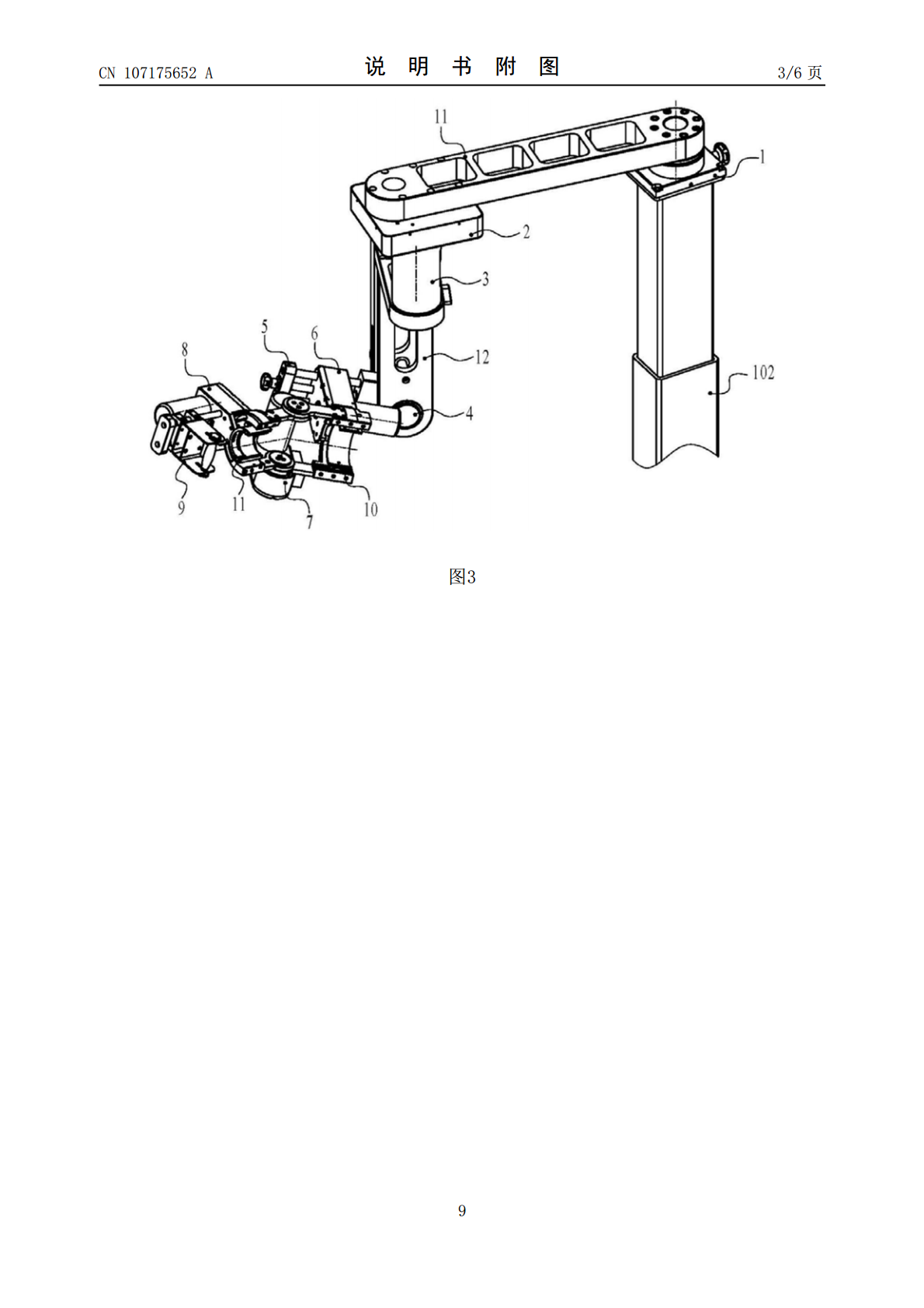
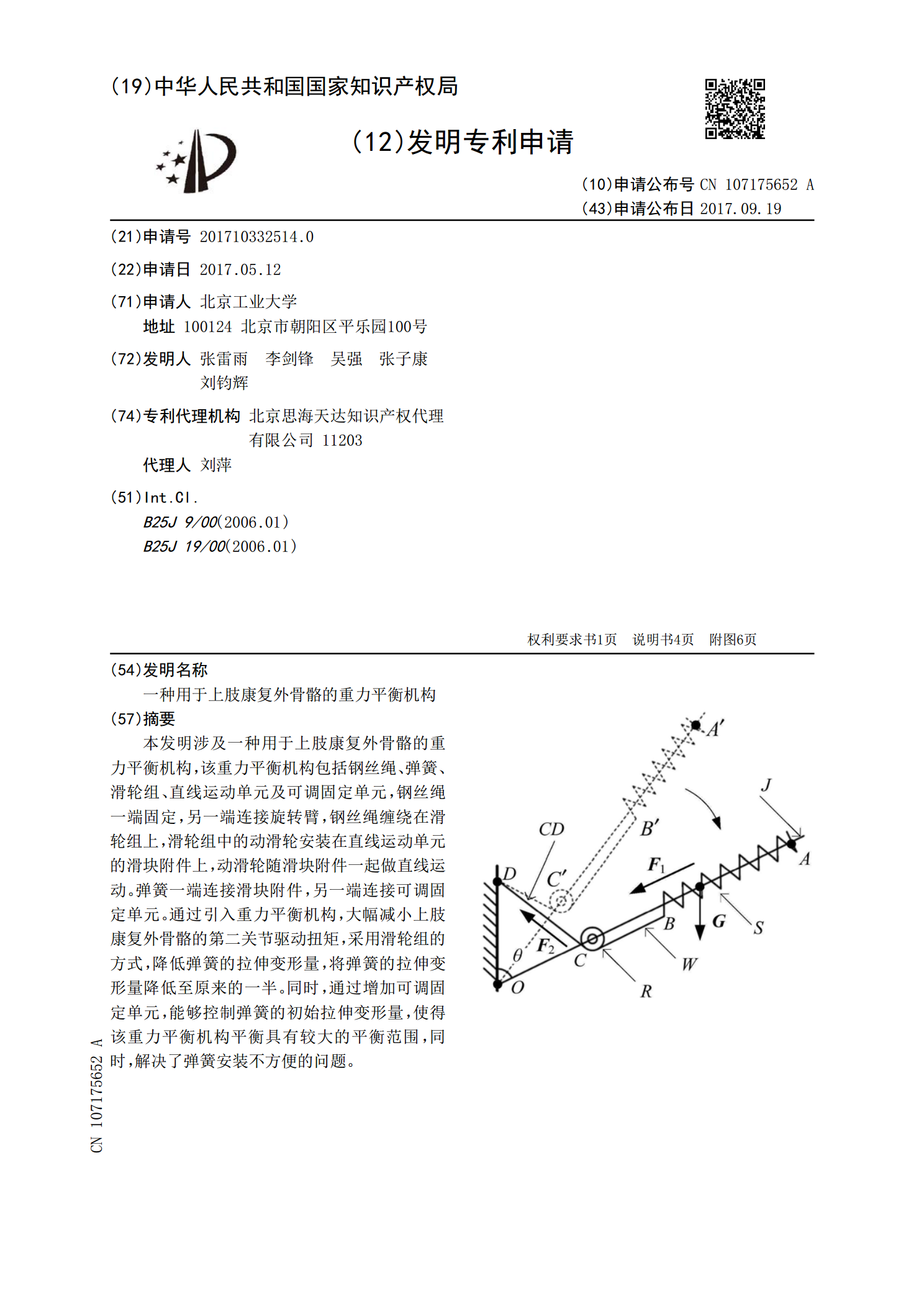
本发明涉及一种用于上肢康复外骨骼的重力平衡机构,该重力平衡机构包括钢丝绳、弹簧、滑轮组、直线运动单元及可调固定单元,钢丝绳一端固定,另一端连接旋转臂,钢丝绳缠绕在滑轮组上,滑轮组中的动滑轮安装在直线运动单元的滑块附件上,动滑轮随滑块附件一起做直线运动。弹簧一端连接滑块附件,另一端连接可调固定单元。通过引入重力平衡机构,大幅减小上肢康复外骨骼的第二关节驱动扭矩,采用滑轮组的方式,降低弹簧的拉伸变形量,将弹簧的拉伸变形量降低至原来的一半。同时,通过增加可调固定单元,能够控制弹簧的初始拉伸变形量,使得该重力平衡

一种基于空间重力平衡的上肢康复外骨骼.pdf
本发明涉及上肢康复技术领域,且公开了一种基于空间重力平衡的上肢康复外骨骼,包括柔性囊,所述柔性囊的内部活动连接有棘轮,棘轮的表面活动连接有棘爪,棘爪远离棘轮的一端活动连接有卡盘,卡盘的表面套接有涡卷弹簧,所述棘轮的表面活动连接有弹力带,弹力带的两端均活动连接有转轴,转轴的底部固定连接有伸缩杆,通过当患者想要弯曲手臂时,手肘弯曲会拉伸柔性囊,故螺杆经啮合轴赋予一定的转速后带动转轴逆时针旋转,故其表面的弹力带被释放,弹力带受到的拉力变小故其弹力收缩,并拉动柔性囊两侧的手肘相互靠近,故从而达到了克服重力势能并使

上肢康复外骨骼重力平衡技术研究.docx
上肢康复外骨骼重力平衡技术研究上肢康复外骨骼重力平衡技术研究摘要:外骨骼技术是近年来快速发展的热点领域,其中上肢康复外骨骼对于帮助患有上肢功能障碍的个体进行康复非常重要。然而,重力平衡是使用外骨骼进行上肢康复时的一个关键问题。本文对上肢康复外骨骼重力平衡技术进行了综述,并讨论了不同的研究方法和技术。通过分析现有研究成果,可以得出结论:通过智能控制和传感技术结合,外骨骼可以实现有效的重力平衡,并提高患者的康复效果。然而,尚需要进一步研究来完善外骨骼重力平衡技术,以满足不同患者的康复需求。关键词:外骨骼、上肢

套索驱动重力平衡上肢康复外骨骼研究的开题报告.docx
套索驱动重力平衡上肢康复外骨骼研究的开题报告一、研究背景:随着科技的不断发展,机器人技术和康复工程的发展也越来越成熟。近年来,随着全球人口老龄化程度的逐步加深,神经系统疾病和脑部创伤的患病率呈上升趋势。然而,传统的康复治疗方法存在一些缺陷,例如过于依赖康复医师,且康复效果不稳定等问题,而此时机器人康复也逐渐成为重要的研究和领域。机器人康复主要是通过外骨骼的设计来为行动不便或在康复过程中的人们提供帮助。外骨骼康复指在机器人的帮助下,保证患者的肢体能够正常运动,促进身体和神经的逐渐恢复。而外骨骼康复机器人则可

被动上肢康复外骨骼的运动分析与重力平衡的开题报告.docx
被动上肢康复外骨骼的运动分析与重力平衡的开题报告一、研究背景近年来,随着机器人技术的进步,外骨骼技术被广泛应用在康复医疗领域,成为一种重要的康复辅助工具。被动上肢康复外骨骼是一种可穿戴的机器人装置,能够帮助患者进行上肢康复训练,并提高训练效果。要想让康复外骨骼发挥更好的作用,必须对其运动特性和重力平衡进行深入研究和分析,从而实现更好的康复效果。本研究旨在对被动上肢康复外骨骼的运动特性和重力平衡进行分析,并为其应用提供有力的理论基础。二、研究目的本研究的主要目的是通过对被动上肢康复外骨骼的运动特性和重力平衡