
一种自平衡电动爬楼轮椅.pdf

山梅****ai

1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自平衡电动爬楼轮椅.pdf
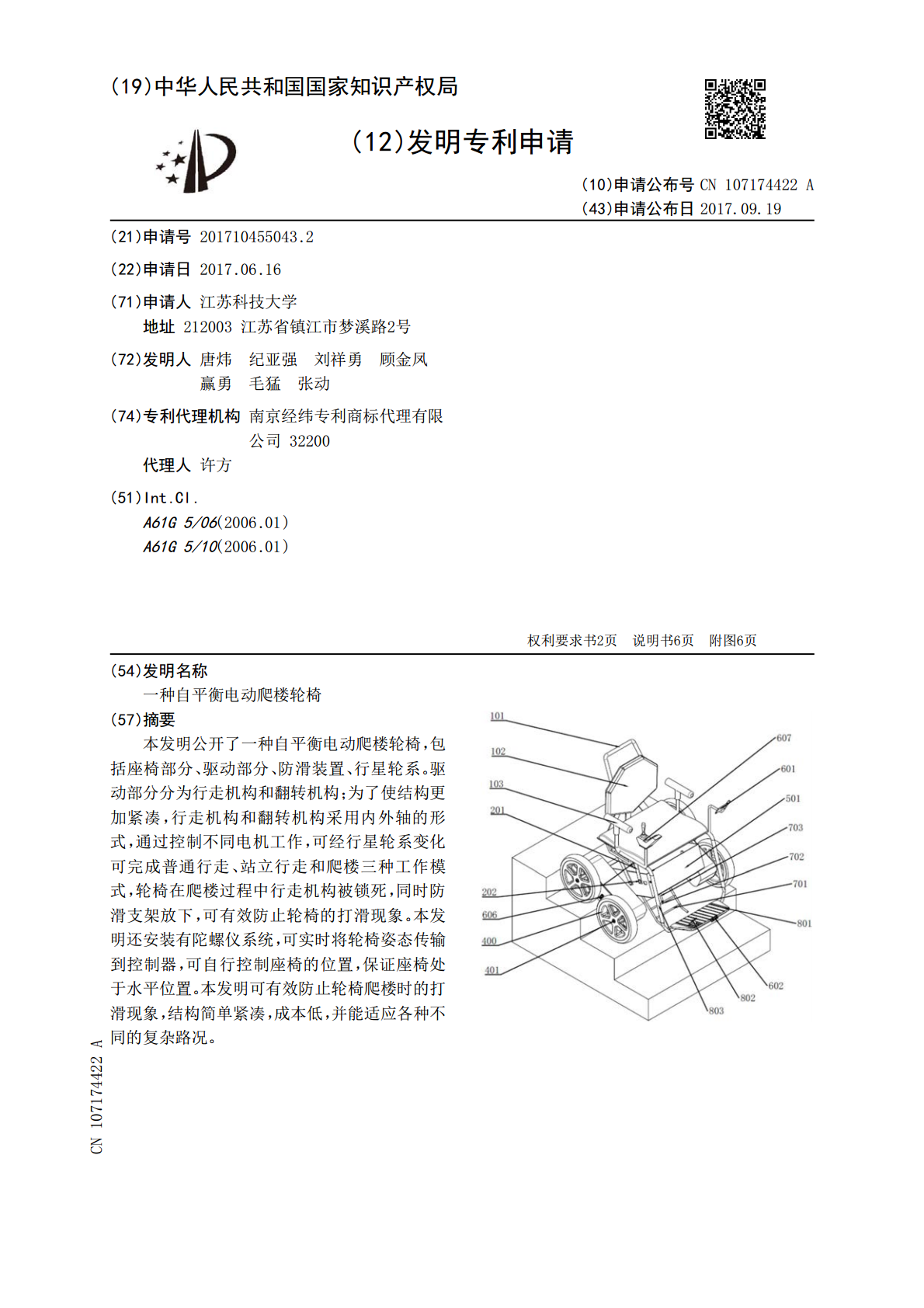
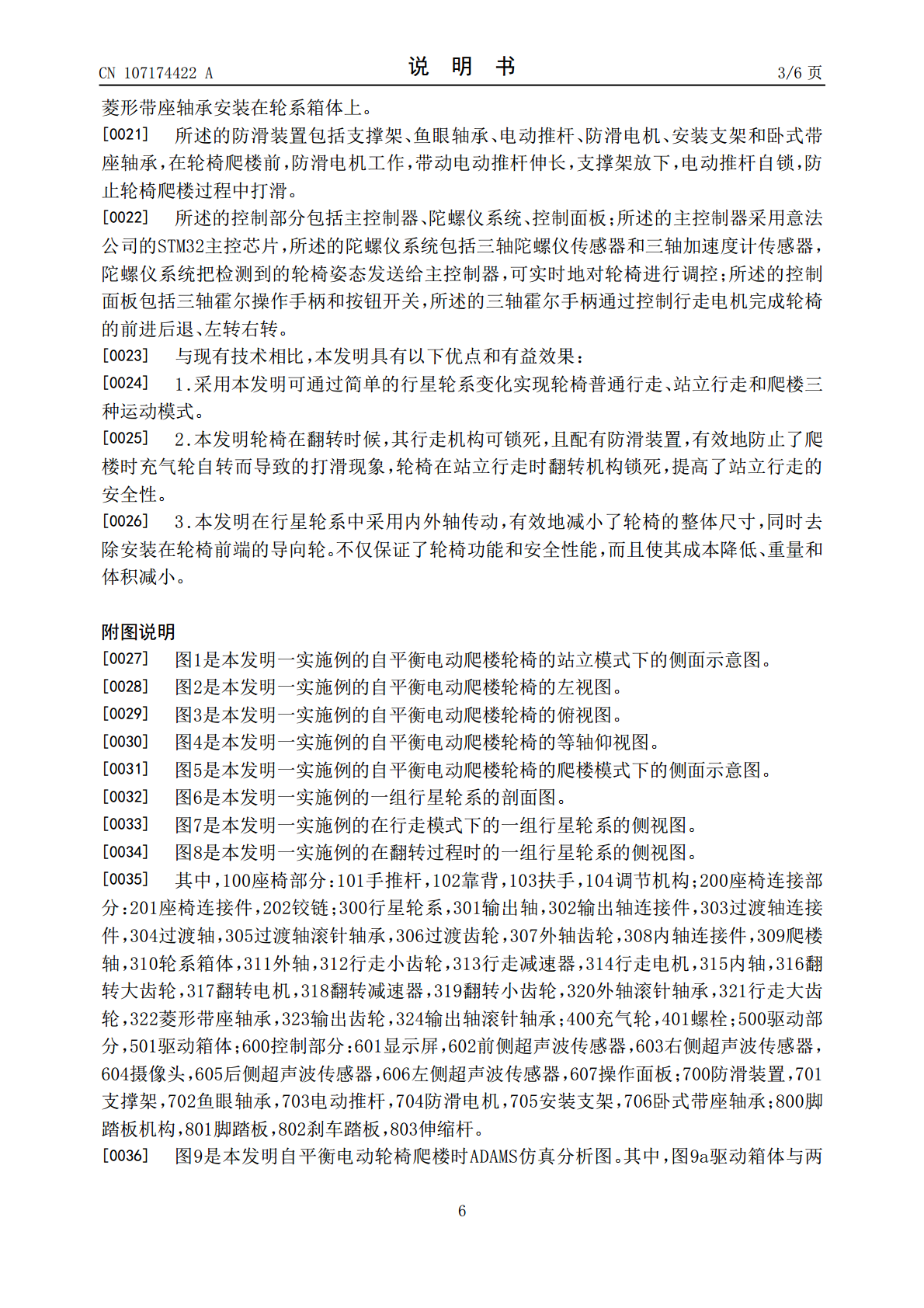
本发明公开了一种自平衡电动爬楼轮椅,包括座椅部分、驱动部分、防滑装置、行星轮系。驱动部分分为行走机构和翻转机构;为了使结构更加紧凑,行走机构和翻转机构采用内外轴的形式,通过控制不同电机工作,可经行星轮系变化可完成普通行走、站立行走和爬楼三种工作模式,轮椅在爬楼过程中行走机构被锁死,同时防滑支架放下,可有效防止轮椅的打滑现象。本发明还安装有陀螺仪系统,可实时将轮椅姿态传输到控制器,可自行控制座椅的位置,保证座椅处于水平位置。本发明可有效防止轮椅爬楼时的打滑现象,结构简单紧凑,成本低,并能适应各种不同的复杂路
一种自平衡爬楼轮椅.pdf
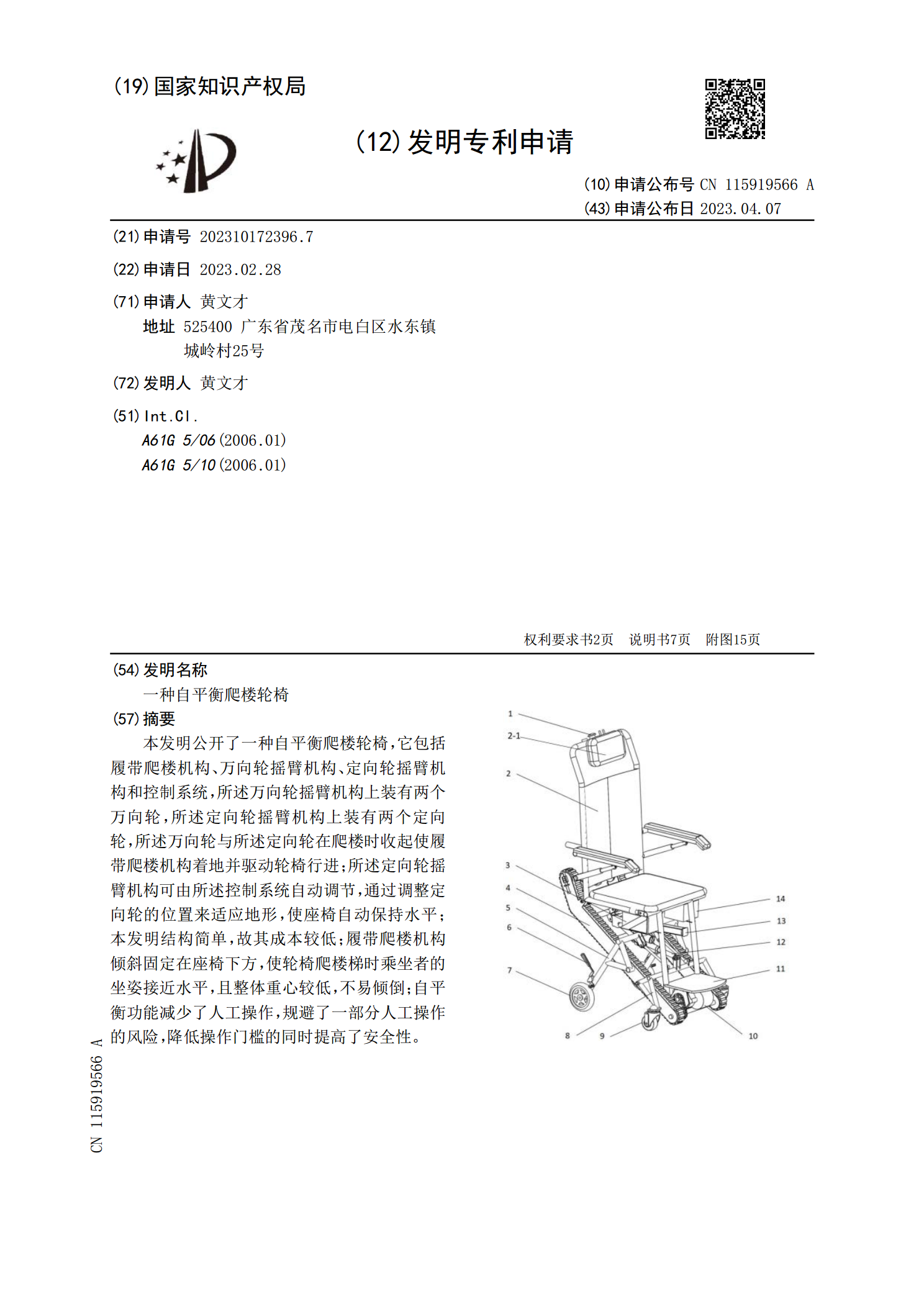
本发明公开了一种自平衡爬楼轮椅,它包括履带爬楼机构、万向轮摇臂机构、定向轮摇臂机构和控制系统,所述万向轮摇臂机构上装有两个万向轮,所述定向轮摇臂机构上装有两个定向轮,所述万向轮与所述定向轮在爬楼时收起使履带爬楼机构着地并驱动轮椅行进;所述定向轮摇臂机构可由所述控制系统自动调节,通过调整定向轮的位置来适应地形,使座椅自动保持水平;本发明结构简单,故其成本较低;履带爬楼机构倾斜固定在座椅下方,使轮椅爬楼梯时乘坐者的坐姿接近水平,且整体重心较低,不易倾倒;自平衡功能减少了人工操作,规避了一部分人工操作的风险,降

一种自平衡电动轮椅.pdf
本发明的一种自平衡电动轮椅,包括车体、两个后轮和两个前轮、方向驱动开关和轮毂电机锁定开关、两个脚踏板、两个轮毂电机、左右电动推杆和前后电动推杆、电池架和电池组、控制器、第一陀螺仪传感器和第二陀螺仪传感器、虎克铰、平衡座椅,本发明通过设置有左右电动推杆和前后电动推杆来随时保证平衡座椅处于水平位置,稳定性较高;通过设置有第一陀螺仪传感器和第二陀螺仪传感器,分别检测车体和平衡座椅的水平度,从而使本发明的效果得到了双重保障;本发明成本较低,适合市场推广。

一种自平衡电动轮椅.pdf
本发明的一种自平衡电动轮椅,包括车体、两个后轮和两个前轮、方向驱动开关和轮毂电机锁定开关、两个脚踏板、两个轮毂电机、左右电动推杆和前后电动推杆、电池架和电池组、控制器、第一陀螺仪传感器和第二陀螺仪传感器、虎克铰、平衡座椅,本发明通过设置有左右电动推杆和前后电动推杆来随时保证平衡座椅处于水平位置,稳定性较高;通过设置有第一陀螺仪传感器和第二陀螺仪传感器,分别检测车体和平衡座椅的水平度,从而使本发明的效果得到了双重保障;本发明成本较低,适合市场推广。

一种电动爬楼轮椅.pdf
本发明涉及一种电动爬楼轮椅,包括车架、扶手、驱动轮、驱动电机、转向轮和转向轮控制器。爬楼驱动机构包括牙圈、伸缩牙电动推杆、伸缩牙、轮毂连接法兰、偏心圆、限位板和轴套。牙圈通过连接角安装在驱动轮轮毂的内侧。牙圈上加工有伸缩孔,伸缩孔均匀分布在牙圈上,伸缩牙则安装在牙圈的伸缩孔内。偏心圆安装在驱动电机的电机轴上,通过限位板和轴套限位。伸缩辅助轮机构包括辅助轮架、剪式伸缩架、电动推杆、下导杆、辅助轮、上导杆和辅助轮。本发明通过伸缩牙使驱动轮能够更好地发挥爬升驱动力,驱动爬楼轮椅完成爬楼作业,使电动轮椅具有上下楼