
一种水质采样无人机的智能化水质采样方法.pdf

努力****凌芹

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水质采样无人机的智能化水质采样方法.pdf
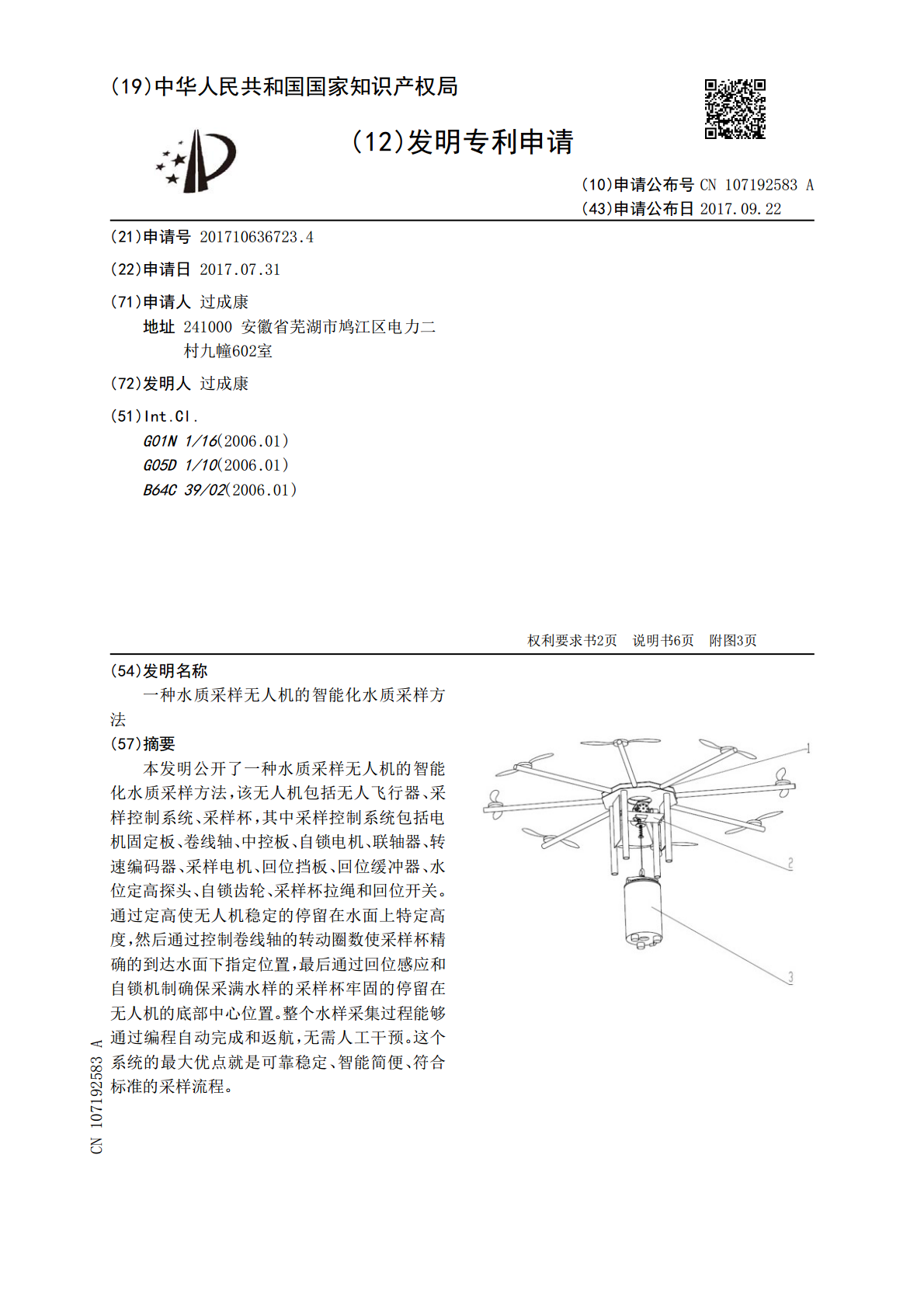
本发明公开了一种水质采样无人机的智能化水质采样方法,该无人机包括无人飞行器、采样控制系统、采样杯,其中采样控制系统包括电机固定板、卷线轴、中控板、自锁电机、联轴器、转速编码器、采样电机、回位挡板、回位缓冲器、水位定高探头、自锁齿轮、采样杯拉绳和回位开关。通过定高使无人机稳定的停留在水面上特定高度,然后通过控制卷线轴的转动圈数使采样杯精确的到达水面下指定位置,最后通过回位感应和自锁机制确保采满水样的采样杯牢固的停留在无人机的底部中心位置。整个水样采集过程能够通过编程自动完成和返航,无需人工干预。这个系统的最

一种富营养化水体水质采样无人机系统及其水质采样方法.pdf
本发明涉及无人机领域,公开了一种富营养化水体水质采样无人机系统及其水质采样方法。无人机系统包括无人飞行器和水质采样装置。无人飞行器设置有控制单元,控制单元用于控制无人飞行器的启停。水质采样装置,与控制单元电连接;水质采样装置包括安装支架、取水组件和喷气组件。当无人飞行器协同水质采样装置移动至目标取水点处时,首先启动喷气组件,气动移除目标取水点水体表面的干扰物;再启动取水组件中的采样泵,从而实现顺利采集到富营养化水体的水样部分而非干扰物部分,以避免了直接用采样泵采样导致水体表面的干扰物吸入并堵塞采样管、以及

一种水质采样环保无人机.pdf
本发明公开了一种水质采样环保无人机,其采样装置包括安装板、升降装置和转动样筒库;所述升降装置和转动样筒库安装在所述安装板上;所述升降装置的运动终端通过固定板安装有第一转动装置;所述转动样筒库内设置有若干个采样筒;所述第一转动装置依次驱动所述转动样筒库内的采样筒进行采样,实现在无人机一次飞行过程中完成多点采样;本发明采用销轴与回形缺口配合实现可拆卸卡接,以使第一转动装置与连接座自动配合,将采样筒从转动盘上取出并下降至采样水面;本发明在采样筒内设置活塞,通过真空抽取的方式将污水抽取至采样筒内,避免管路堵塞及滋

一种智能化基于水质采样的无人机系统.pdf
本发明公开了一种智能化基于水质采样的无人机系统,包括无人飞行器、采样控制系统、采样杯,其中采样控制系统包括电机固定板、卷线轴、中控板、自锁电机、联轴器、转速编码器、采样电机、回位挡板、回位缓冲器、水位定高探头、自锁齿轮、采样杯拉绳和回位开关。通过定高使无人机稳定的停留在水面上特定高度,然后通过控制卷线轴的转动圈数使采样杯精确的到达水面下指定位置,最后通过回位感应和自锁机制确保采满水样的采样杯牢固的停留在无人机的底部中心位置。整个水样采集过程能够通过编程自动完成和返航,无需人工干预。这个系统的最大优点就是可

一种用于水质采样的无人机.pdf
本发明公开了一种用于水质采样的无人机,包括无人机本体,所述无人机本体的顶部一侧外壁设置有支撑架,且支撑架的数量为四个,所述支撑架的顶部一侧外壁设置有电机外壳,且电机外壳的底部内壁设置有驱动电机,所述驱动电机的输出轴设置有转动杆,且转动杆的外壁设置有螺旋桨叶,所述无人机本体底部外壁的中间位置设置有安装架,且安装架的底部外壁设置有固定框,所述固定框顶部内壁的中间位置设置有液压缸,且液压缸的底部内壁设置有伸缩杆。本发明调节无人机整体高度,防止无人机摔坏,使储水腔内部形成负压进行采样,保障在采样过程中无人机的稳定