
一种非接触式速度传感器测试装置.pdf

纪阳****公主

1/6

2/6

3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种非接触式速度传感器测试装置.pdf
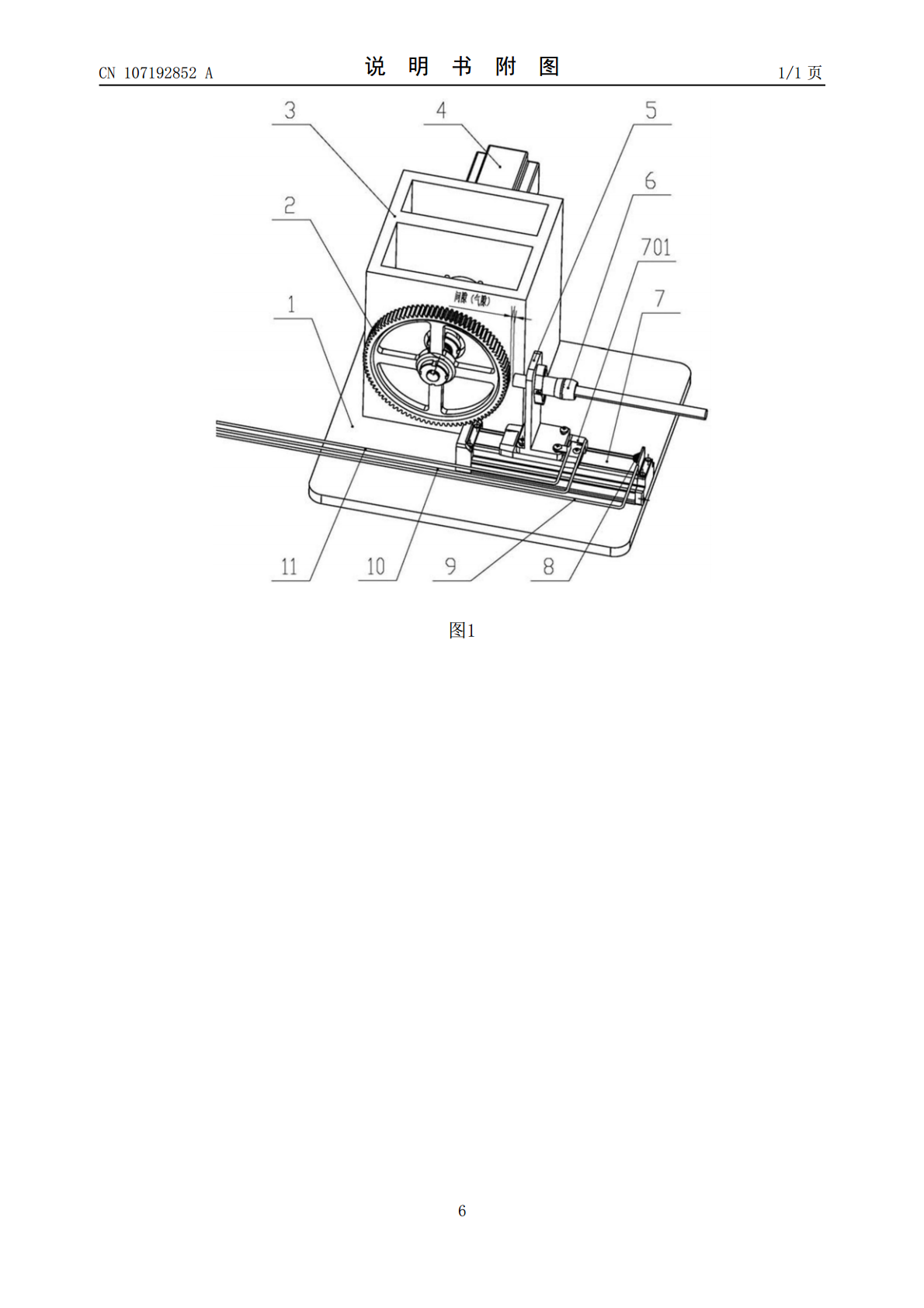
本发明涉及一种非接触式速度传感器测试装置,包括底板、测速齿轮、伺服电机、直线滑台、电线,所述的伺服电机通过内置有传动组件的安装座将软件设定的转速值传递到测速齿轮;所述的速度传感器固定在传感器安装座上,传感器安装座固定在拖板上,直线滑台通过软件和内置步进电机驱动拖板移动,从而改变速度传感器与测速齿轮的气隙;所述的电线包括第一电线、第二电线、第三电线,第一电线通过压接端子并用螺钉紧固在弹簧固定座上,第二电线通过压接端子并用螺钉紧固在拖板上,第三电线通过压接端子并用螺钉紧固在传感器安装座上;本发明能够预先设定各

一种非接触式霍尔磁感应型机轮速度传感器.pdf
本发明公开了一种非接触式霍尔磁感应型机轮速度传感器,包括安装在机轮上的感应组件和磁钢座组件,所述感应组件通过螺钉A固定在起落架上,所述磁钢座组件通过螺钉B安装在的端面上,所述感应组件上分别装有一个插头和尾附件;所述感应组件和磁钢座组件的相对端面设置有间隙,其间隙的大小通过设置于端面的调整垫圈A和设置于内部的调整垫圈B的厚度进行调节。本发明通过在磁钢座组件与感应组件轴向设置间隙,从而避免因飞机受振动、冲击及加速度等抗干扰时对传感器输出信号的影响;同时利用感应组件中的霍尔元器件感应磁钢座的磁钢变化的磁电转化模

非接触式机车光电速度传感器故障分析与对策.docx
非接触式机车光电速度传感器故障分析与对策摘要:非接触式机车光电速度传感器是现代机车中用来检测牵引电机转速并发送信号控制机车速度的重要传感器。然而,在实际应用中,由于各种原因,其往往容易发生故障。本文将从机车光电速度传感器的工作原理出发,分析常见的故障原因及对策。关键词:非接触式机车光电速度传感器;故障;对策一、引言机车光电速度传感器是现代机车中一个至关重要的传感器,用来检测牵引电机转速并发送信号控制机车速度。早期机车使用的是接触式传感器,但是由于其不稳定、易损坏等缺点,使得非接触式传感器逐渐成为机车中的主
一种非接触式磁传感器.pdf
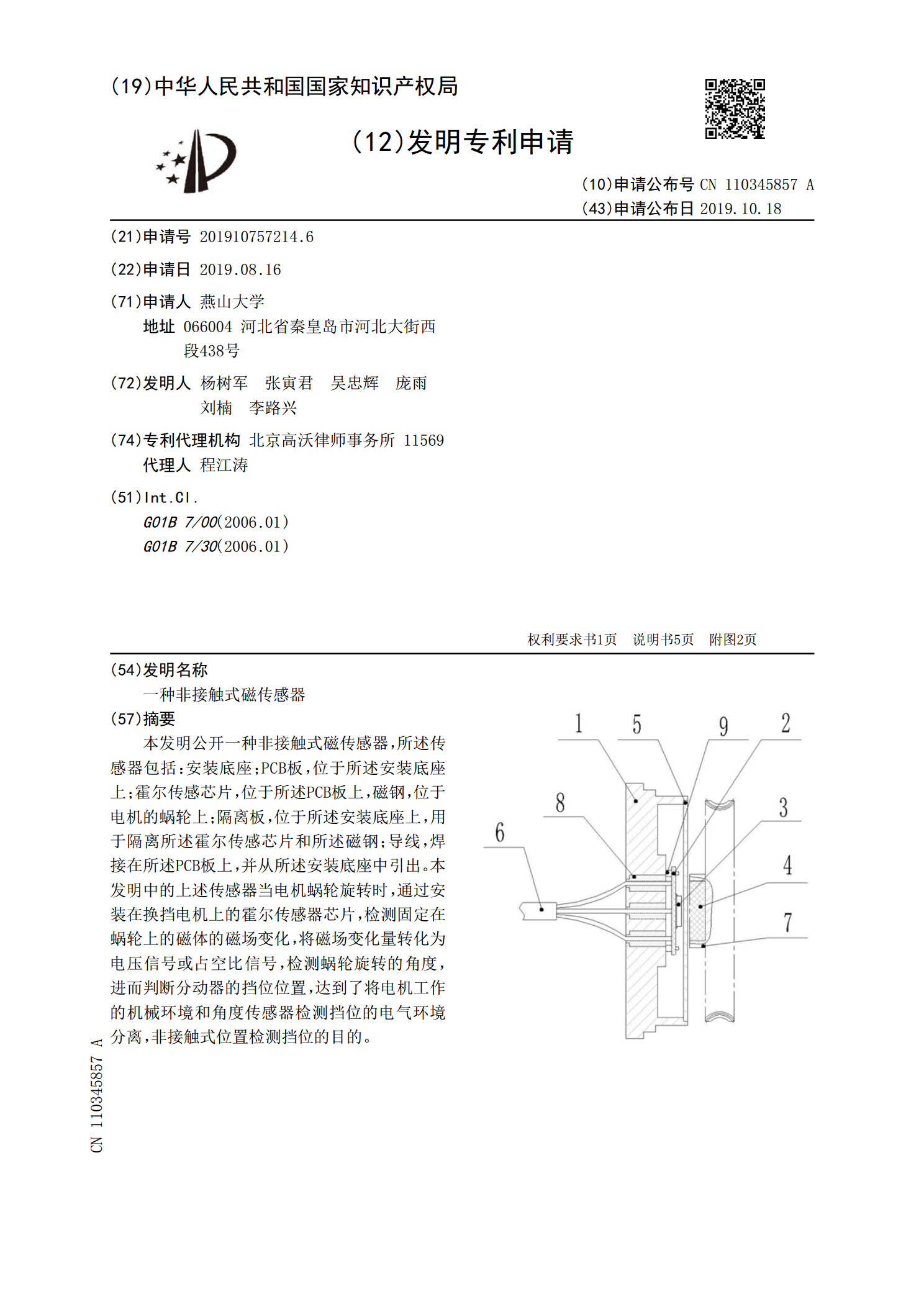
本发明公开一种非接触式磁传感器,所述传感器包括:安装底座;PCB板,位于所述安装底座上;霍尔传感芯片,位于所述PCB板上,磁钢,位于电机的蜗轮上;隔离板,位于所述安装底座上,用于隔离所述霍尔传感芯片和所述磁钢;导线,焊接在所述PCB板上,并从所述安装底座中引出。本发明中的上述传感器当电机蜗轮旋转时,通过安装在换挡电机上的霍尔传感器芯片,检测固定在蜗轮上的磁体的磁场变化,将磁场变化量转化为电压信号或占空比信号,检测蜗轮旋转的角度,进而判断分动器的挡位位置,达到了将电机工作的机械环境和角度传感器检测挡位的电气
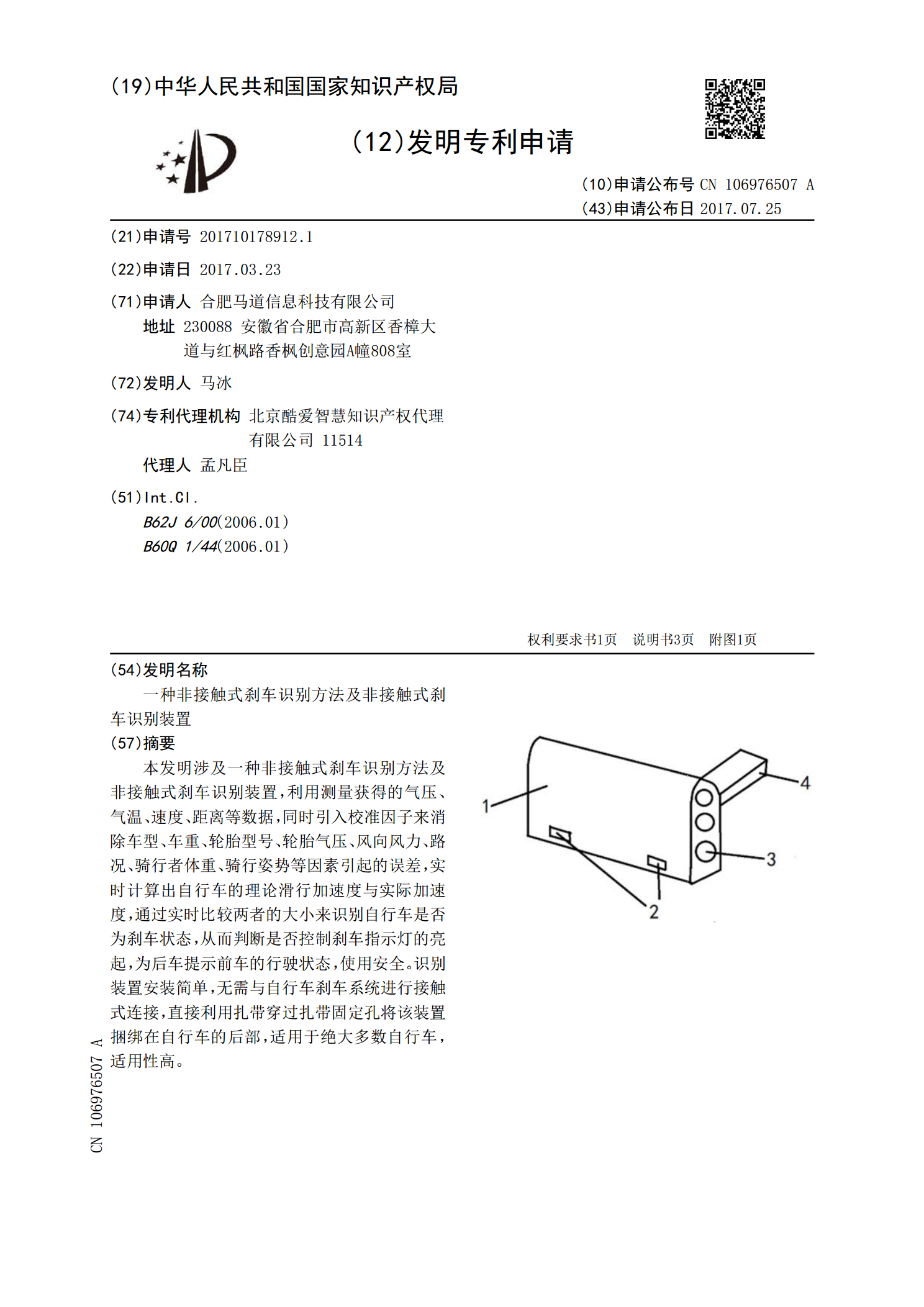
一种非接触式刹车识别方法及非接触式刹车识别装置.pdf
本发明涉及一种非接触式刹车识别方法及非接触式刹车识别装置,利用测量获得的气压、气温、速度、距离等数据,同时引入校准因子来消除车型、车重、轮胎型号、轮胎气压、风向风力、路况、骑行者体重、骑行姿势等因素引起的误差,实时计算出自行车的理论滑行加速度与实际加速度,通过实时比较两者的大小来识别自行车是否为刹车状态,从而判断是否控制刹车指示灯的亮起,为后车提示前车的行驶状态,使用安全。识别装置安装简单,无需与自行车刹车系统进行接触式连接,直接利用扎带穿过扎带固定孔将该装置捆绑在自行车的后部,适用于绝大多数自行车,适用