
用于旋转机械的转子的引导装置.pdf

海昌****姐淑

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于旋转机械的转子的引导装置.pdf
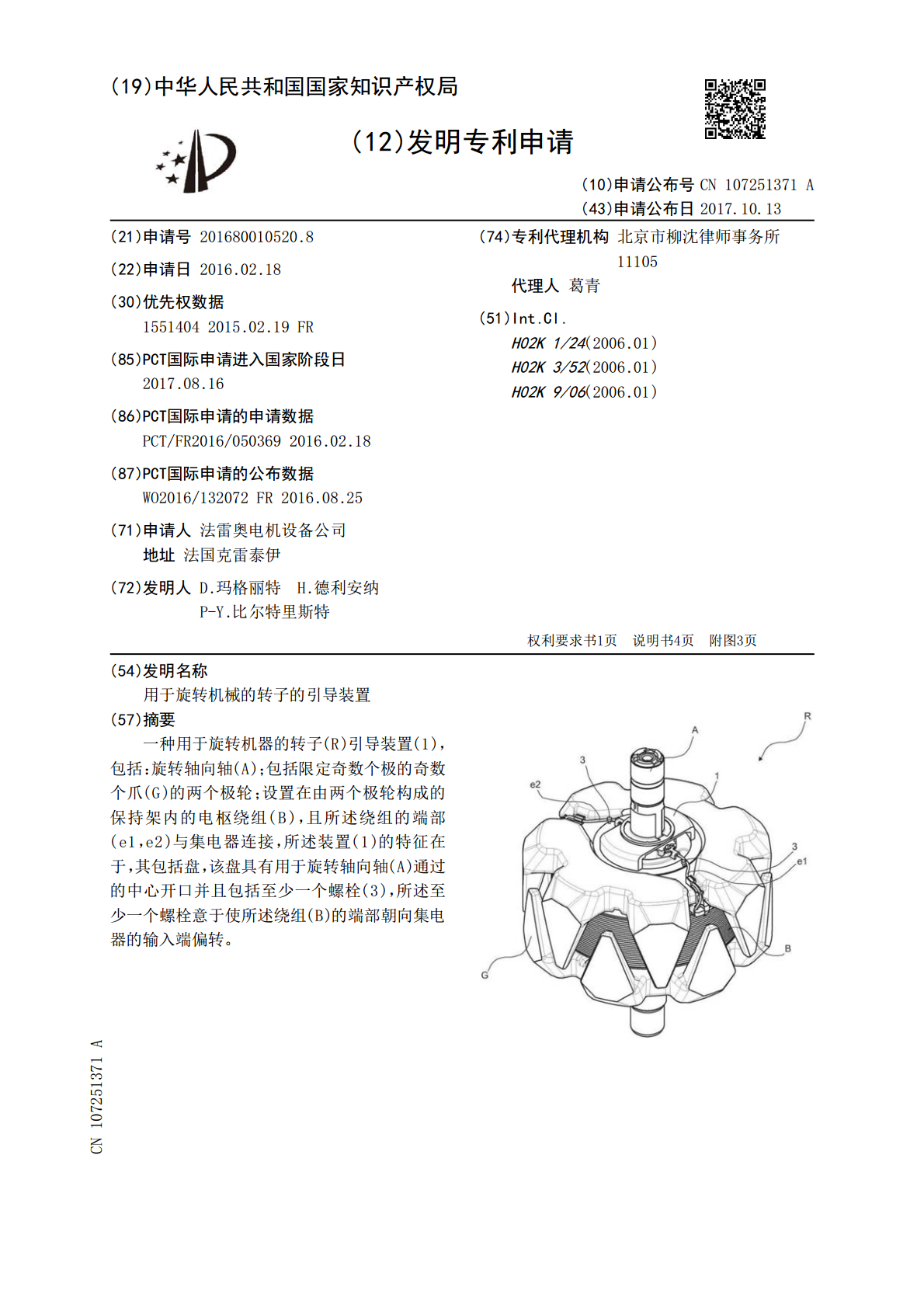
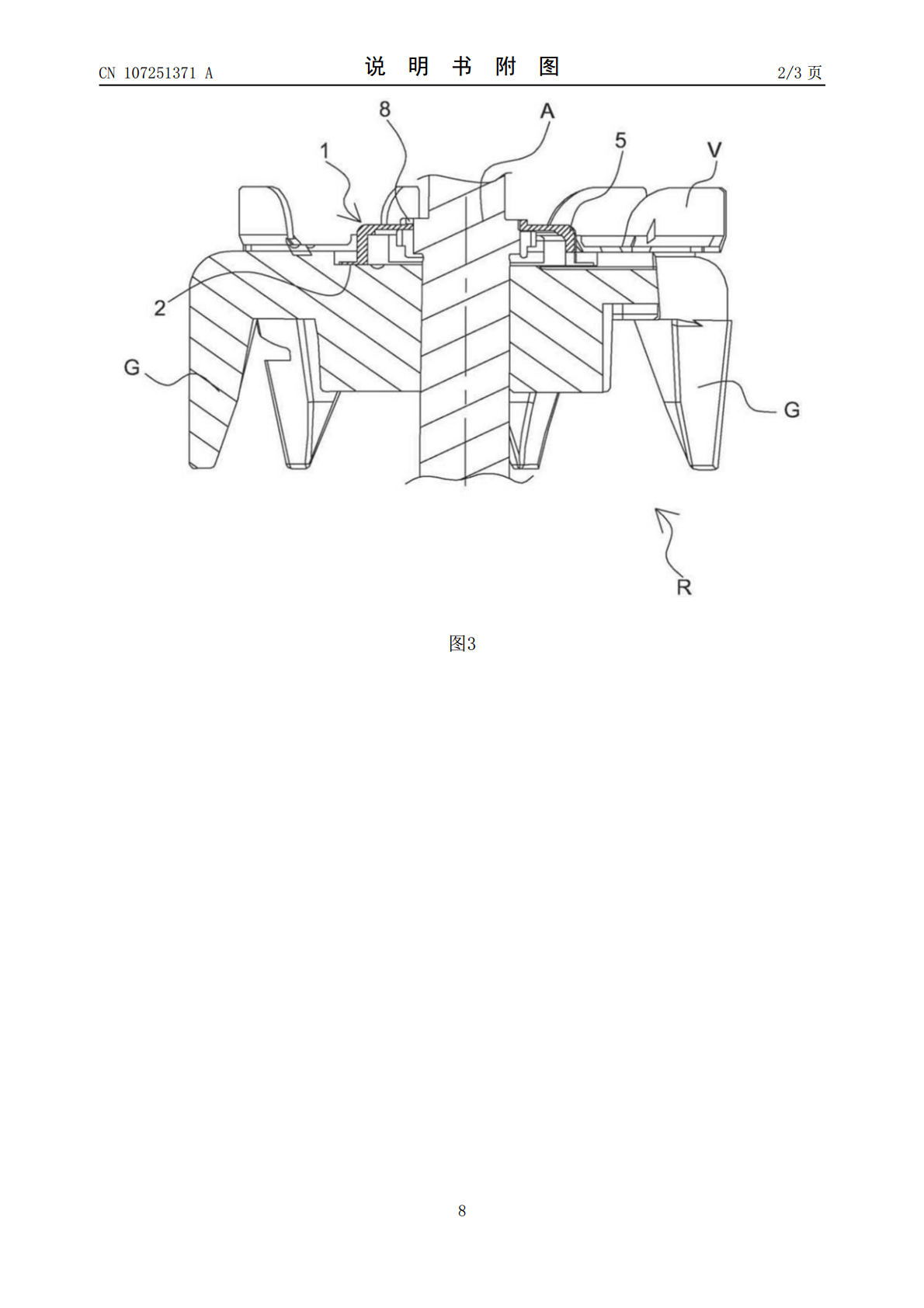
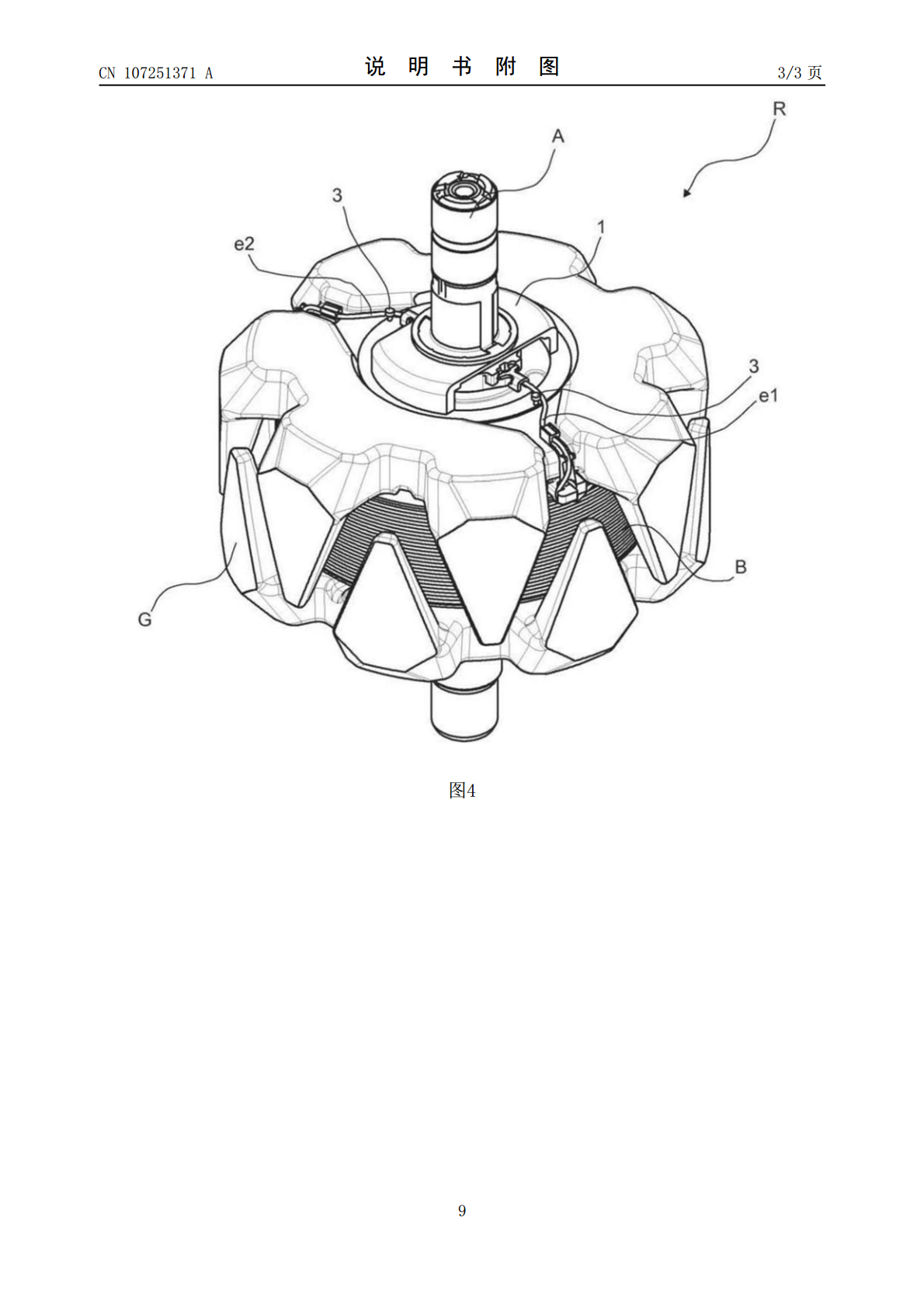
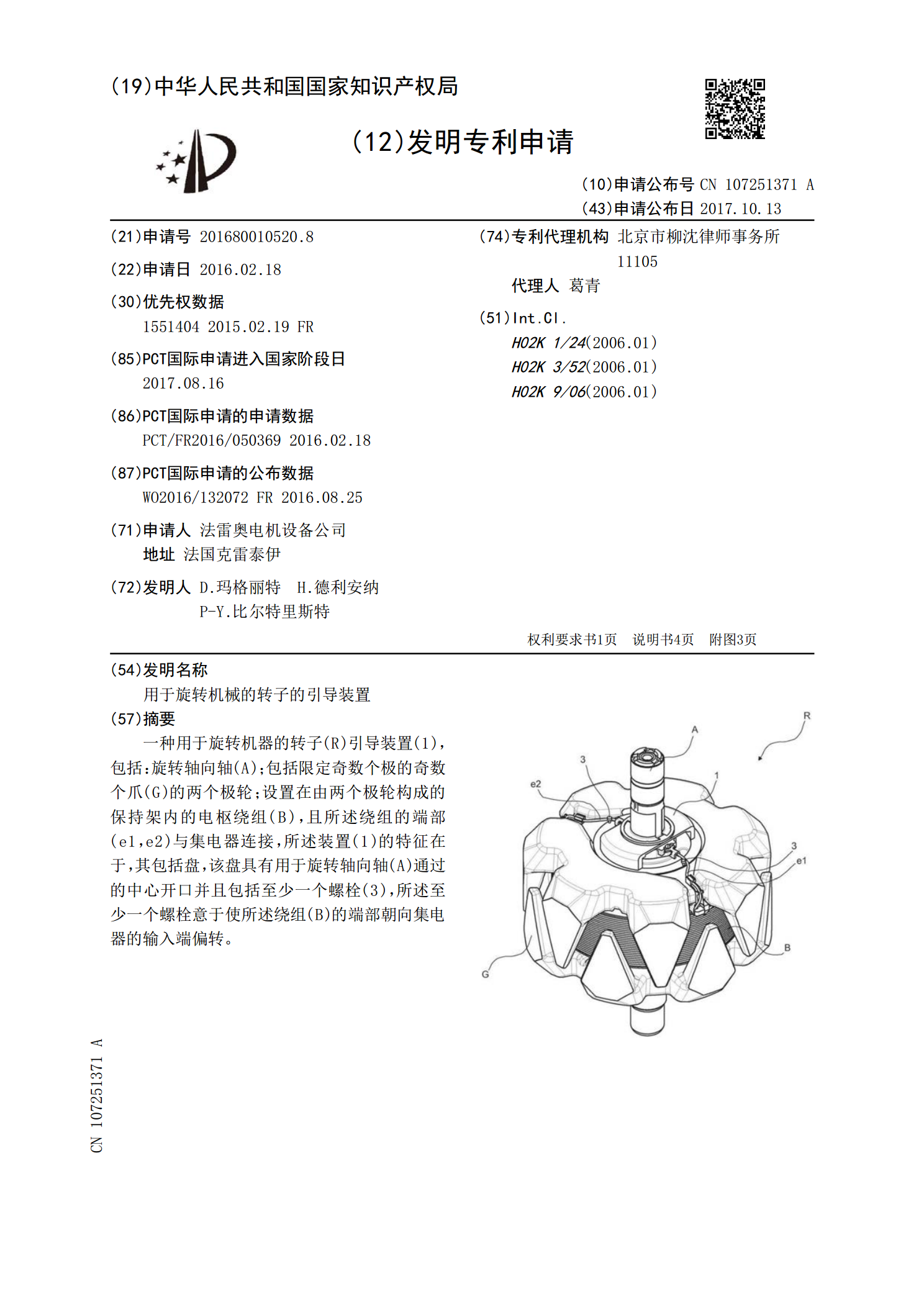
一种用于旋转机器的转子(R)引导装置(1),包括:旋转轴向轴(A);包括限定奇数个极的奇数个爪(G)的两个极轮;设置在由两个极轮构成的保持架内的电枢绕组(B),且所述绕组的端部(e1,e2)与集电器连接,所述装置(1)的特征在于,其包括盘,该盘具有用于旋转轴向轴(A)通过的中心开口并且包括至少一个螺栓(3),所述至少一个螺栓意于使所述绕组(B)的端部朝向集电器的输入端偏转。

用于旋转电机的转子.pdf
本发明提出一种用于旋转电机的转子,该转子装配成围绕轴线(X)旋转,并包括一对磁轮(17),每个磁轮具有凸缘(18)和多个磁极(19)。每个磁极(19)从凸缘(18)朝向自由端部(26)轴向延伸并具有外表面(27)。所述至少一个磁轮(17)的至少一个磁极(19)的外表面(27)具有至少一个减小区段(29)。所述减小区段(29)被构造成使得所述外表面(27)和所述转子(4)的轴线(X)之间的半径在沿着所述减小区段(29)朝向所述磁极(19)的自由端部(26)行进时减小。
用于旋转机的被平衡的转子及用于使转子平衡的方法.pdf
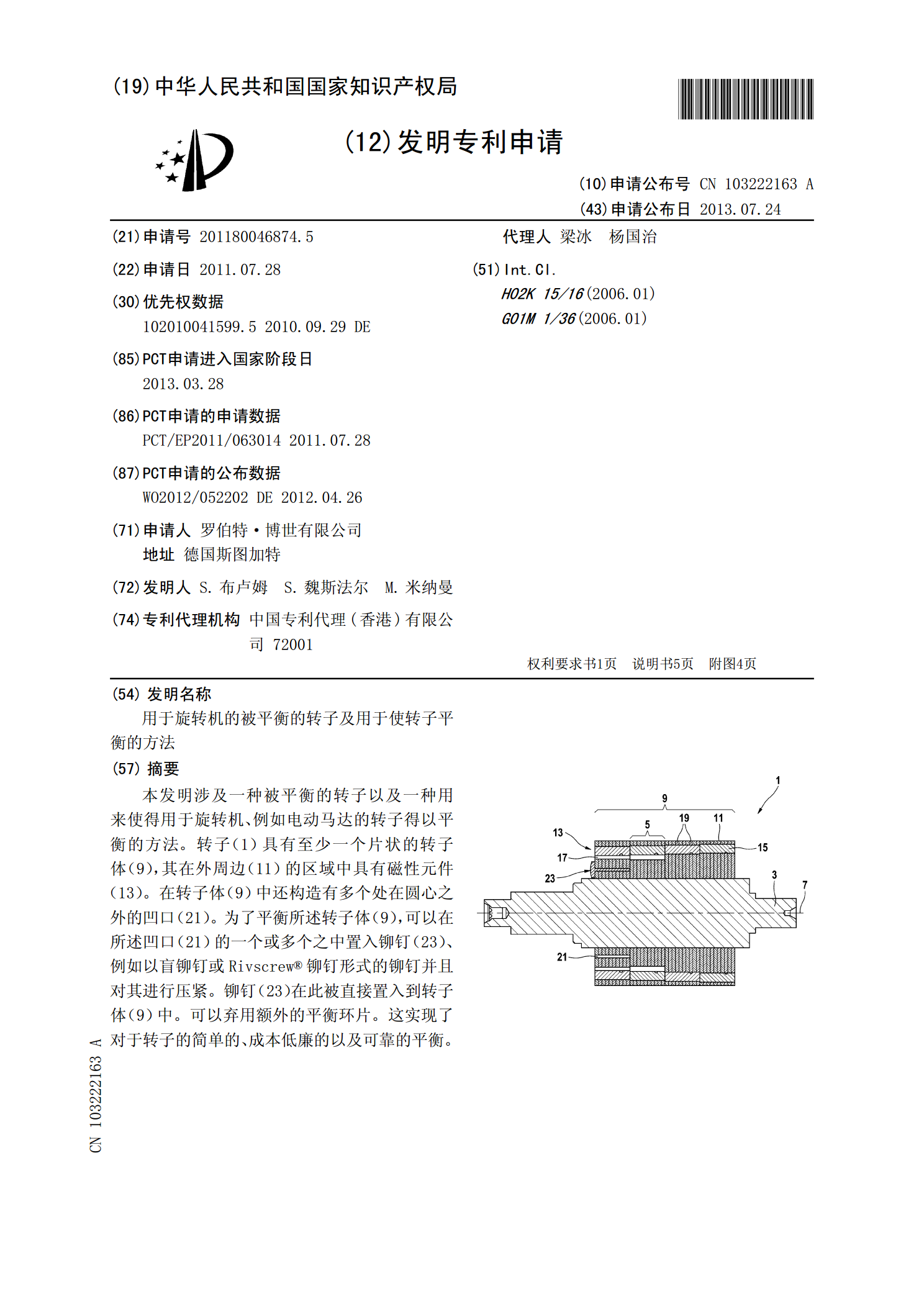
本发明涉及一种被平衡的转子以及一种用来使得用于旋转机、例如电动马达的转子得以平衡的方法。转子(1)具有至少一个片状的转子体(9),其在外周边(11)的区域中具有磁性元件(13)。在转子体(9)中还构造有多个处在圆心之外的凹口(21)。为了平衡所述转子体(9),可以在所述凹口(21)的一个或多个之中置入铆钉(23)、例如以盲铆钉或Rivscrew?铆钉形式的铆钉并且对其进行压紧。铆钉(23)在此被直接置入到转子体(9)中。可以弃用额外的平衡环片。这实现了对于转子的简单的、成本低廉的以及可靠的平衡。

用于对中和引导涡轮引擎轴旋转的装置.pdf
一种用于对中与引导涡轮引擎轴(112)的旋转的装置(100),该装置包括围绕该轴安装,并分别由第一和第二柔性环形支撑件(120,118)承载的滚柱轴承(116)和球轴承(114),以及一油膜压力减震器(139),该油膜压力减震器具有一围绕该滚柱轴承设置的刚性环形支撑件(140),所述球轴承支撑件、该减震器的环形支撑件以及所述滚柱轴承横向堆叠,彼此围绕地延伸。
用于旋转电机的转子和旋转电机.pdf
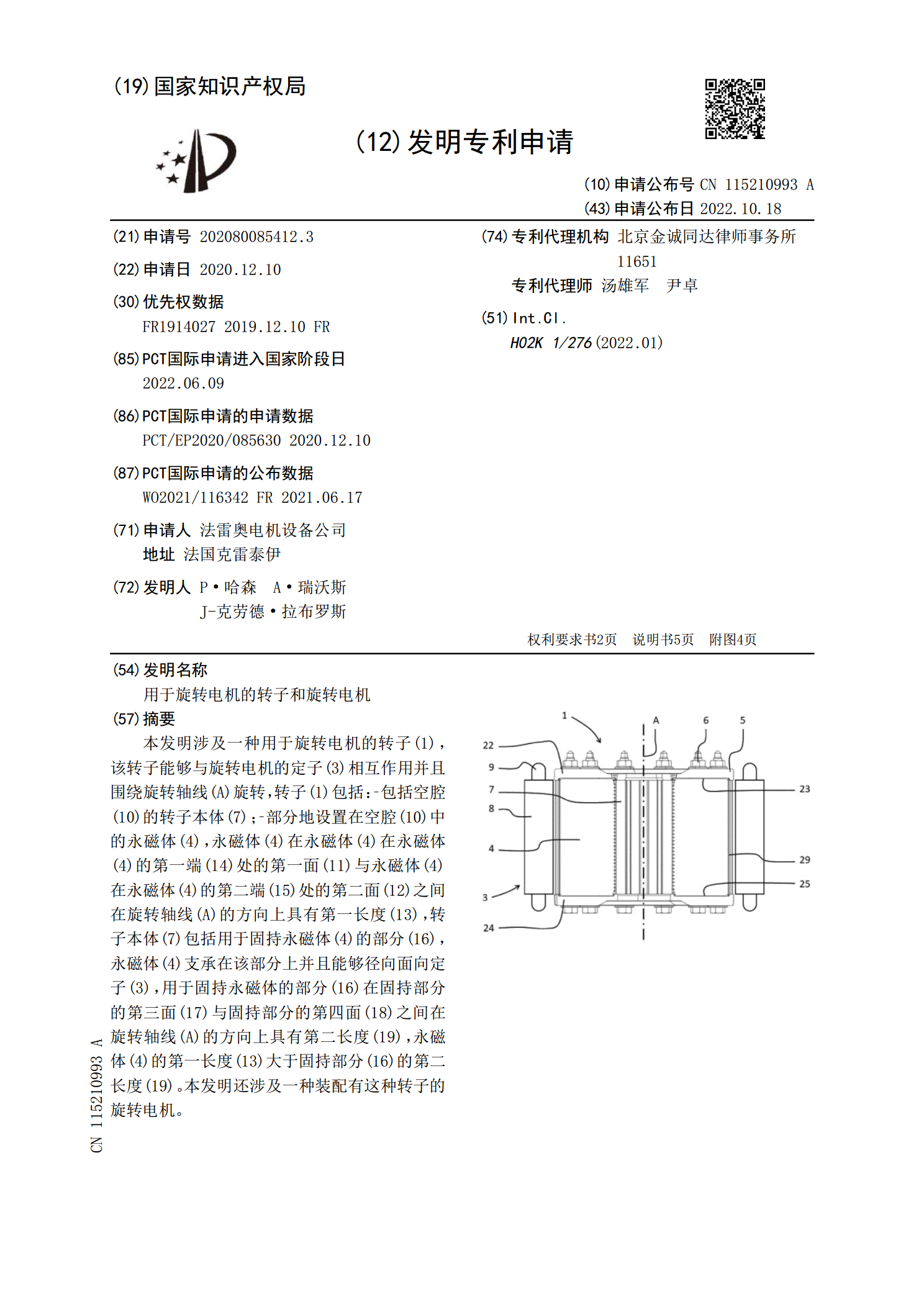
本发明涉及一种用于旋转电机的转子(1),该转子能够与旋转电机的定子(3)相互作用并且围绕旋转轴线(A)旋转,转子(1)包括:?包括空腔(10)的转子本体(7);?部分地设置在空腔(10)中的永磁体(4),永磁体(4)在永磁体(4)在永磁体(4)的第一端(14)处的第一面(11)与永磁体(4)在永磁体(4)的第二端(15)处的第二面(12)之间在旋转轴线(A)的方向上具有第一长度(13),转子本体(7)包括用于固持永磁体(4)的部分(16),永磁体(4)支承在该部分上并且能够径向面向定子(3),用于固持永磁