
套管柔性针穿刺医疗机器人系统.pdf

冷霜****魔王

1/7

2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

套管柔性针穿刺医疗机器人系统.pdf
本发明公开了一种套管柔性针穿刺医疗机器人系统,包括:外套管伺服电机、丝杠直线导轨、外套管伺服电机基座、皮带轮、皮带、滚珠轴承、力传感器连接轴、压力传感器、套管夹头、夹头与轴连接机构、套管支撑基座、柔性针伺服电机基座、皮带轮、皮带、滚珠轴承、力传感器连接轴、压力传感器、柔性针夹头、夹头与轴连接机构、柔性针支撑基座、摄像头、运动控制电路;本发明套管柔性针机器人系统具有四个自由度,可以改变柔性针的穿刺弧形轨迹,使得柔性针能避开一些障碍物和重要的器官准确、灵活地到达病灶处。本发明的套管柔性针机器人穿刺系统能实时地

机器人辅助柔性针穿刺系统研究.docx
机器人辅助柔性针穿刺系统研究标题:机器人辅助柔性针穿刺系统研究摘要:随着医疗技术的不断进步,针刺技术在临床中的应用越来越广泛。然而,传统的针刺技术受到人手的限制,术者技能的差异和诸多外界因素的干扰,造成手术风险增大和成功率下降。机器人技术的引入可以有效地解决这些问题。本文通过研究机器人辅助柔性针穿刺系统,从系统结构、关键技术和临床应用等方面进行综述,以期为机器人辅助针刺系统的进一步研究提供参考。1.引言针刺技术一直是医学领域中最基本和重要的技术之一。针刺技术的准确性和稳定性对手术结果产生重要影响。然而,人

套管针穿刺.doc
留置针穿刺法一、目的1、补充水份和电解质,维持酸碱平衡。2、增加血容量维持血压,改善微循环。3、静脉给药达到各种治疗目的。4、给予静脉营养支持,供给热能、营养物质二、留置针输液的优点1、适用于长期输液保护患者静脉,避免反复穿刺带来的痛苦。2、随时保持通畅的静脉通道,便于急救和给药。三、留置针结构1、针头部:为软硅胶导管后接回血室。2、不锈钢针芯3、肝素帽,可容纳肝素。四、用物1、注射盘及用物:镊子罐、污物罐、砂锯、复合消毒碘棉签2、静脉留置针3、输液固定贴膜4、止血带5、垫巾6、输液架7、输液器8、小桶1
一种基于齿轮传动的套管柔性针同步穿刺机构.pdf
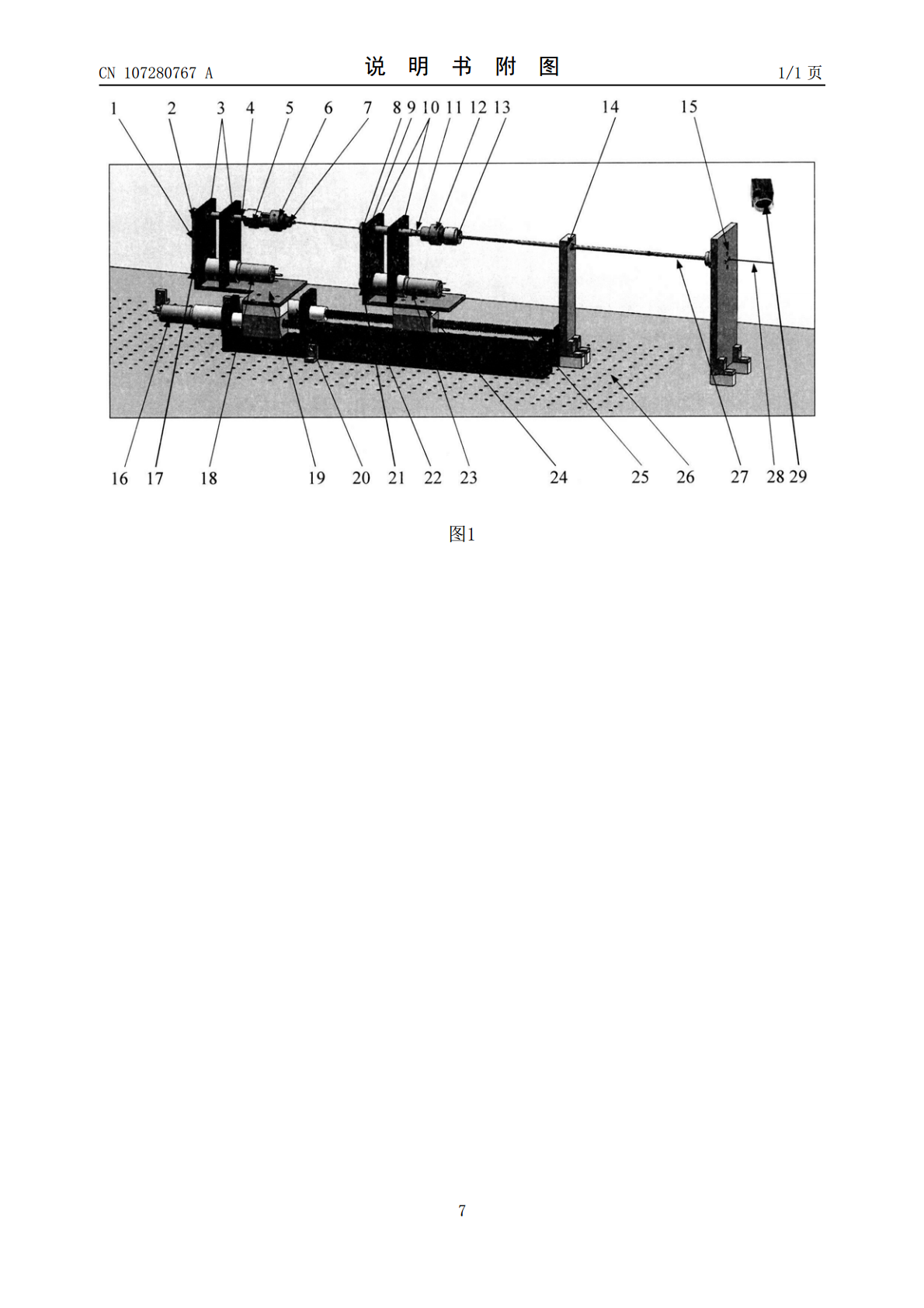
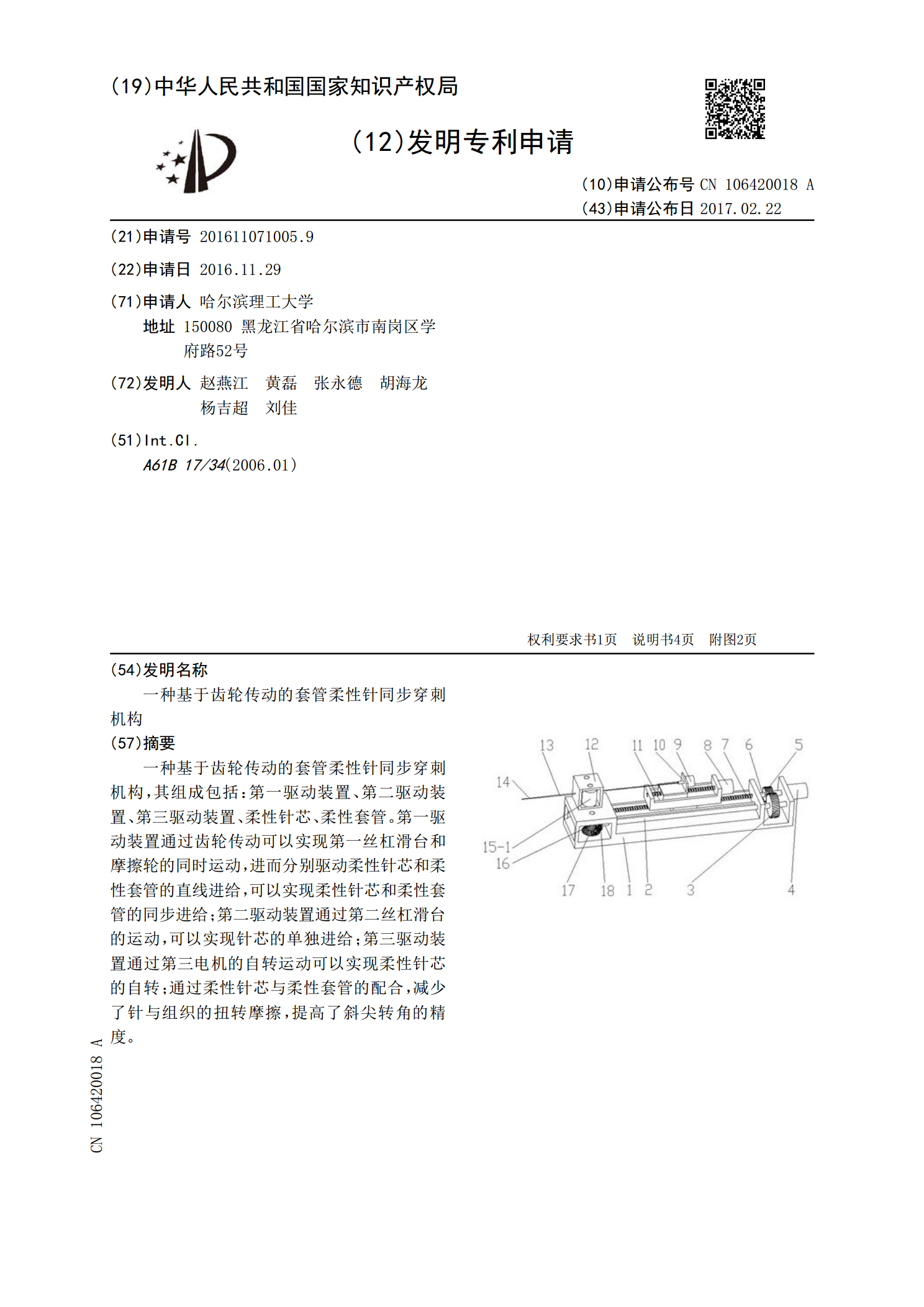
一种基于齿轮传动的套管柔性针同步穿刺机构,其组成包括:第一驱动装置、第二驱动装置、第三驱动装置、柔性针芯、柔性套管。第一驱动装置通过齿轮传动可以实现第一丝杠滑台和摩擦轮的同时运动,进而分别驱动柔性针芯和柔性套管的直线进给,可以实现柔性针芯和柔性套管的同步进给;第二驱动装置通过第二丝杠滑台的运动,可以实现针芯的单独进给;第三驱动装置通过第三电机的自转运动可以实现柔性针芯的自转;通过柔性针芯与柔性套管的配合,减少了针与组织的扭转摩擦,提高了斜尖转角的精度。

螺旋形穿刺套管针.pdf
本发明公开了螺旋形穿刺套管针,包括筒柱、支杆和套筒,所述支杆设于所述筒柱的顶部,所述套筒设于所述支杆的上方,所述支杆与所述套筒螺纹连接,所述筒柱的表面设有螺旋形的凹槽,所述凹槽内套有螺旋形并且具有弹性的第一套管,所述第一套管内设有与之端部相连并且具有弹性的第二套管,所述第二套管的外壁设有粘附层,所述第二套管内设有穿刺针,所述穿刺针上设有用于进气的输气管,所述输气管上设有与之相连通的气囊,所述伸缩杆设于所述筒柱的顶部,所述伸缩杆上设有第一固定杆,所述第一固定杆上设有第二固定杆,所述第二固定杆与所述第一套管相