
一种锥—杆式对接机构.pdf

婀娜****aj

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
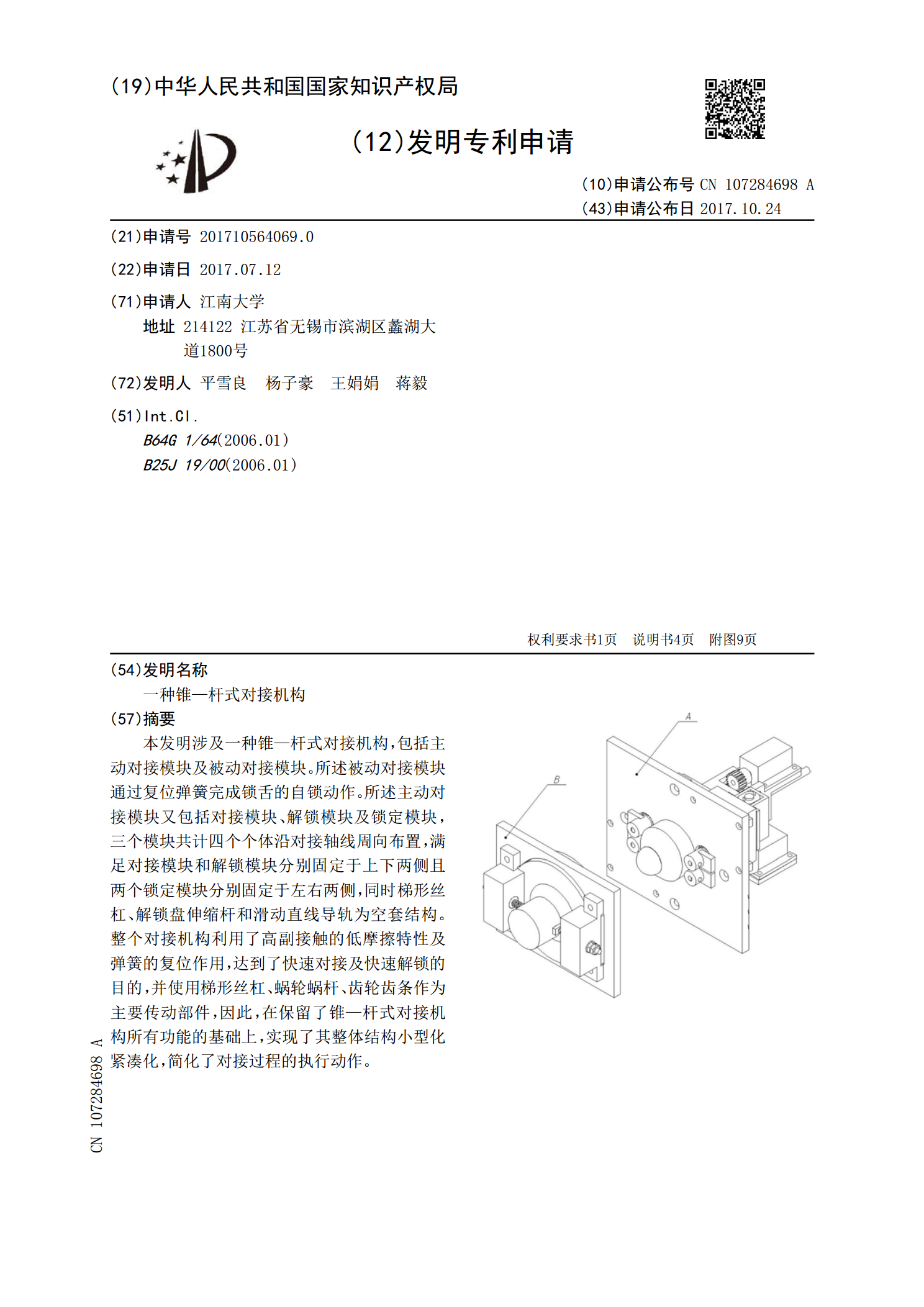
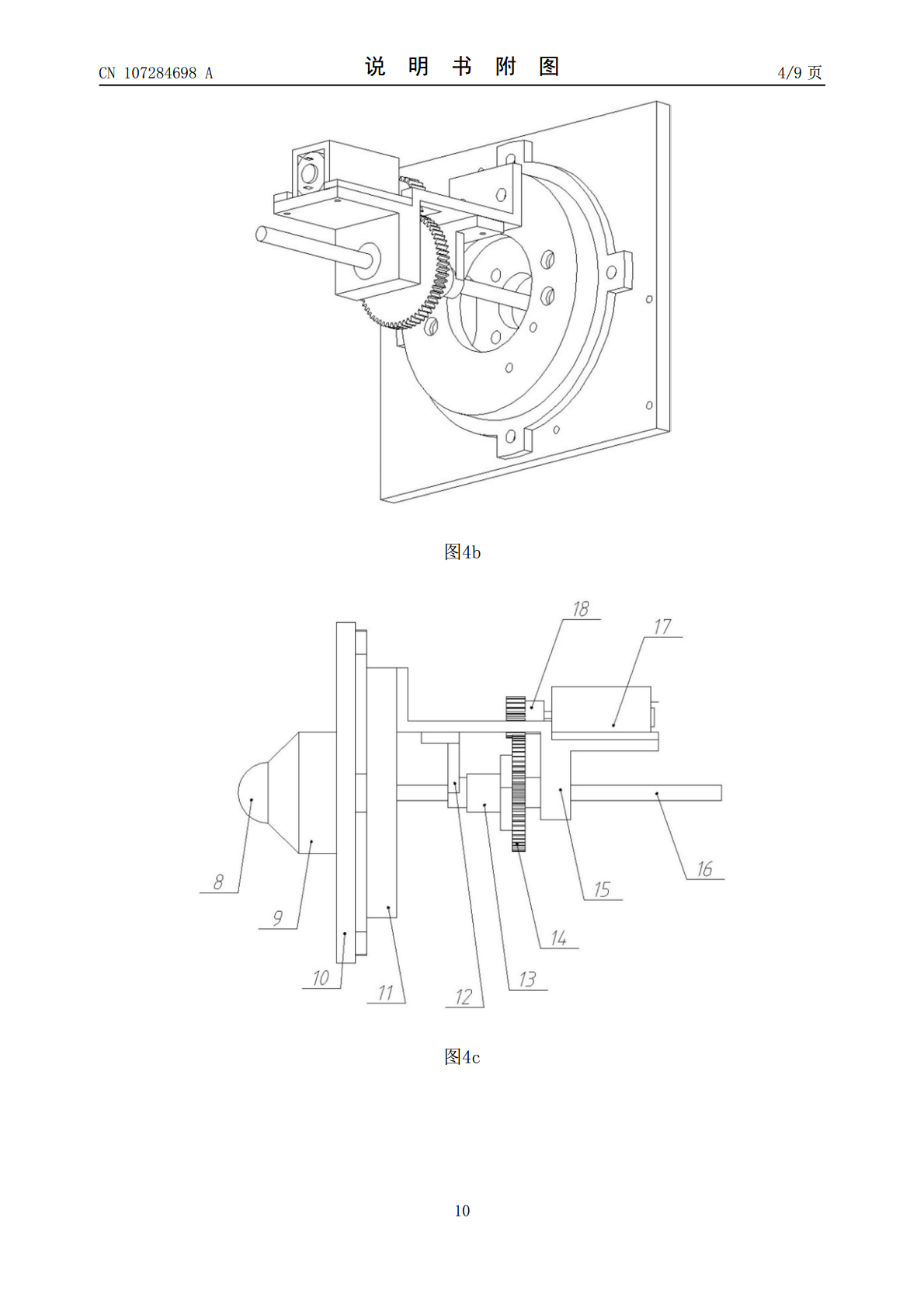
一种锥—杆式对接机构.pdf
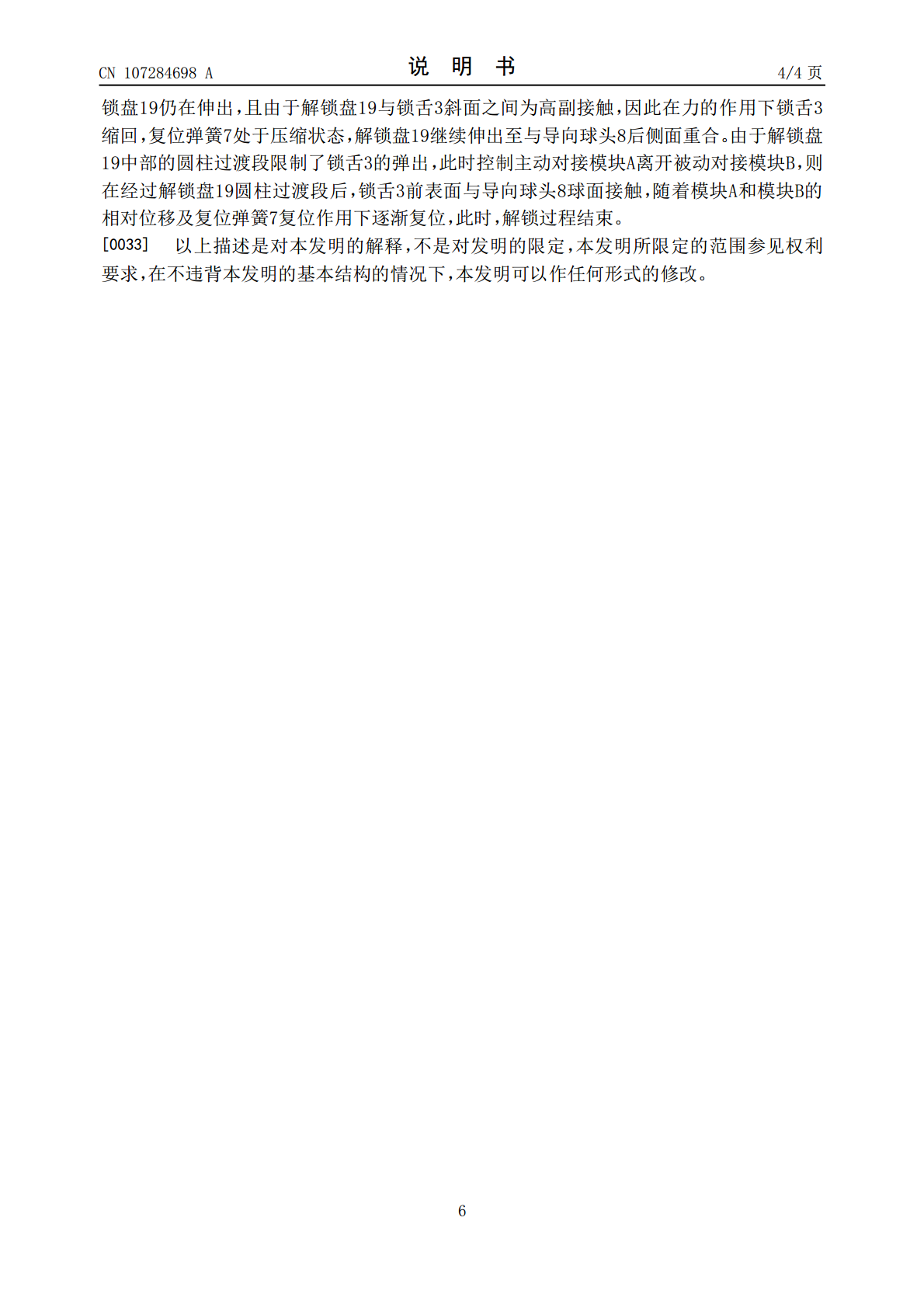
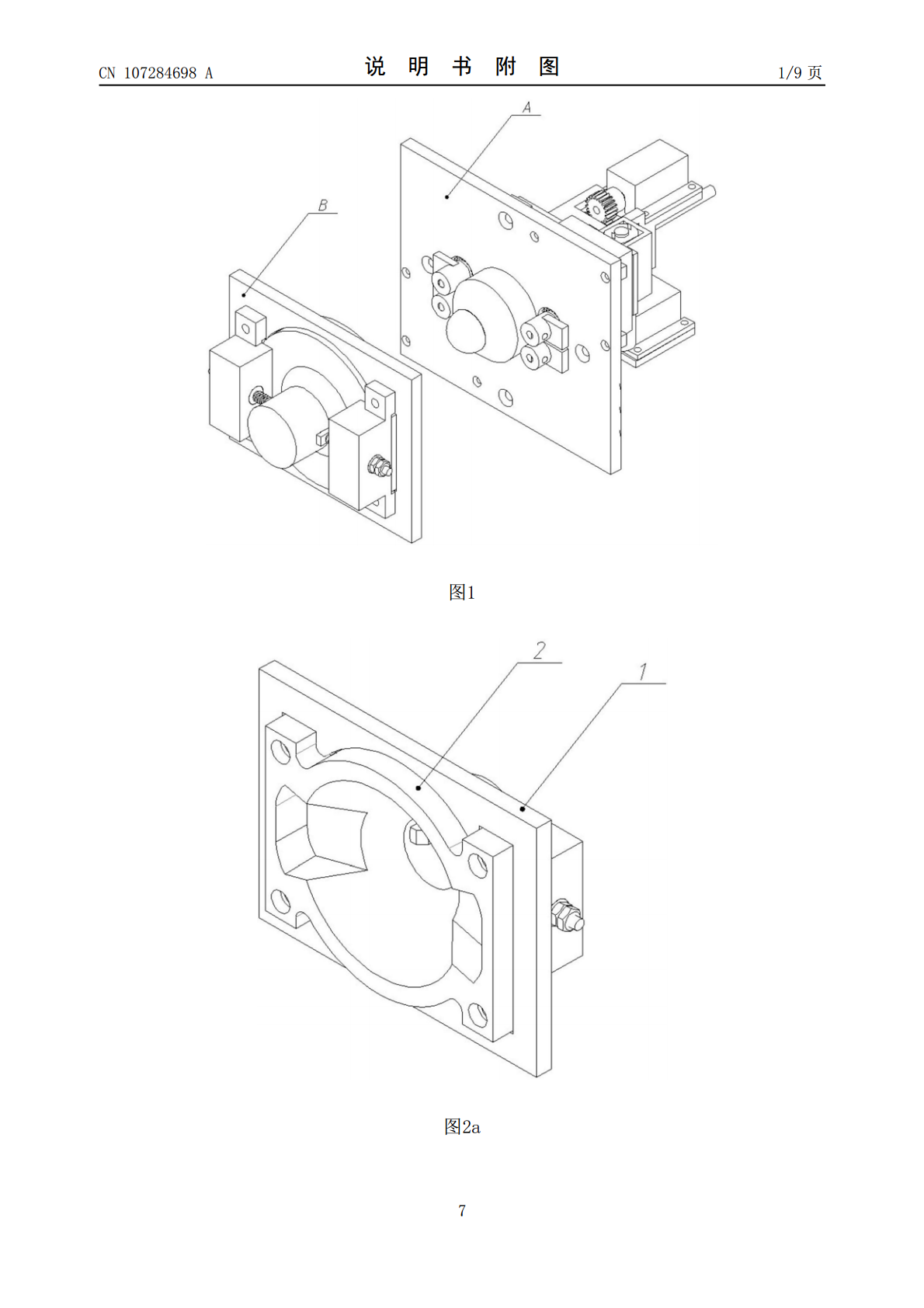
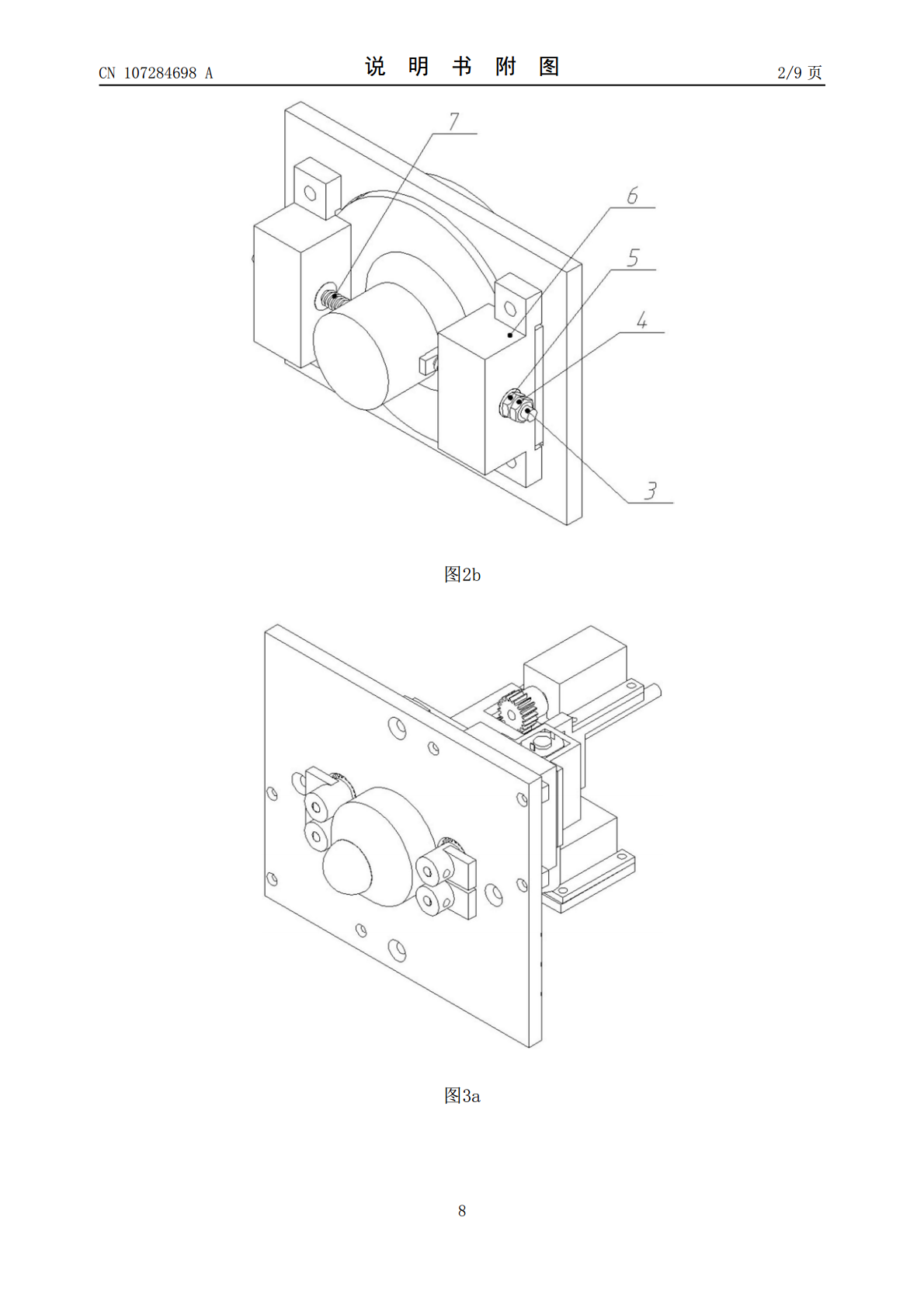
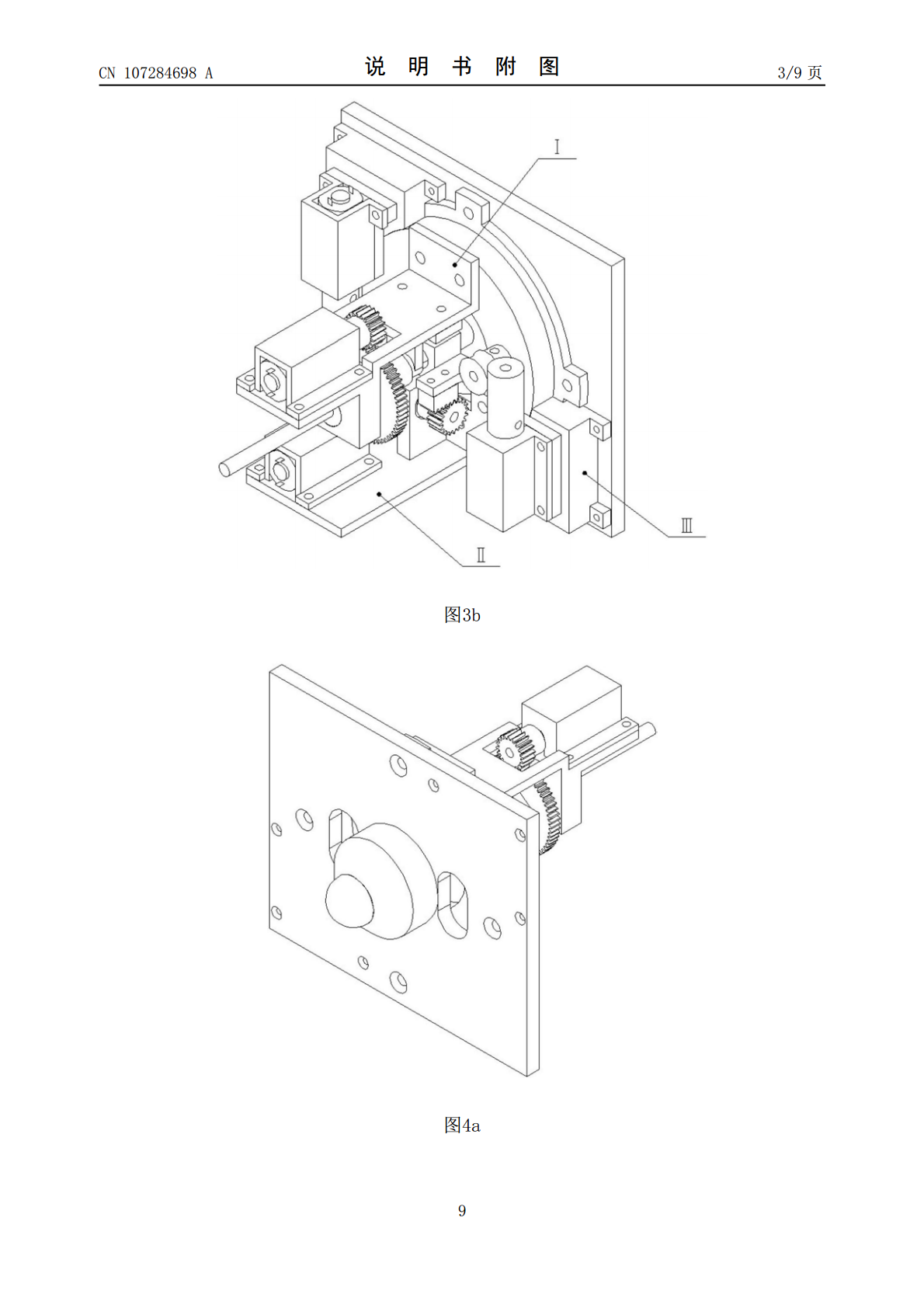
本发明涉及一种锥—杆式对接机构,包括主动对接模块及被动对接模块。所述被动对接模块通过复位弹簧完成锁舌的自锁动作。所述主动对接模块又包括对接模块、解锁模块及锁定模块,三个模块共计四个个体沿对接轴线周向布置,满足对接模块和解锁模块分别固定于上下两侧且两个锁定模块分别固定于左右两侧,同时梯形丝杠、解锁盘伸缩杆和滑动直线导轨为空套结构。整个对接机构利用了高副接触的低摩擦特性及弹簧的复位作用,达到了快速对接及快速解锁的目的,并使用梯形丝杠、蜗轮蜗杆、齿轮齿条作为主要传动部件,因此,在保留了锥—杆式对接机构所有功能的
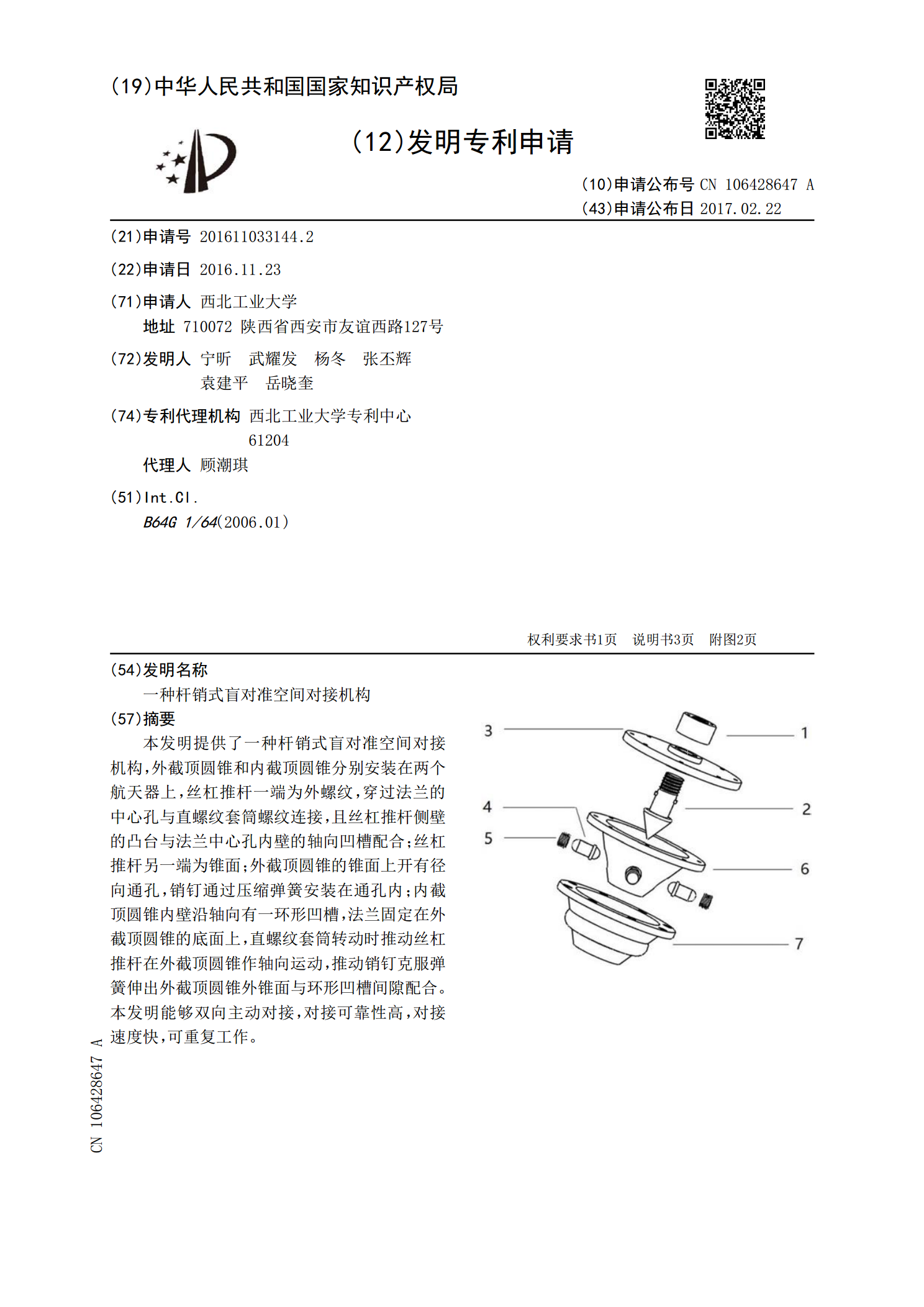
一种杆销式盲对准空间对接机构.pdf
本发明提供了一种杆销式盲对准空间对接机构,外截顶圆锥和内截顶圆锥分别安装在两个航天器上,丝杠推杆一端为外螺纹,穿过法兰的中心孔与直螺纹套筒螺纹连接,且丝杠推杆侧壁的凸台与法兰中心孔内壁的轴向凹槽配合;丝杠推杆另一端为锥面;外截顶圆锥的锥面上开有径向通孔,销钉通过压缩弹簧安装在通孔内;内截顶圆锥内壁沿轴向有一环形凹槽,法兰固定在外截顶圆锥的底面上,直螺纹套筒转动时推动丝杠推杆在外截顶圆锥作轴向运动,推动销钉克服弹簧伸出外截顶圆锥外锥面与环形凹槽间隙配合。本发明能够双向主动对接,对接可靠性高,对接速度快,可重

一种升降对接式晾衣杆结构.pdf
本发明公开了一种升降对接式晾衣杆结构,包括上下升降的矩形晾框和水平移动的U形晾框,所述矩形晾框的上方设置有升降绳和升降电机,所述U形晾框的外侧设置有电动推杆;矩形晾框和U形晾框的内腔横截面一致,矩形晾框的腔内设置有齿带、传送电机和衣钩组件,U形晾框的内腔设置有所述齿带、导向柱轮和所述衣钩组件;其优点在于:1能实现矩形晾框的升降,使得不同身高的使用者都能便利的把衣架挂入挂钩环;2齿带由若干条齿带单元组成,齿带单元的一端为凸条,另一端为凹槽,实现了竖直向的对接与脱卸;也能实现水平向的对接与脱卸,构思巧炒。
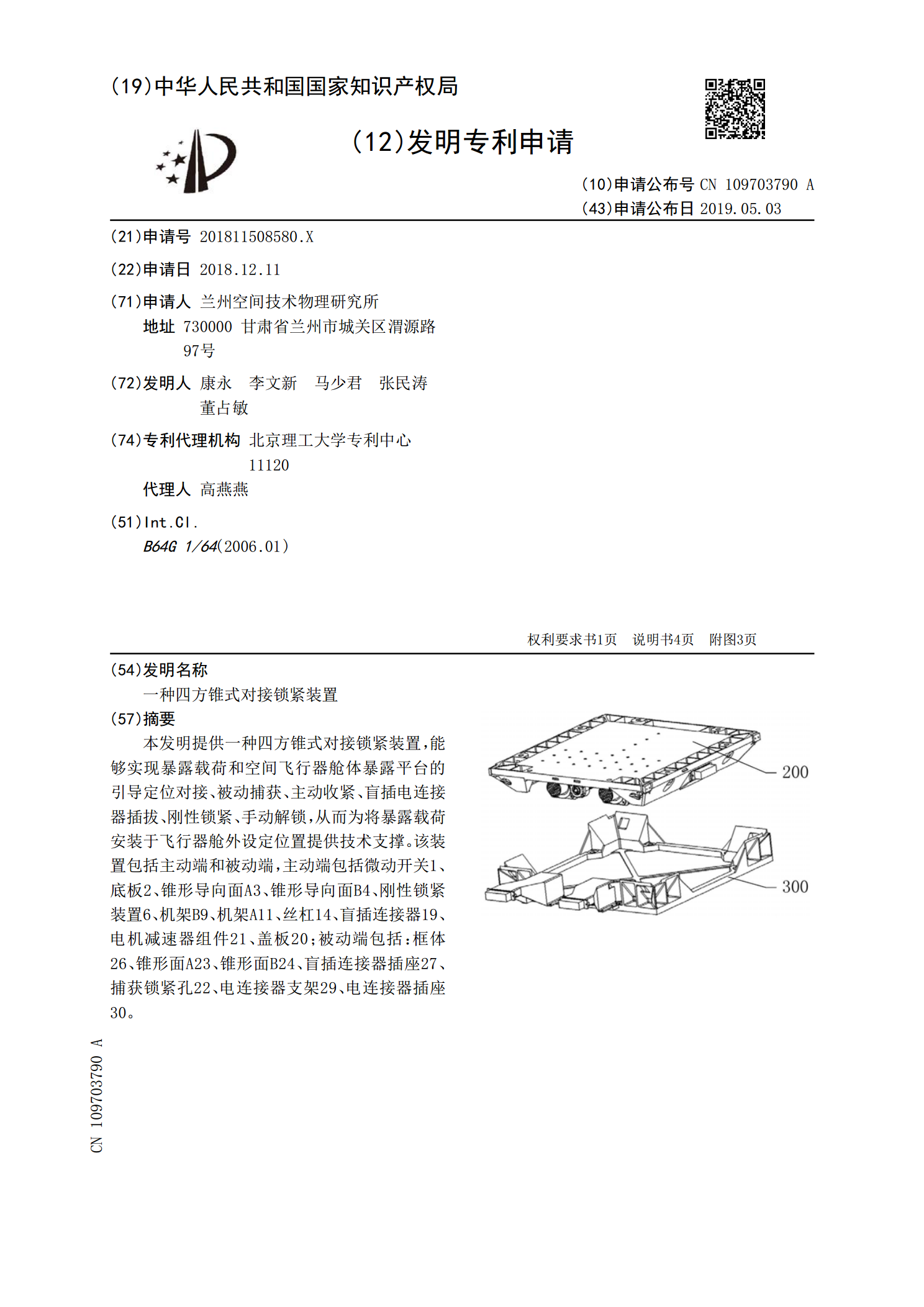
一种四方锥式对接锁紧装置.pdf
本发明提供一种四方锥式对接锁紧装置,能够实现暴露载荷和空间飞行器舱体暴露平台的引导定位对接、被动捕获、主动收紧、盲插电连接器插拔、刚性锁紧、手动解锁,从而为将暴露载荷安装于飞行器舱外设定位置提供技术支撑。该装置包括主动端和被动端,主动端包括微动开关1、底板2、锥形导向面A3、锥形导向面B4、刚性锁紧装置6、机架B9、机架A11、丝杠14、盲插连接器19、电机减速器组件21、盖板20;被动端包括:框体26、锥形面A23、锥形面B24、盲插连接器插座27、捕获锁紧孔22、电连接器支架29、电连接器插座30。

一种长锥滚锥式无级变速传动机构.pdf
本发明公开了一种长锥滚锥式无级变速传动机构,包括第一长锥滚轮、第二长锥滚轮和中间滚锥轮,中间滚锥轮上设有第一锥面和第二锥面,第一锥面与第一长锥滚轮接触传动、第二锥面与第二长锥滚轮接触传动;通过调节中间滚锥轮在两个长锥滚轮上的接触位置,可连续改变两个长锥滚轮的工作半径,实现无级变速传动。本发明在最佳传动时的几何滑动=0,有效降低了锥轮式长锥滚锥式无级变速传动机构中的几何滑动,并提高了传动效率和功率。本发明可用于各种车辆、船舶和机械传动等领域。