
一种四方锥式对接锁紧装置.pdf

志信****pp


1/9
2/9
3/9
4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种四方锥式对接锁紧装置.pdf
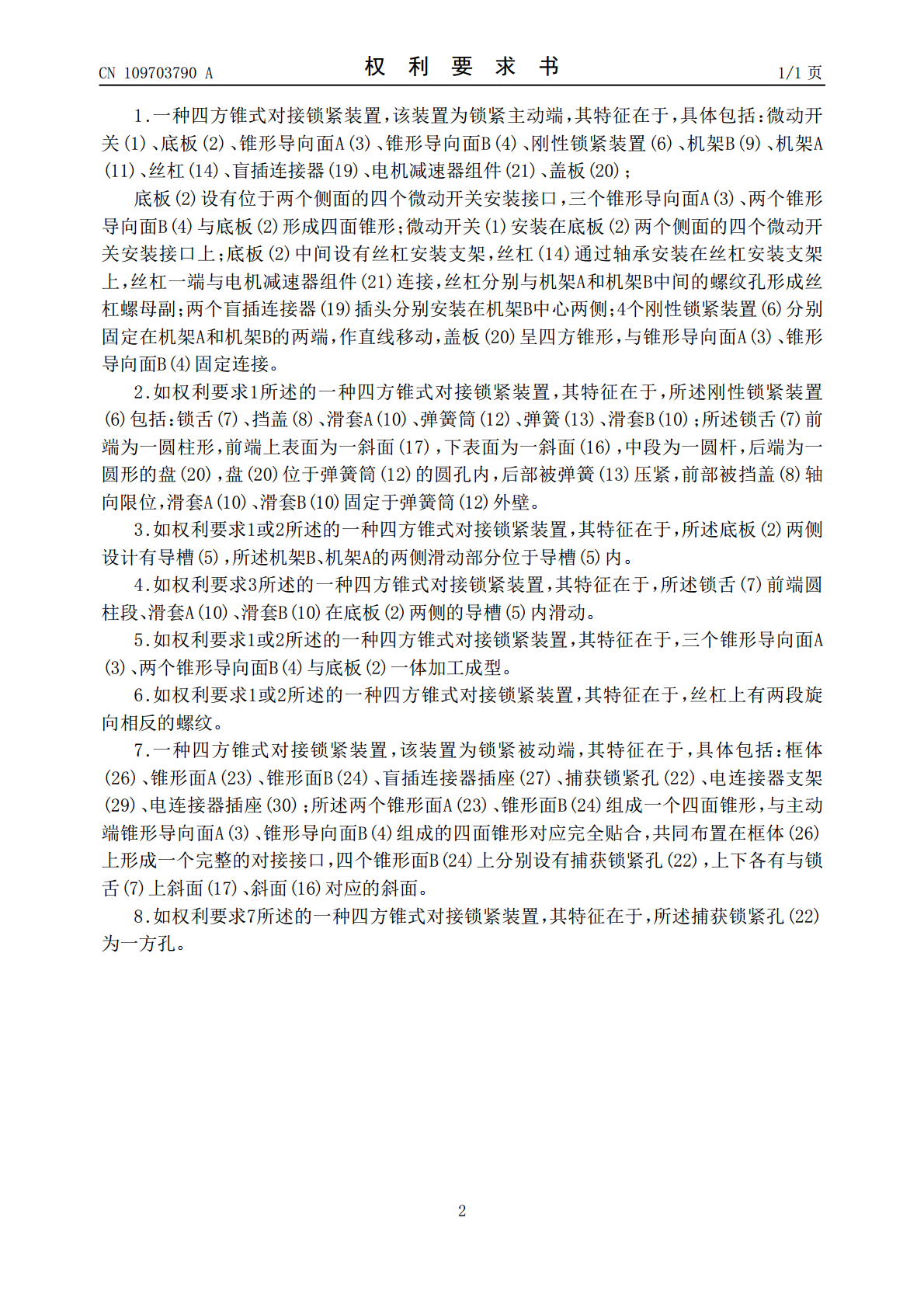
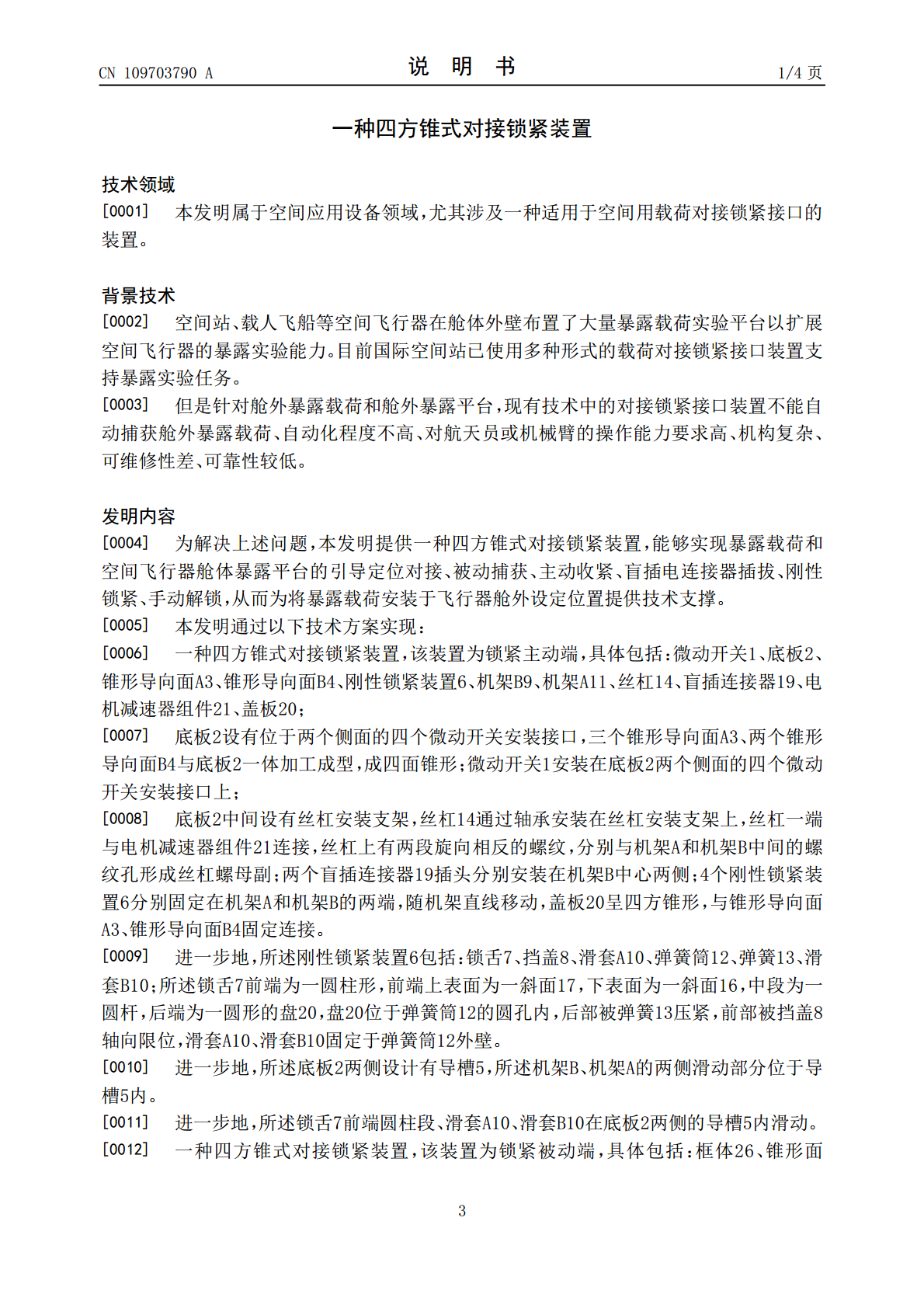
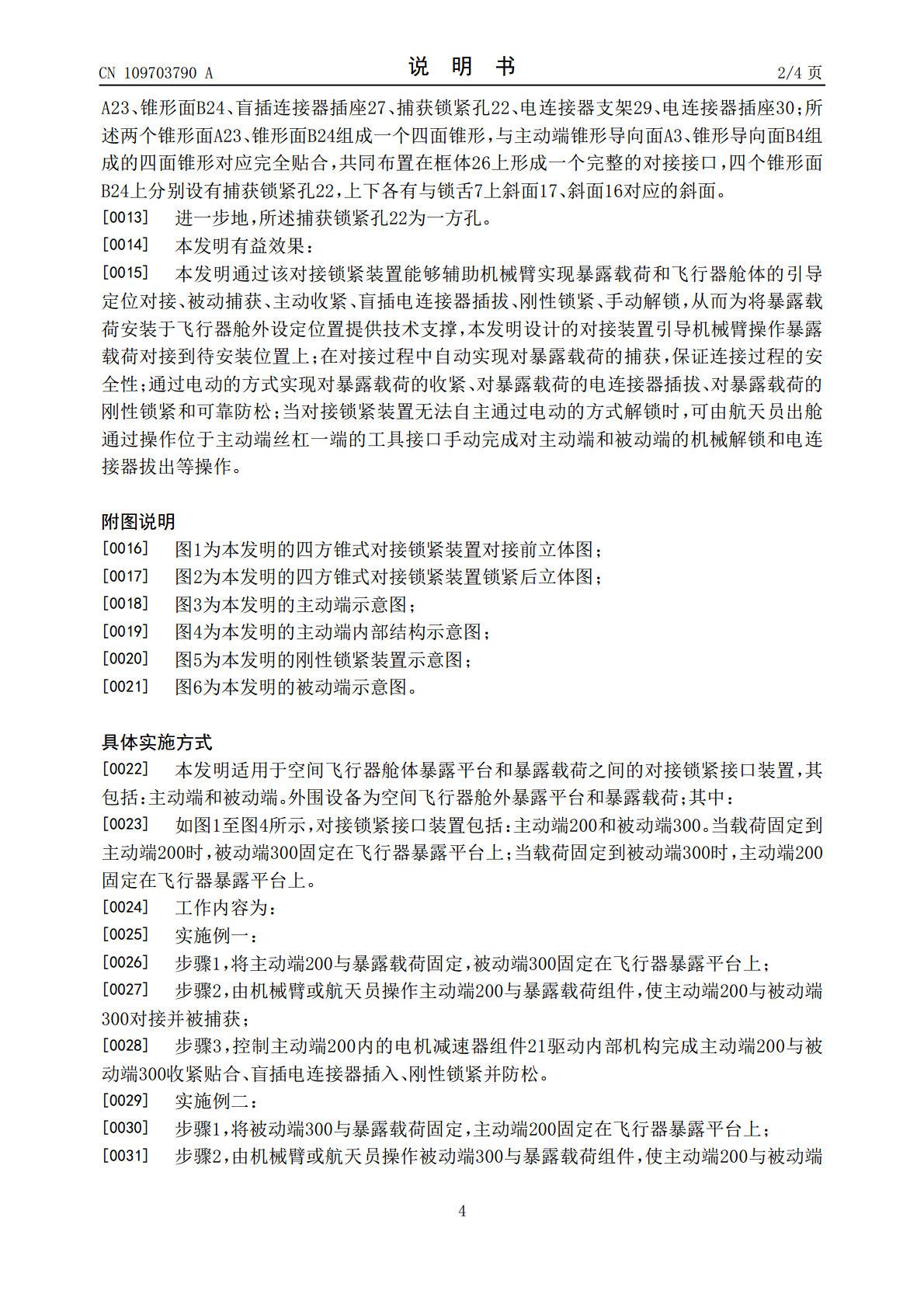
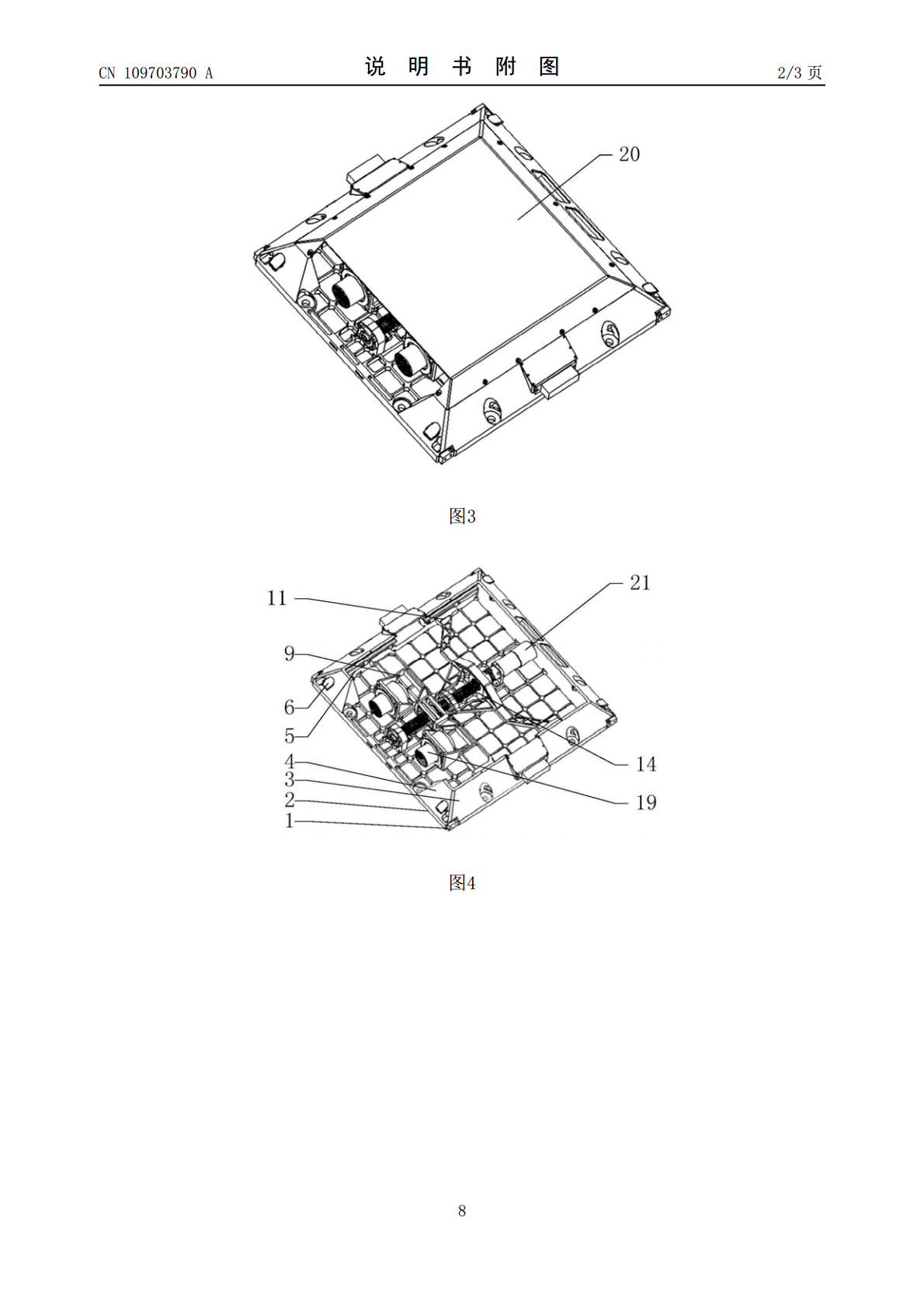
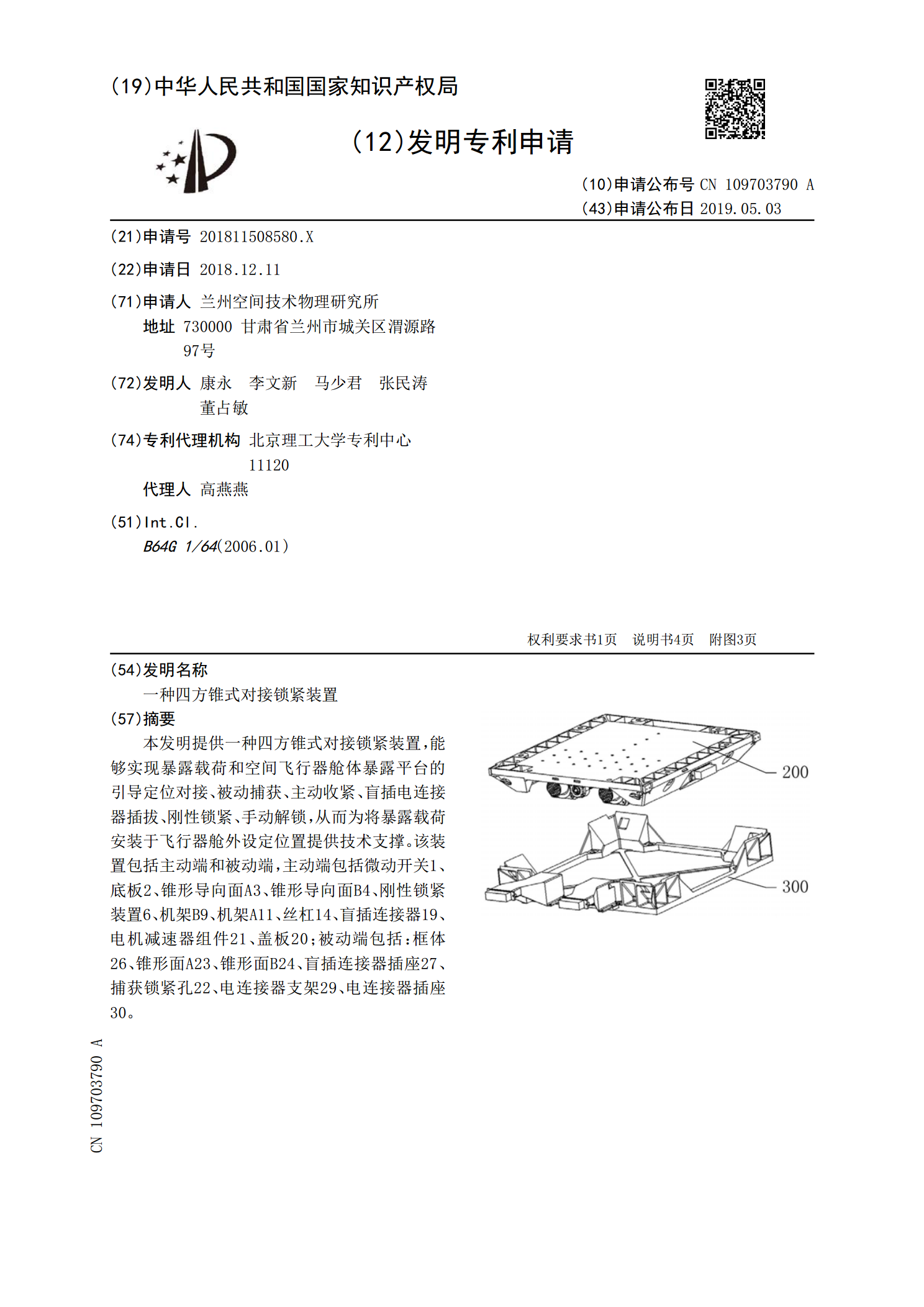
本发明提供一种四方锥式对接锁紧装置,能够实现暴露载荷和空间飞行器舱体暴露平台的引导定位对接、被动捕获、主动收紧、盲插电连接器插拔、刚性锁紧、手动解锁,从而为将暴露载荷安装于飞行器舱外设定位置提供技术支撑。该装置包括主动端和被动端,主动端包括微动开关1、底板2、锥形导向面A3、锥形导向面B4、刚性锁紧装置6、机架B9、机架A11、丝杠14、盲插连接器19、电机减速器组件21、盖板20;被动端包括:框体26、锥形面A23、锥形面B24、盲插连接器插座27、捕获锁紧孔22、电连接器支架29、电连接器插座30。
联动式空间对接锁紧与分离装置及方法.pdf
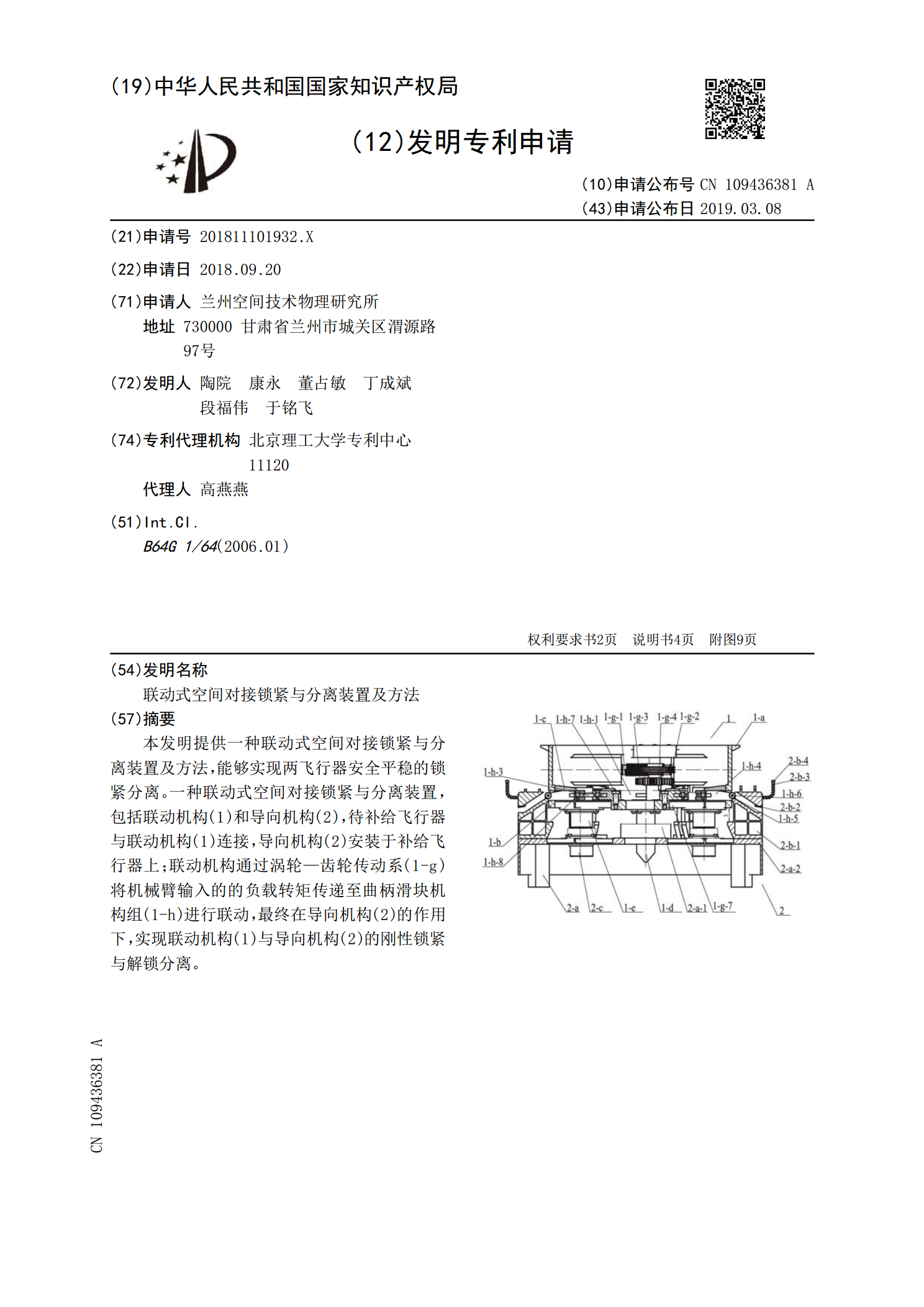
本发明提供一种联动式空间对接锁紧与分离装置及方法,能够实现两飞行器安全平稳的锁紧分离。一种联动式空间对接锁紧与分离装置,包括联动机构(1)和导向机构(2),待补给飞行器与联动机构(1)连接,导向机构(2)安装于补给飞行器上;联动机构通过涡轮—齿轮传动系(1‑g)将机械臂输入的的负载转矩传递至曲柄滑块机构组(1‑h)进行联动,最终在导向机构(2)的作用下,实现联动机构(1)与导向机构(2)的刚性锁紧与解锁分离。
一种航天器“连杆——卡爪”式对接锁紧装置.pdf
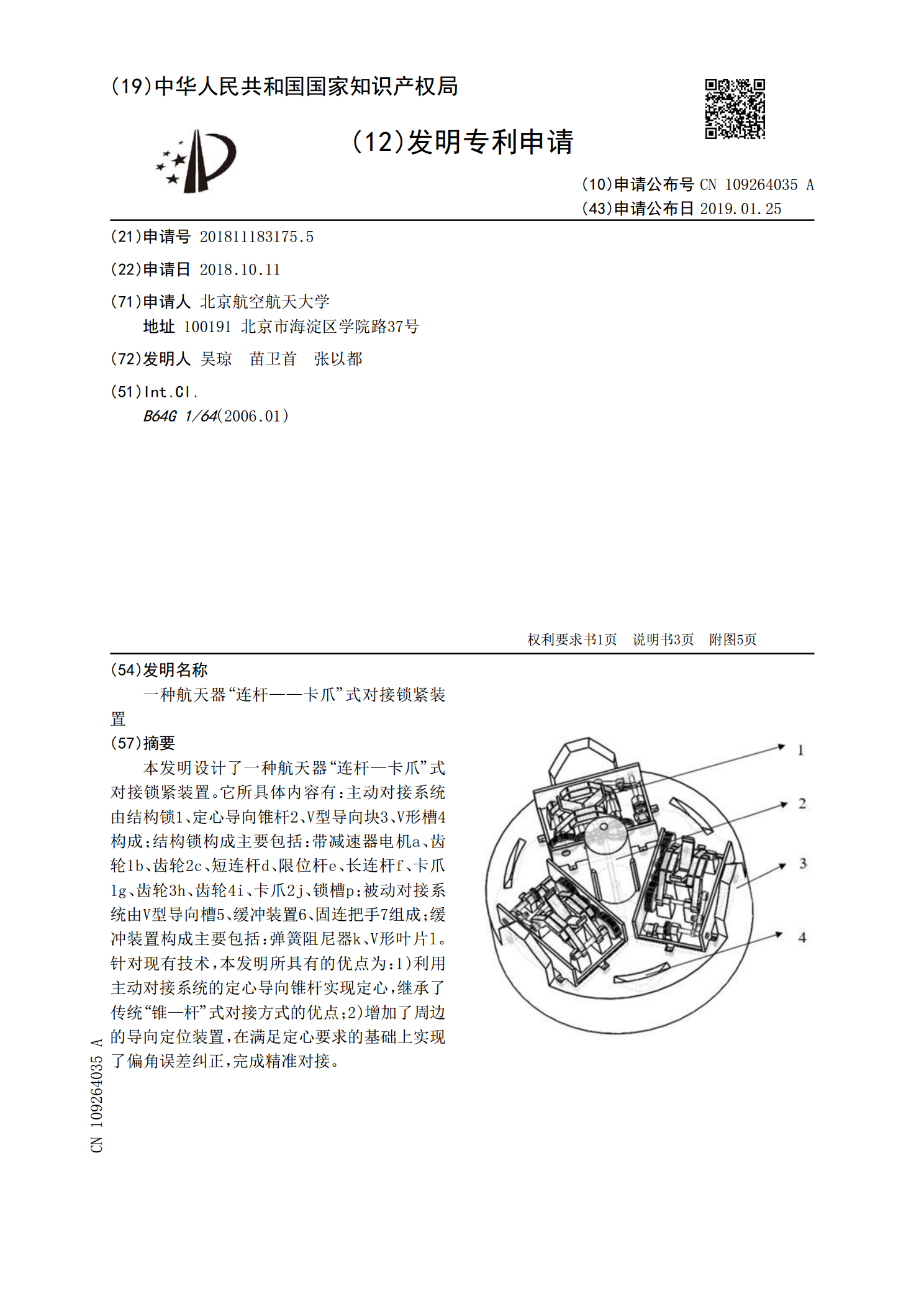
本发明设计了一种航天器“连杆—卡爪”式对接锁紧装置。它所具体内容有:主动对接系统由结构锁1、定心导向锥杆2、V型导向块3、V形槽4构成;结构锁构成主要包括:带减速器电机a、齿轮1b、齿轮2c、短连杆d、限位杆e、长连杆f、卡爪1g、齿轮3h、齿轮4i、卡爪2j、锁槽p;被动对接系统由V型导向槽5、缓冲装置6、固连把手7组成;缓冲装置构成主要包括:弹簧阻尼器k、V形叶片l。针对现有技术,本发明所具有的优点为:1)利用主动对接系统的定心导向锥杆实现定心,继承了传统“锥—杆”式对接方式的优点;2)增加了周边的导

一种空间用小型对接锁紧装置.pdf
本发明的空间用小型对接锁紧装置,其包括:安装在空间站上主动机构和安装在空间试验载荷上的壳体;主动机构包括:框体、定位销安装板A、粗定位销A、精定位销A、面检测开关A、加热装置、电机、温度传感器、减速机、定位销安装板B、减速机支架、粗定位销B、面检测开关B、精定位销B、电位计、联轴器、电位计支架、小齿轮、滑动导套、光轴、大齿轮、丝杠、精定位销C、面检测开关C、定位销安装板C、锁紧检测开关、驱动机架、解锁检测开关、开关安装板、面检测开关D、锁紧销A、锁紧销B、浮动连接器插座、螺母。本发明设计了小型化、轻量化、
一种锥—杆式对接机构.pdf
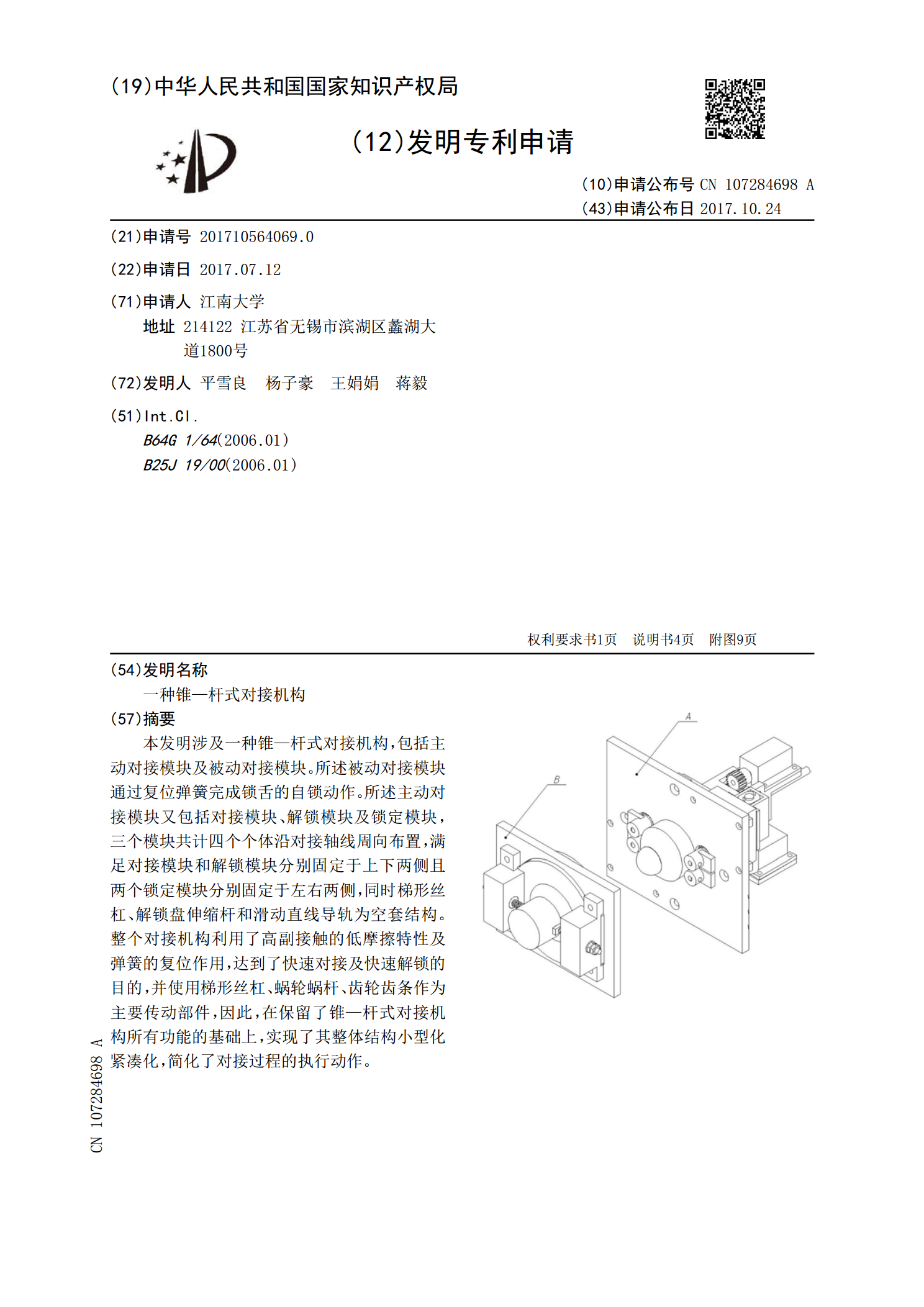
本发明涉及一种锥—杆式对接机构,包括主动对接模块及被动对接模块。所述被动对接模块通过复位弹簧完成锁舌的自锁动作。所述主动对接模块又包括对接模块、解锁模块及锁定模块,三个模块共计四个个体沿对接轴线周向布置,满足对接模块和解锁模块分别固定于上下两侧且两个锁定模块分别固定于左右两侧,同时梯形丝杠、解锁盘伸缩杆和滑动直线导轨为空套结构。整个对接机构利用了高副接触的低摩擦特性及弹簧的复位作用,达到了快速对接及快速解锁的目的,并使用梯形丝杠、蜗轮蜗杆、齿轮齿条作为主要传动部件,因此,在保留了锥—杆式对接机构所有功能的