
一种陆空两用旋翼飞行器的控制方法.pdf

增梅****主啊


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种陆空两用旋翼飞行器的控制方法.pdf
本发明公开了一种陆空两用旋翼飞行器的控制方法。空中侦查无人机无法详细了解底面情况,地面侦查机器人的机动性和规避障碍物的能力较差。本发明采用的陆空两用旋翼飞行器,包括载体板和旋翼变形臂。旋翼变形臂包括第一变形块、第二变形块、第三变形块、第四变形块、电机底座、两用轮翼、第一驱动件、第二驱动件、第三驱动件、第四驱动件、轮翼电机、控制器、摄像头和陀螺仪。两块载体板上下平行设置,且均呈矩形状。旋翼变形臂共有四根;四根旋翼变形臂的第一变形块顶面与位于上部载体板底面的四个角分别固定。本发明能够控制所用陆空两用旋翼飞行器
陆空两用旋翼飞行器.pdf
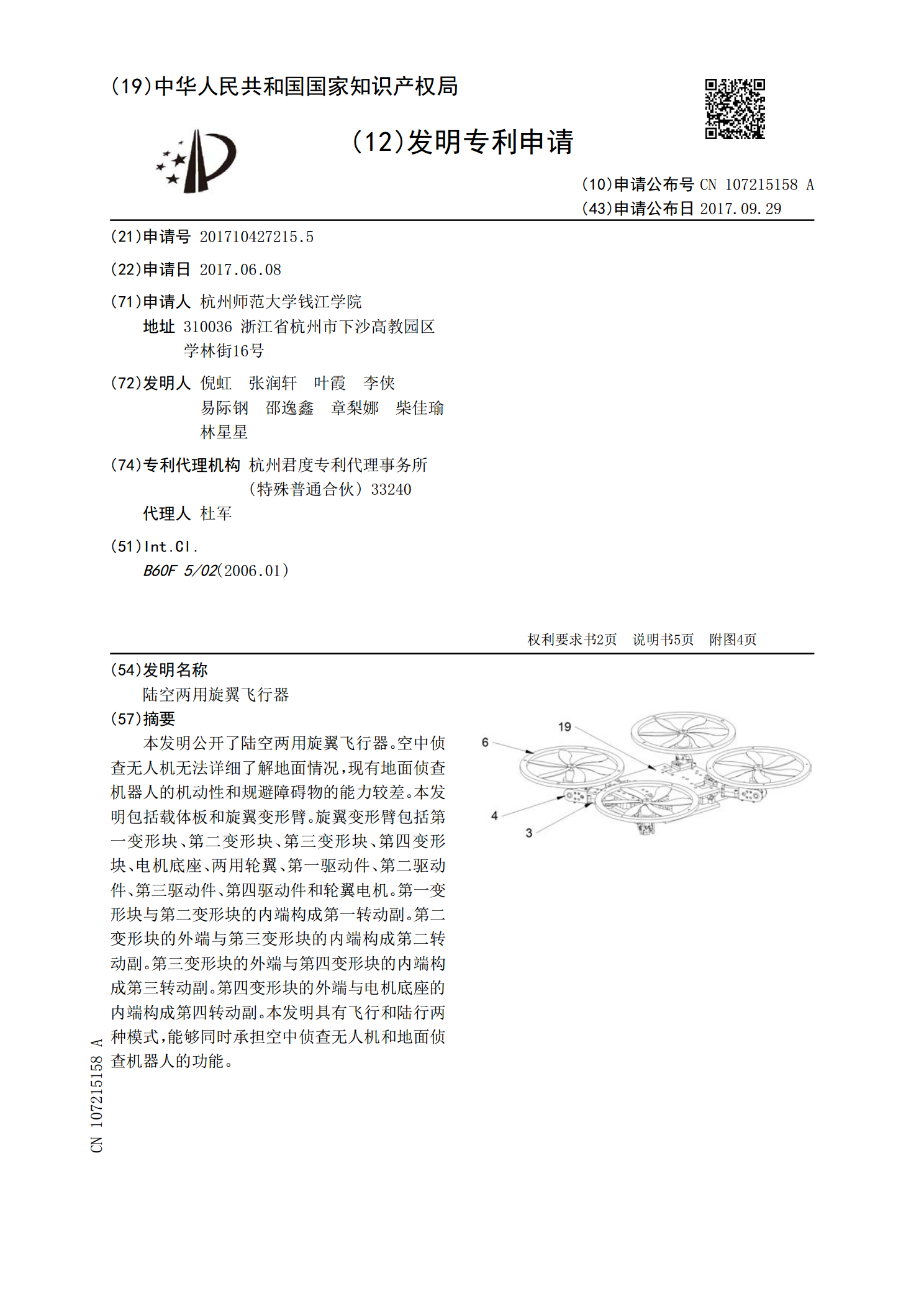
本发明公开了陆空两用旋翼飞行器。空中侦查无人机无法详细了解地面情况,现有地面侦查机器人的机动性和规避障碍物的能力较差。本发明包括载体板和旋翼变形臂。旋翼变形臂包括第一变形块、第二变形块、第三变形块、第四变形块、电机底座、两用轮翼、第一驱动件、第二驱动件、第三驱动件、第四驱动件和轮翼电机。第一变形块与第二变形块的内端构成第一转动副。第二变形块的外端与第三变形块的内端构成第二转动副。第三变形块的外端与第四变形块的内端构成第三转动副。第四变形块的外端与电机底座的内端构成第四转动副。本发明具有飞行和陆行两种模式,
陆空两用四旋翼飞行器.pdf
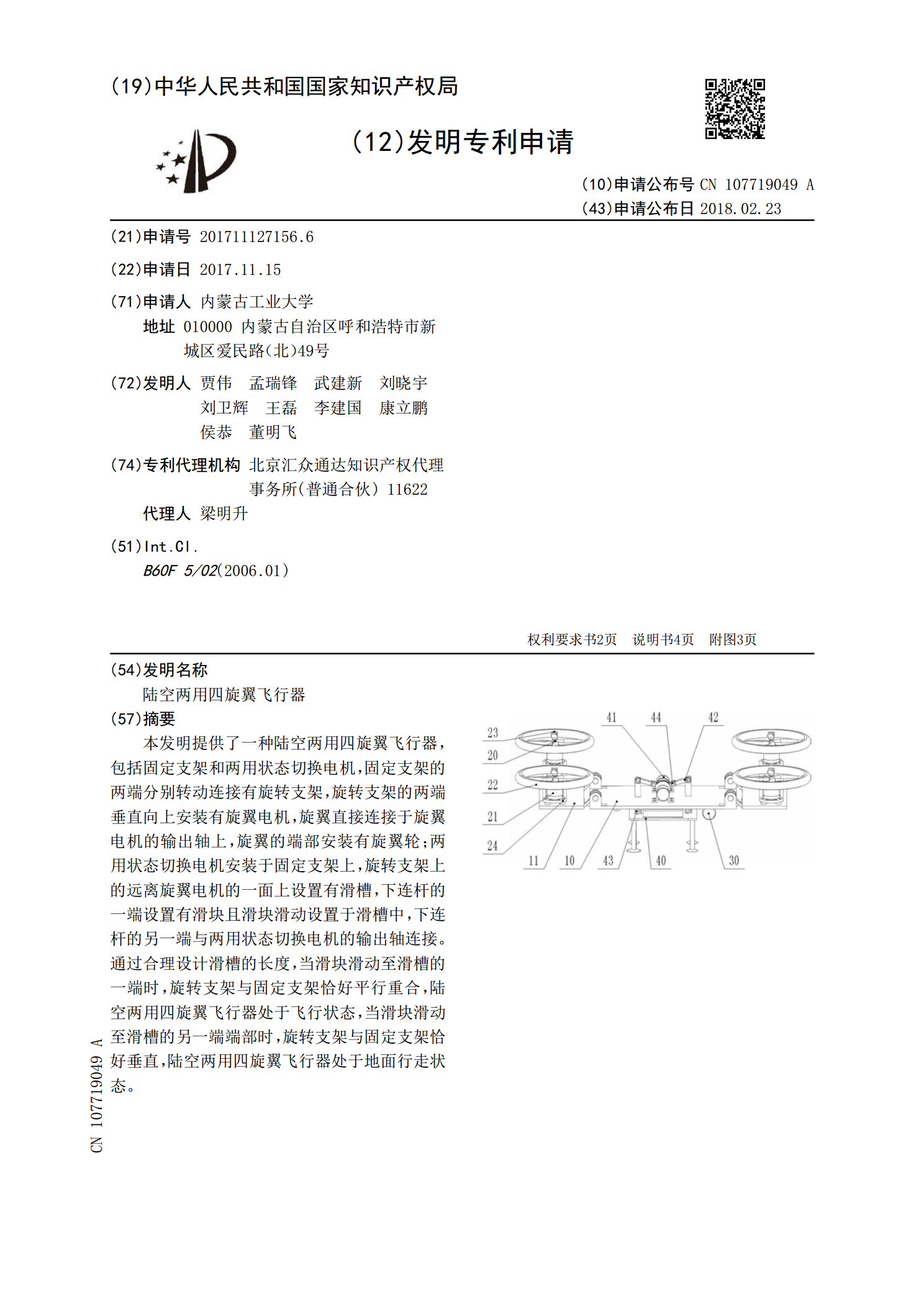
本发明提供了一种陆空两用四旋翼飞行器,包括固定支架和两用状态切换电机,固定支架的两端分别转动连接有旋转支架,旋转支架的两端垂直向上安装有旋翼电机,旋翼直接连接于旋翼电机的输出轴上,旋翼的端部安装有旋翼轮;两用状态切换电机安装于固定支架上,旋转支架上的远离旋翼电机的一面上设置有滑槽,下连杆的一端设置有滑块且滑块滑动设置于滑槽中,下连杆的另一端与两用状态切换电机的输出轴连接。通过合理设计滑槽的长度,当滑块滑动至滑槽的一端时,旋转支架与固定支架恰好平行重合,陆空两用四旋翼飞行器处于飞行状态,当滑块滑动至滑槽的另

一种陆空两用四旋翼飞行器.pdf
本发明公开了一种陆空两用四旋翼飞行器,包括机身,控制器,机臂,支架,旋翼和驱动电机,机臂连接机身,支架连接机臂且朝下设置,驱动电机设置于相应机臂的外端,旋翼连接相应驱动电机的转轴,驱动电机与控制器电联接,还包括万向轮和转向电机,万向轮安装于相应支架上,转向电机安装于相应机臂上,驱动电机与相应转向电机的转轴连接,转向电机与控制器电联接,转向电机能够驱动驱动电机由竖直于机臂转变为平行于机臂。本发明具有的有益效果:能够实现空中飞行和陆地滑行。

陆空两用六旋翼飞行器装置.pdf
本发明公开了一种陆空两用六旋翼飞行器装置,其包括六旋翼飞行器飞行装置和梯形履带行走机构;所述六旋翼飞行器飞行装置包括旋桨无刷电机等,所述旋桨无刷电机的输出轴与一个螺旋桨固定连接并放置于六旋翼飞行器的六个轴端电机座中;所述无刷控制面板放置于飞行器机架的中心位置,并通过六个水滴状锁紧扣的旋转将无刷控制面板固定住;所述六旋翼飞行器梯形履带行走机构包括梯形支架等,梯形支架通过一个圆柱状连接杆与飞行器机架底端配合连接;所述履带轮通过轴固定在梯形支架的各个端点位置的轮槽中;所述履带与一个履带轮配合形成陆地行走装置;本