
一种可实现轮、履替换的变形机器人.pdf

是你****盟主

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可实现轮、履替换的变形机器人.pdf
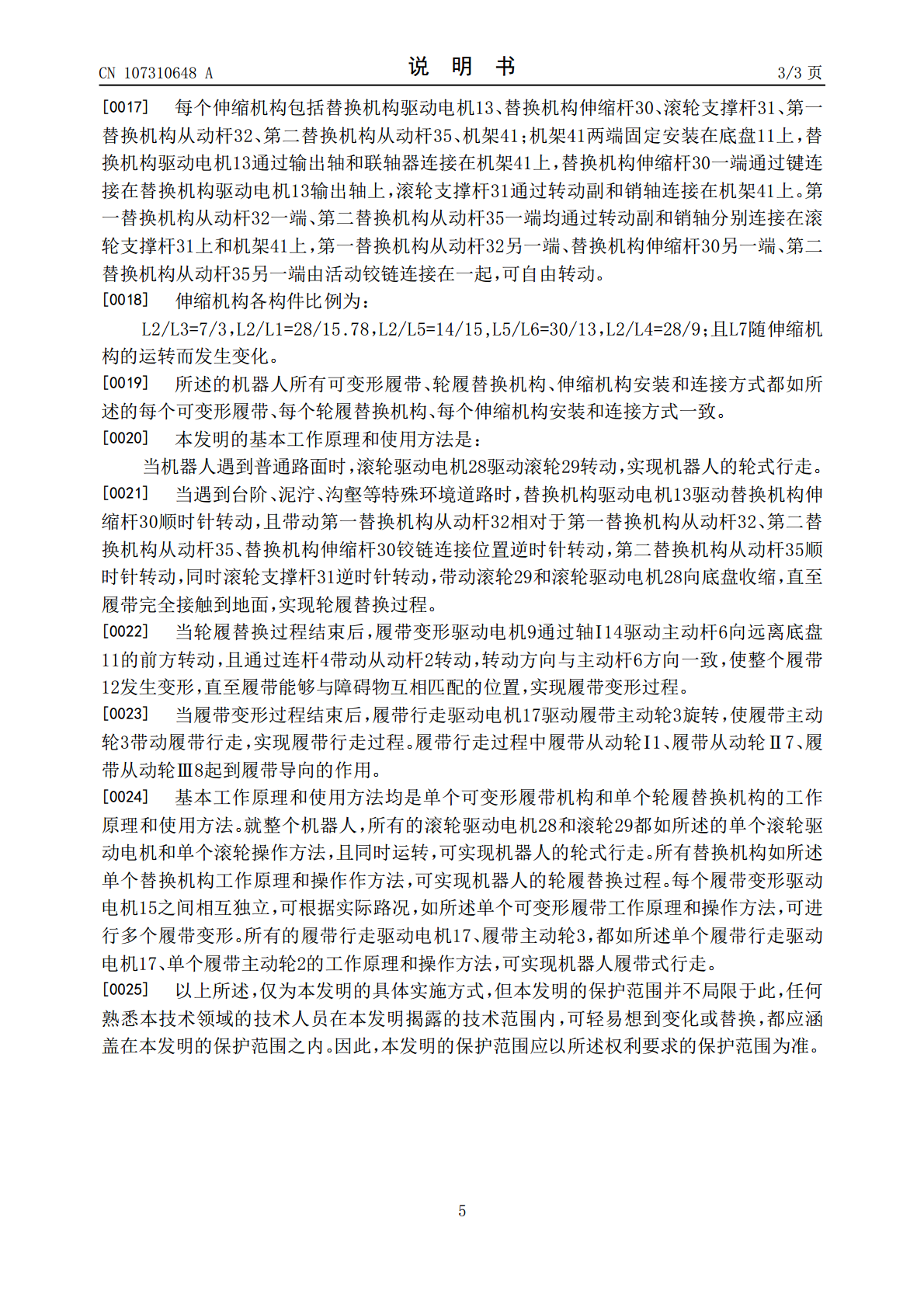
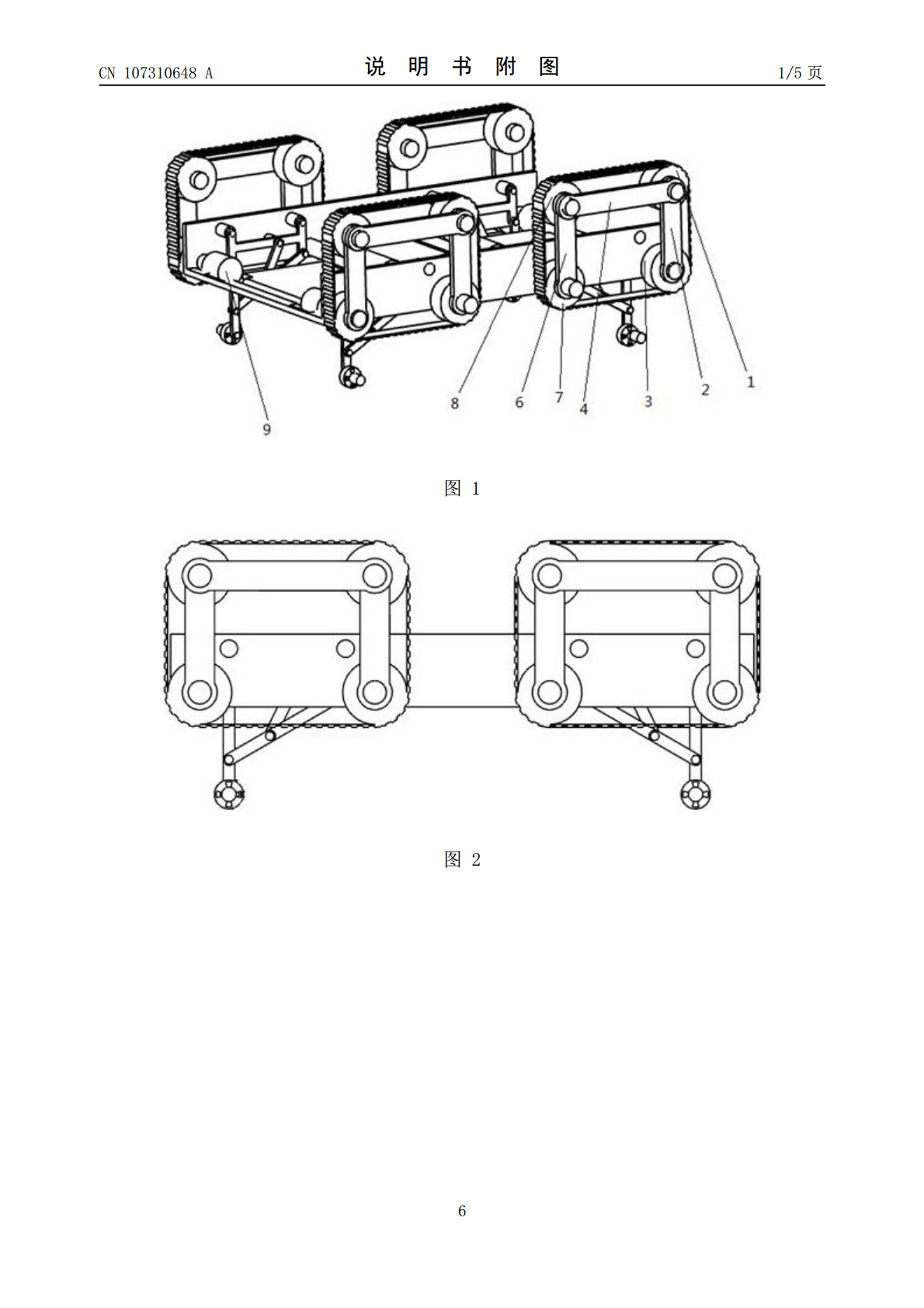
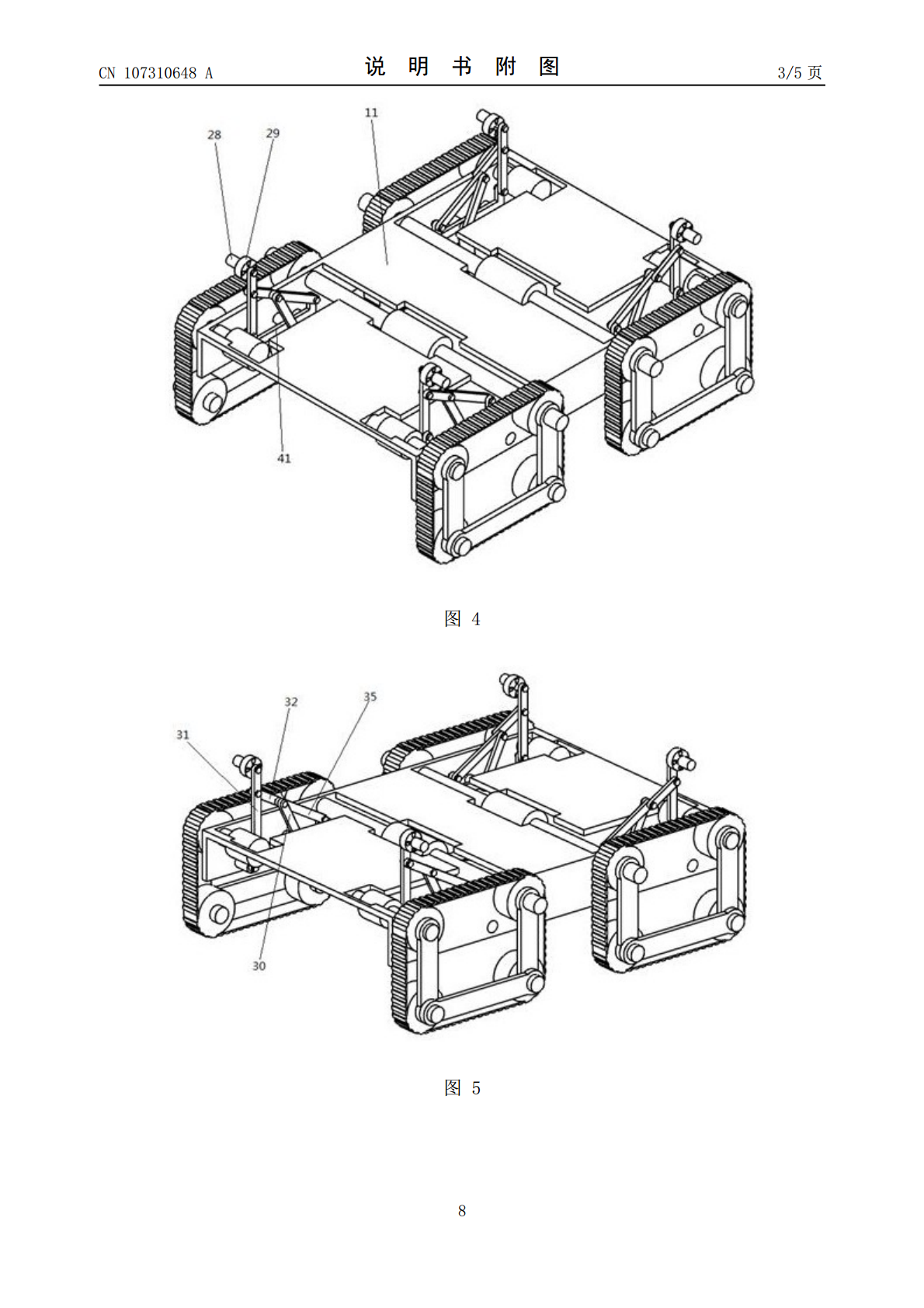
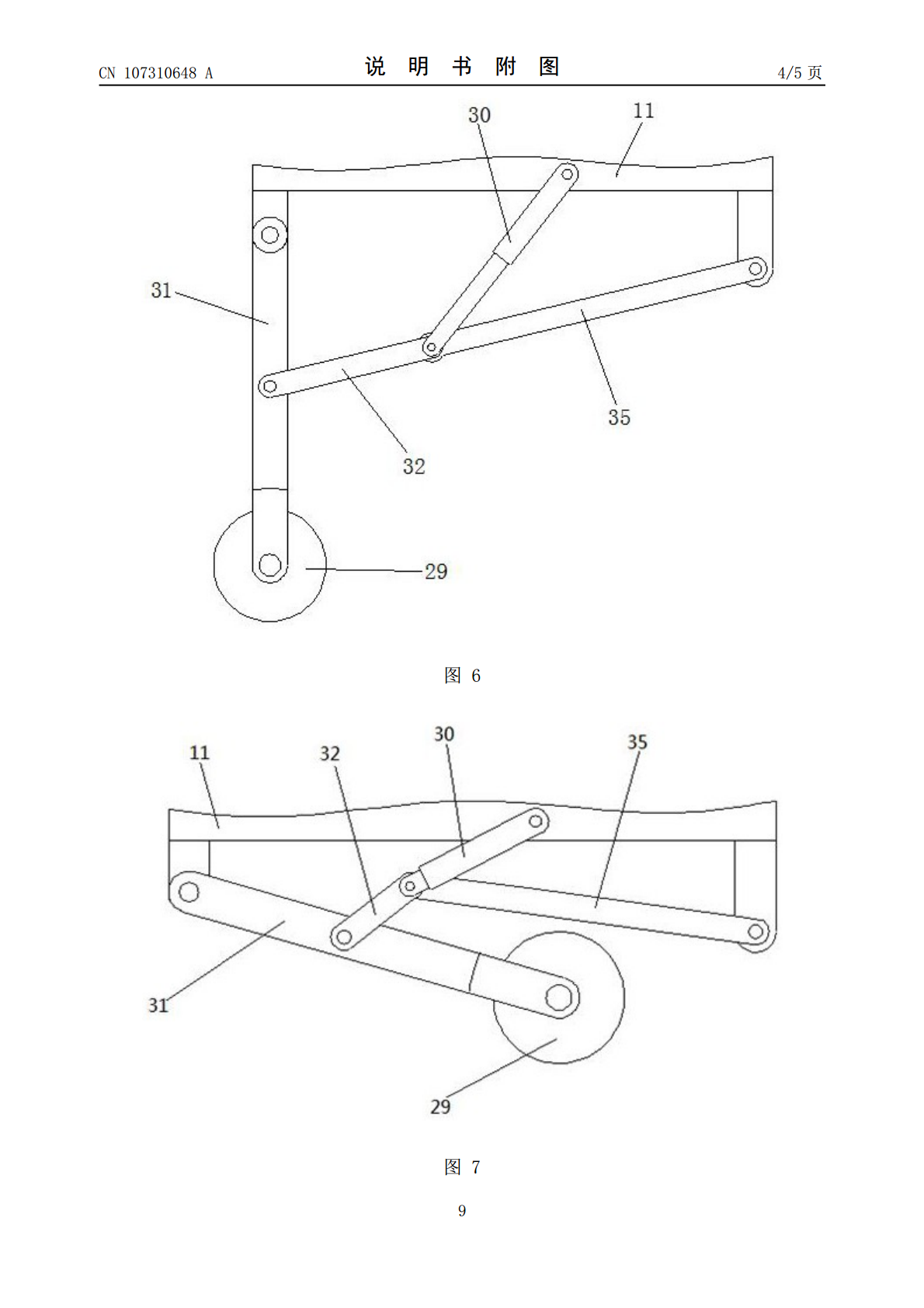
本发明公开了一种可实现轮、履替换的变形机器人,包括:底盘、可变形履带机构和轮履替换机构,所述底盘连接至少三个可变形履带机构和至少三个轮履替换机构支撑底盘,所述轮履替换机构包括:伸缩机构、滚轮和滚轮驱动电机,所述伸缩机构连接滚轮支撑,所述滚轮由滚轮驱动电机驱动转动;当行走普通道路时,所述伸缩机构伸出;当遇到台阶、泥泞、沟壑等特殊环境道路时,所述伸缩机构收缩。对称的可变形履带机构和轮履替换结构,能够提高机器人总体结构的稳定性;多个可变形履带之间相互独立能够提升机器人在复杂环境下的自适应能力,越障能力;机器人整

一种轮履替换变形机器人.pdf
本发明涉及一种轮履替换变形机器人,属于专用机器人技术领域。本发明包括履带变形行走机构、轮式行走机构、轮履替换机构、底架;履带变形行走机构、轮履替换机构均安装在底架,轮式行走机构安装在轮履替换机构上。本发明该机器人轮履替换和变形功能能够提高机器人越障能力,且越障的灵活性高;能够提升机器人在恶劣地形环境下的生存能力;能使机器人有多种运动模式,可适应各种复杂地形环境;履带式运动机构和轮式运动机构相互独立,增加机器人的运动模式,且能够提高机器人的可重组能力;结构简单、轻巧,便于制造,使用方便。

一种轮履式可重构变形轮.pdf
本发明公开一种轮履式可重构变形轮,包括固定装置、轮履形态变形装置和履带行进装置;固定装置包括变形轮支撑架和U型支撑架;变形轮支撑架为变形轮的受力主体;U型支撑架安装在变形轮支撑架上并位于变形轮内部;轮履形态变形装置包括变形传动机构和变形连杆结构,变形传动机构用于驱动变形连杆结构可相对于变形轮支撑架伸出或缩回;履带行走装置的传动部分安装在变形轮支撑架上,弹性履带包覆于变形轮的外部轮廓并与变形连杆结构相接触。该轮履式可重构变形轮,具有自由切换两种形态能力和高承载能力,并且实施方式简单,可靠性高,在较多领域应用
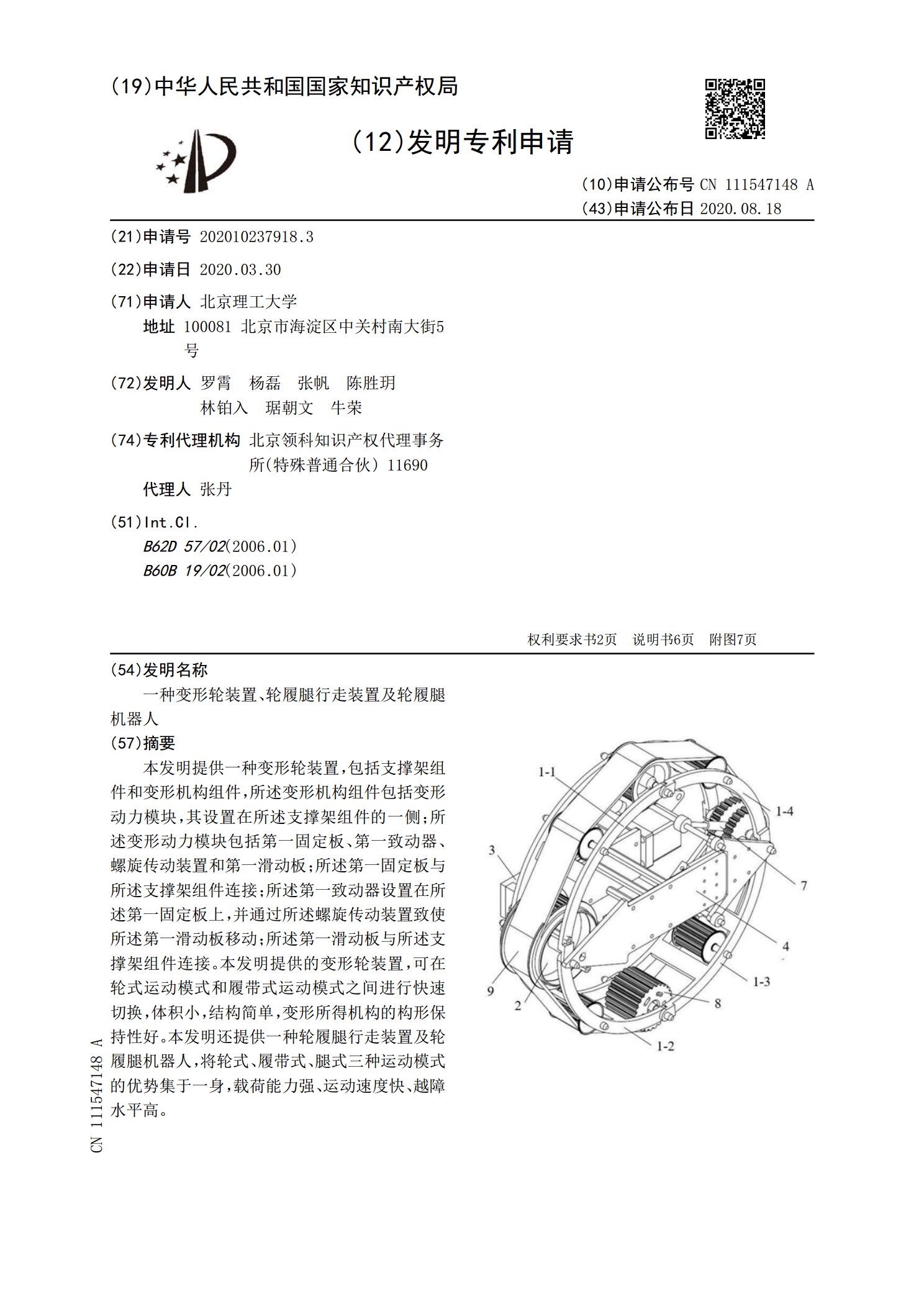
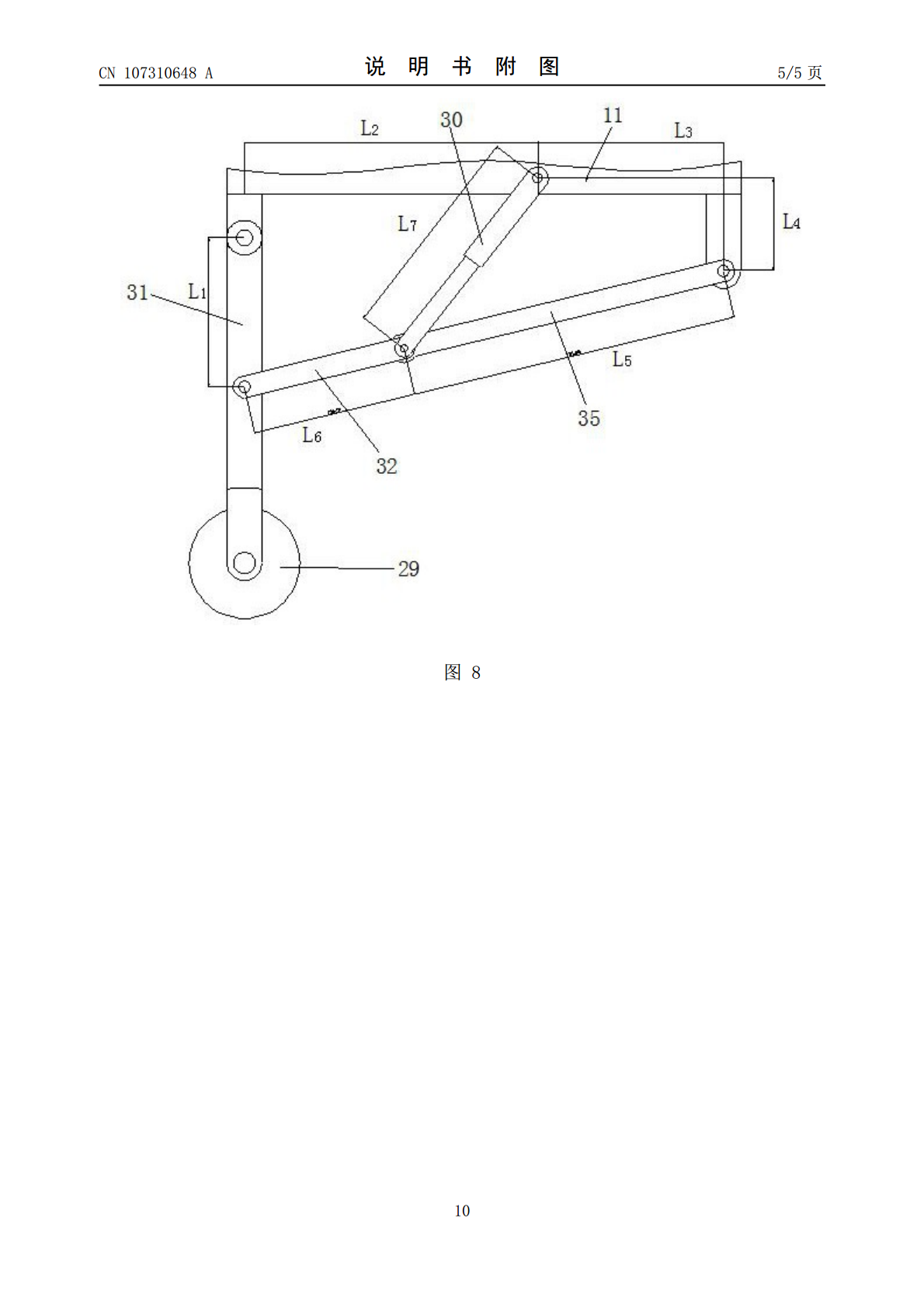
一种变形轮装置、轮履腿行走装置及轮履腿机器人.pdf
本发明提供一种变形轮装置,包括支撑架组件和变形机构组件,所述变形机构组件包括变形动力模块,其设置在所述支撑架组件的一侧;所述变形动力模块包括第一固定板、第一致动器、螺旋传动装置和第一滑动板;所述第一固定板与所述支撑架组件连接;所述第一致动器设置在所述第一固定板上,并通过所述螺旋传动装置致使所述第一滑动板移动;所述第一滑动板与所述支撑架组件连接。本发明提供的变形轮装置,可在轮式运动模式和履带式运动模式之间进行快速切换,体积小,结构简单,变形所得机构的构形保持性好。本发明还提供一种轮履腿行走装置及轮履腿机器人
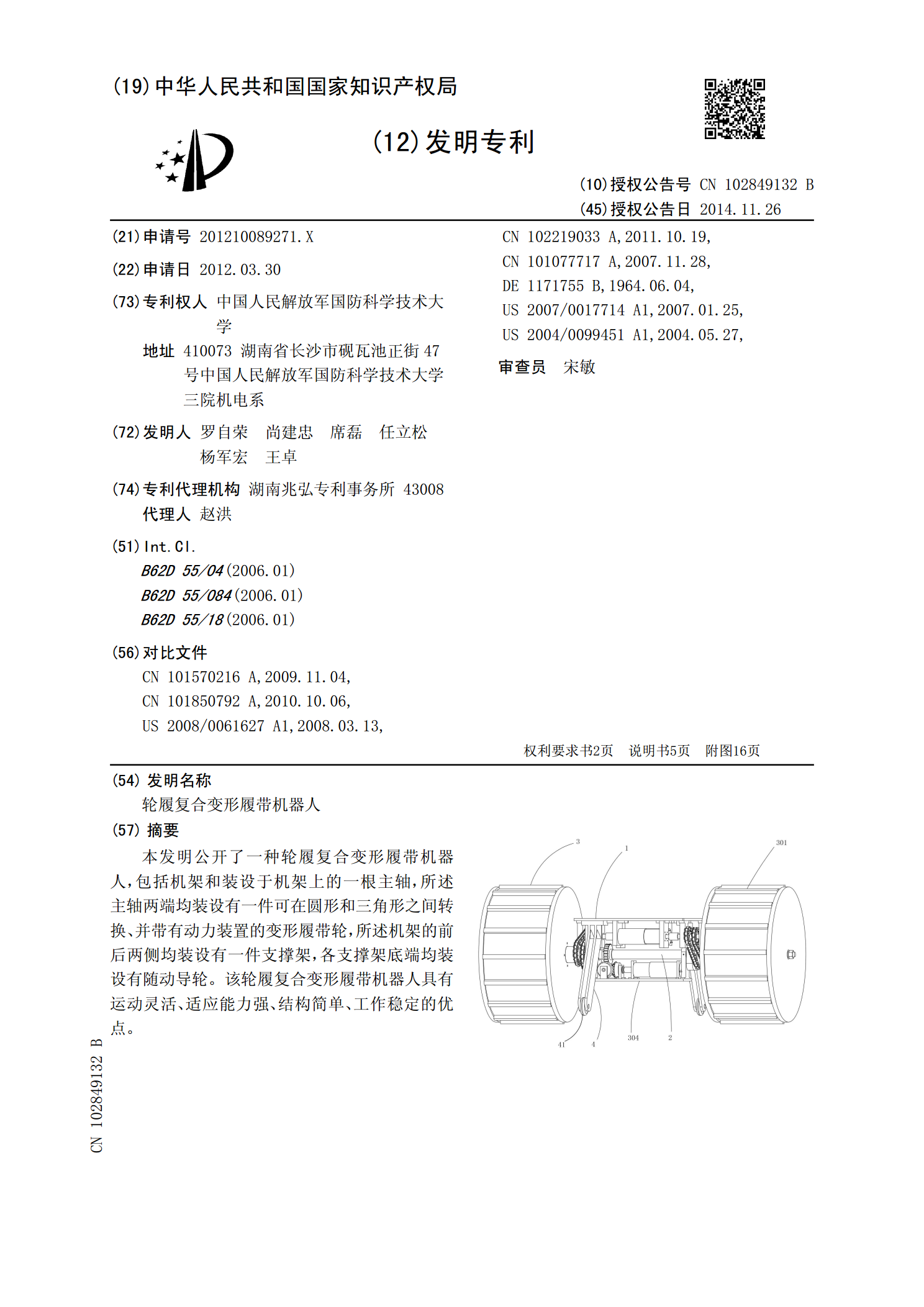
轮履复合变形履带机器人.pdf
本发明公开了一种轮履复合变形履带机器人,包括机架和装设于机架上的一根主轴,所述主轴两端均装设有一件可在圆形和三角形之间转换、并带有动力装置的变形履带轮,所述机架的前后两侧均装设有一件支撑架,各支撑架底端均装设有随动导轮。该轮履复合变形履带机器人具有运动灵活、适应能力强、结构简单、工作稳定的优点。