
一种机床滑台齿轮传动装置.pdf

一条****轩吗


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机床滑台齿轮传动装置.pdf
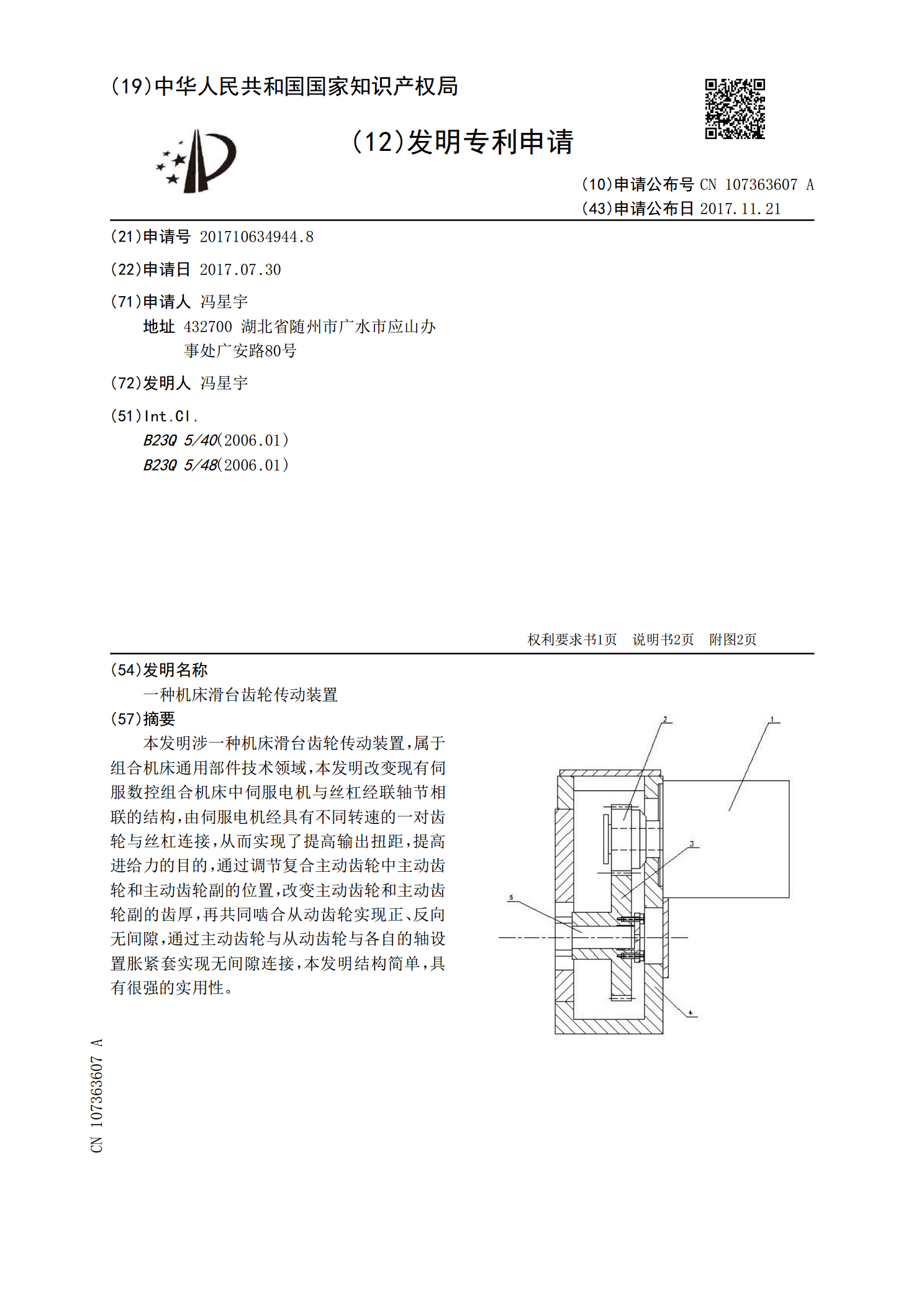
本发明涉一种机床滑台齿轮传动装置,属于组合机床通用部件技术领域,本发明改变现有伺服数控组合机床中伺服电机与丝杠经联轴节相联的结构,由伺服电机经具有不同转速的一对齿轮与丝杠连接,从而实现了提高输出扭距,提高进给力的目的,通过调节复合主动齿轮中主动齿轮和主动齿轮副的位置,改变主动齿轮和主动齿轮副的齿厚,再共同啮合从动齿轮实现正、反向无间隙,通过主动齿轮与从动齿轮与各自的轴设置胀紧套实现无间隙连接,本发明结构简单,具有很强的实用性。

机床滑台齿轮传动装置.pdf
本发明涉一种机床滑台齿轮传动装置,属于组合机床通用部件技术领域,本发明改变现有伺服数控组合机床中伺服电机与丝杠经联轴节相联的结构,由伺服电机经具有不同转速的一对齿轮与丝杠连接,从而实现了提高输出扭距,提高进给力的目的,通过调节复合主动齿轮中主动齿轮和主动齿轮副的位置,改变主动齿轮和主动齿轮副的齿厚,再共同啮合从动齿轮实现正、反向无间隙,通过主动齿轮与从动齿轮与各自的轴设置胀紧套实现无间隙连接,本发明结构简单,具有很强的实用性。

一种数控机床滑台齿轮传动装置.pdf
本发明涉一种机床滑台齿轮传动装置,属于组合机床通用部件技术领域,本发明改变现有伺服数控组合机床中伺服电机与丝杠经联轴节相联的结构,由伺服电机经具有不同转速的一对齿轮与丝杠连接,从而实现了提高输出扭距,提高进给力的目的,通过调节复合主动齿轮中主动齿轮和主动齿轮副的位置,改变主动齿轮和主动齿轮副的齿厚,再共同啮合从动齿轮实现正、反向无间隙,通过主动齿轮与从动齿轮与各自的轴设置胀紧套实现无间隙连接,本发明结构简单,具有很强的实用性。

伺服数控机床滑台齿轮传动装置.pdf
本发明涉一种伺服数控机床滑台齿轮传动装置,属于组合机床通用部件技术领域,本发明改变现有伺服数控组合机床中伺服电机与丝杠经联轴节相联的结构,由伺服电机经具有不同转速的一对齿轮与丝杠连接,从而实现了提高输出扭距,提高进给力的目的,通过调节复合主动齿轮中主动齿轮和主动齿轮副的位置,改变主动齿轮和主动齿轮副的齿厚,再共同啮合从动齿轮实现正、反向无间隙,通过主动齿轮与从动齿轮与各自的轴设置胀紧套实现无间隙连接,本发明结构简单,具有很强的实用性。
滑台结构及机床.pdf
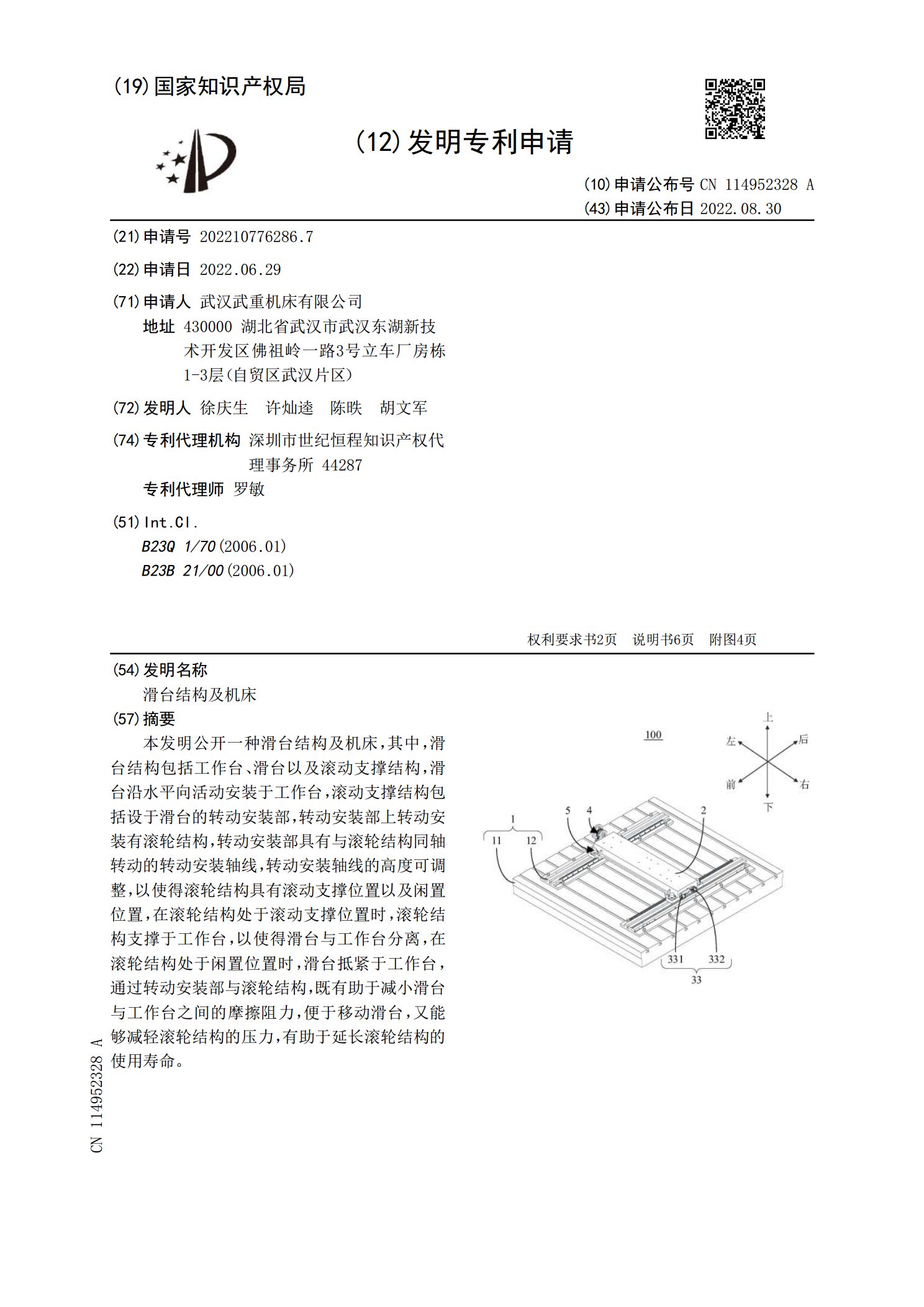
本发明公开一种滑台结构及机床,其中,滑台结构包括工作台、滑台以及滚动支撑结构,滑台沿水平向活动安装于工作台,滚动支撑结构包括设于滑台的转动安装部,转动安装部上转动安装有滚轮结构,转动安装部具有与滚轮结构同轴转动的转动安装轴线,转动安装轴线的高度可调整,以使得滚轮结构具有滚动支撑位置以及闲置位置,在滚轮结构处于滚动支撑位置时,滚轮结构支撑于工作台,以使得滑台与工作台分离,在滚轮结构处于闲置位置时,滑台抵紧于工作台,通过转动安装部与滚轮结构,既有助于减小滑台与工作台之间的摩擦阻力,便于移动滑台,又能够减轻滚轮