
一种混合动力系统及其控制方法.pdf

春波****公主

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种混合动力系统及其控制方法.pdf
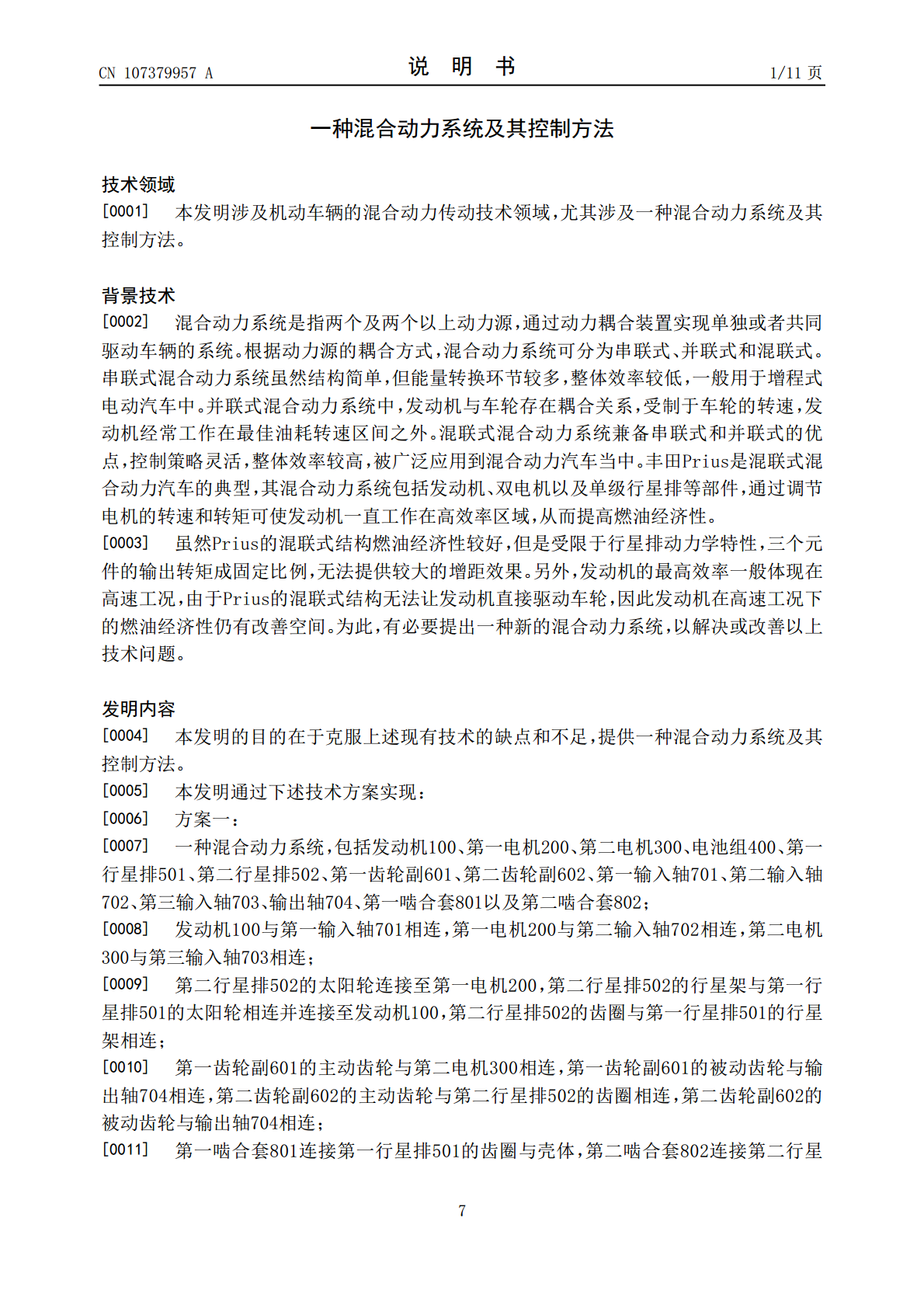
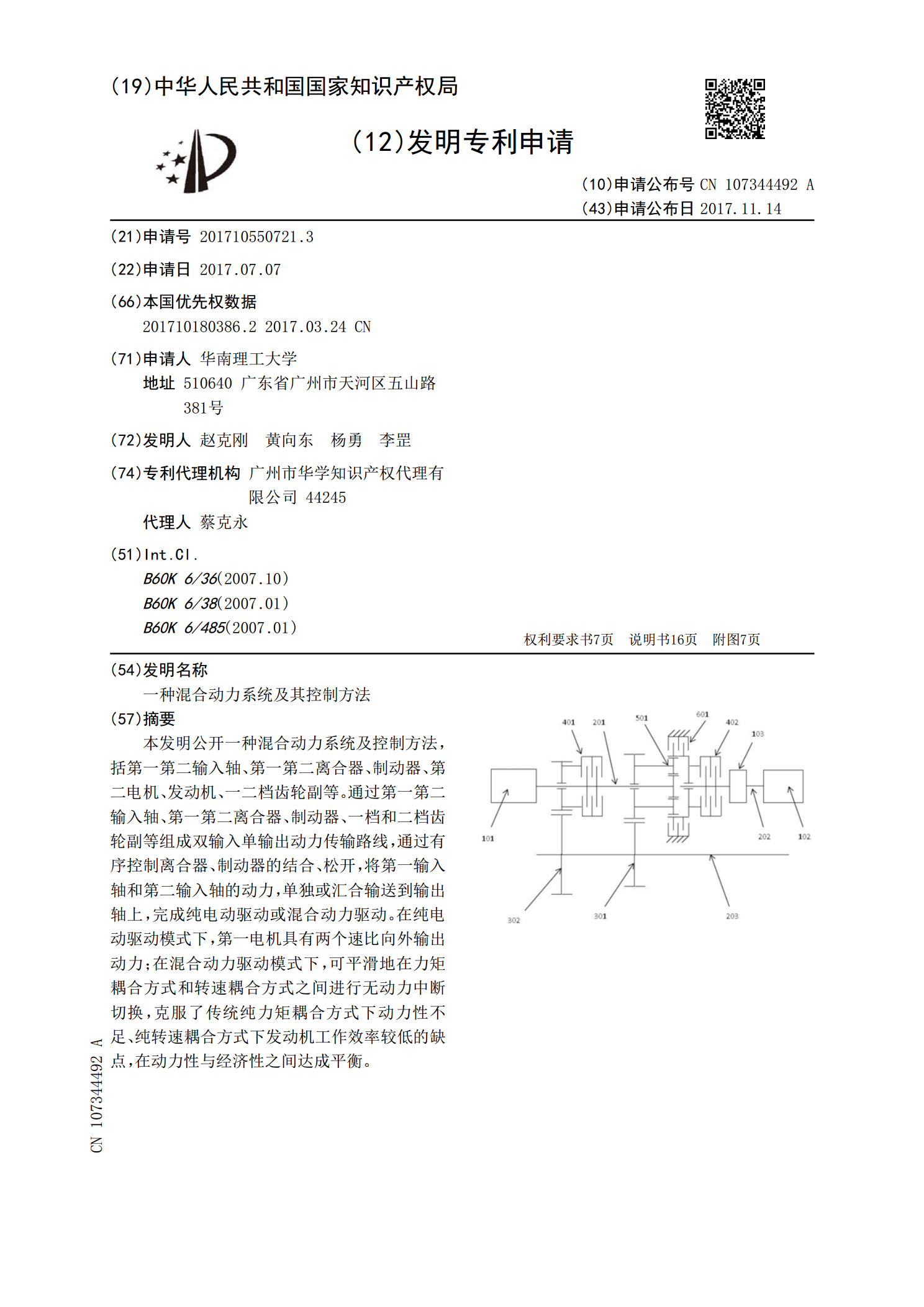
本发明公开一种混合动力系统及控制方法,括第一第二输入轴、第一第二离合器、制动器、第二电机、发动机、一二档齿轮副等。通过第一第二输入轴、第一第二离合器、制动器、一档和二档齿轮副等组成双输入单输出动力传输路线,通过有序控制离合器、制动器的结合、松开,将第一输入轴和第二输入轴的动力,单独或汇合输送到输出轴上,完成纯电动驱动或混合动力驱动。在纯电动驱动模式下,第一电机具有两个速比向外输出动力;在混合动力驱动模式下,可平滑地在力矩耦合方式和转速耦合方式之间进行无动力中断切换,克服了传统纯力矩耦合方式下动力性不足、纯
一种混合动力系统及其控制方法.pdf
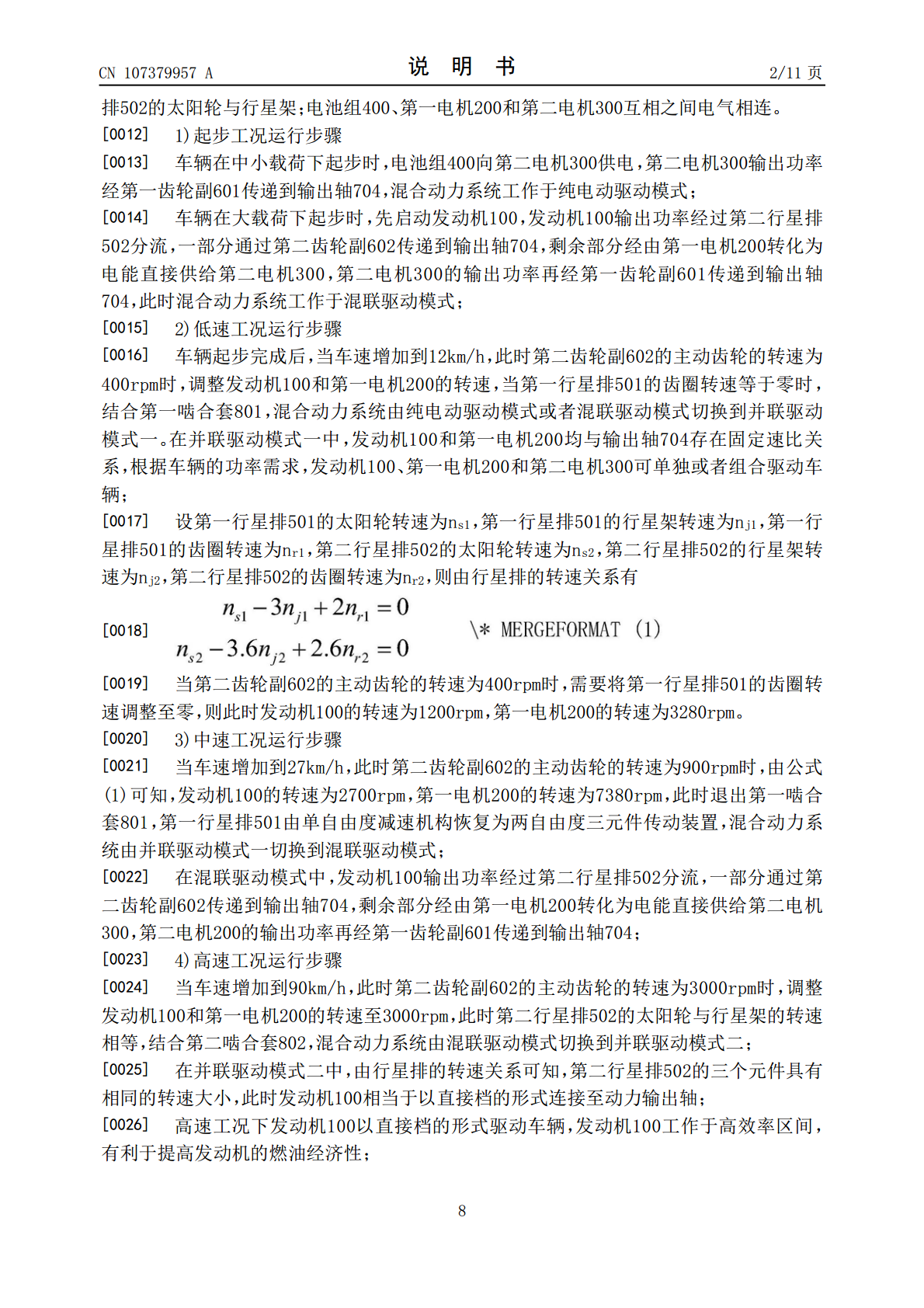
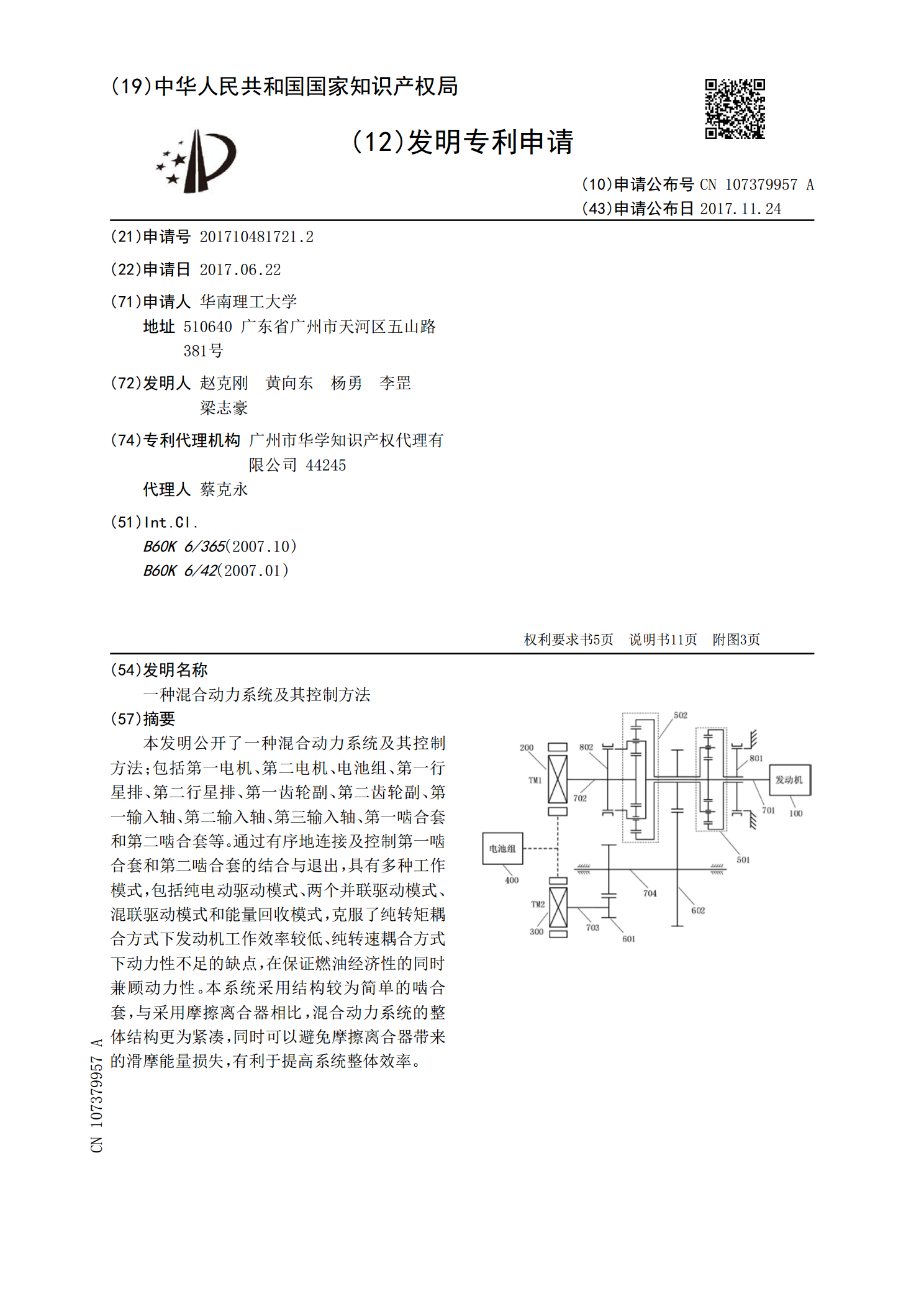
本发明公开了一种混合动力系统及其控制方法;包括第一电机、第二电机、电池组、第一行星排、第二行星排、第一齿轮副、第二齿轮副、第一输入轴、第二输入轴、第三输入轴、第一啮合套和第二啮合套等。通过有序地连接及控制第一啮合套和第二啮合套的结合与退出,具有多种工作模式,包括纯电动驱动模式、两个并联驱动模式、混联驱动模式和能量回收模式,克服了纯转矩耦合方式下发动机工作效率较低、纯转速耦合方式下动力性不足的缺点,在保证燃油经济性的同时兼顾动力性。本系统采用结构较为简单的啮合套,与采用摩擦离合器相比,混合动力系统的整体结构

一种混合动力汽车动力系统及其控制方法.pdf
本发明公开了一种混合动力汽车动力系统,包括发动机、第一离合器、CVT变速器、第二离合器、驱动电机和换挡装置;所述发动机通过第一离合器与CVT变速器连接;所述驱动电机的与CVT变速器连接;所述CVT变速器通过第二离合器和换挡装置的输入轴连接。本发明的混合动力动力系统相对于其他CVT混合动力系统成本低,同时保留了发动机驱动时CVT换挡平顺高效的优点。
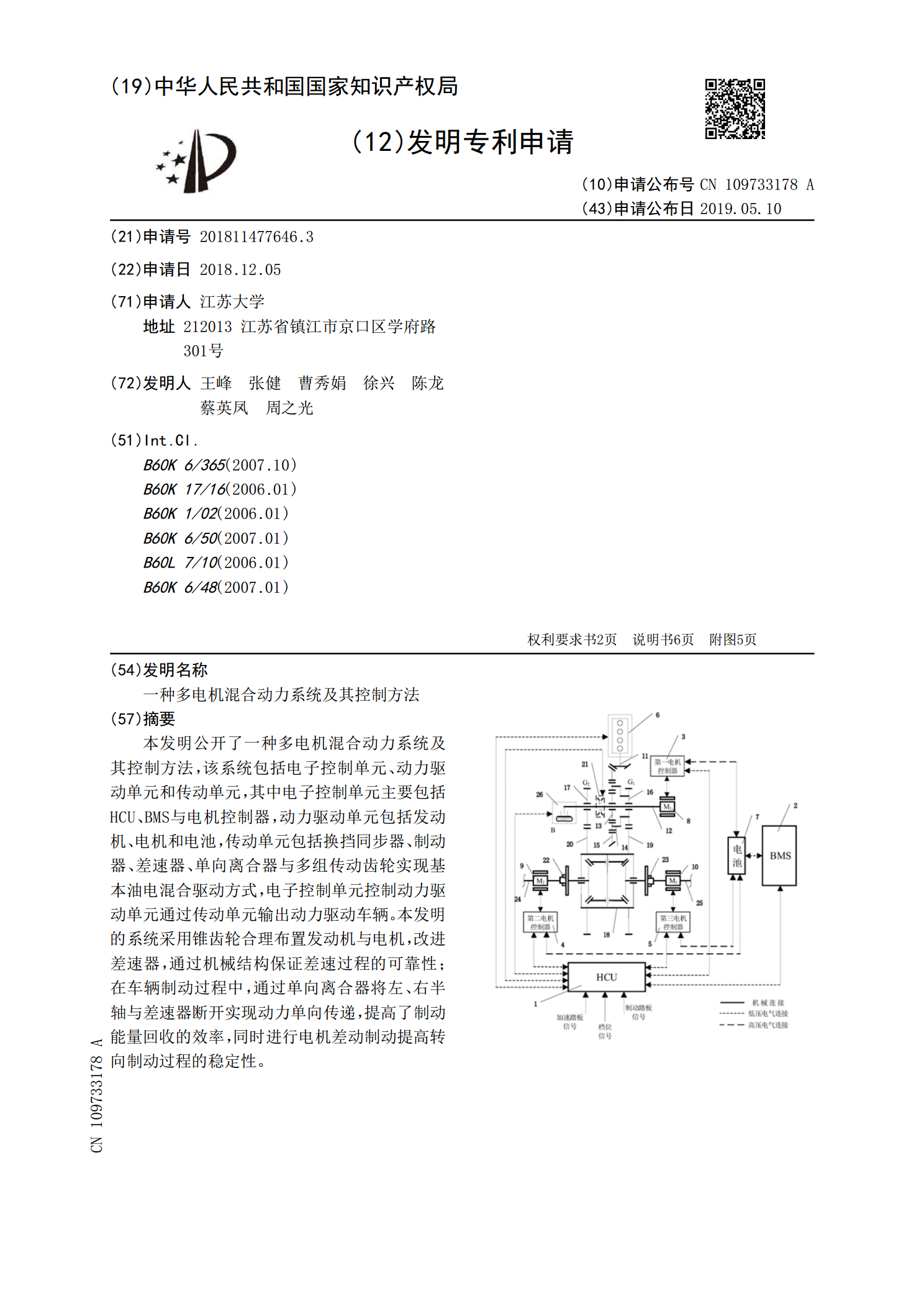
一种多电机混合动力系统及其控制方法.pdf
本发明公开了一种多电机混合动力系统及其控制方法,该系统包括电子控制单元、动力驱动单元和传动单元,其中电子控制单元主要包括HCU、BMS与电机控制器,动力驱动单元包括发动机、电机和电池,传动单元包括换挡同步器、制动器、差速器、单向离合器与多组传动齿轮实现基本油电混合驱动方式,电子控制单元控制动力驱动单元通过传动单元输出动力驱动车辆。本发明的系统采用锥齿轮合理布置发动机与电机,改进差速器,通过机械结构保证差速过程的可靠性;在车辆制动过程中,通过单向离合器将左、右半轴与差速器断开实现动力单向传递,提高了制动能量
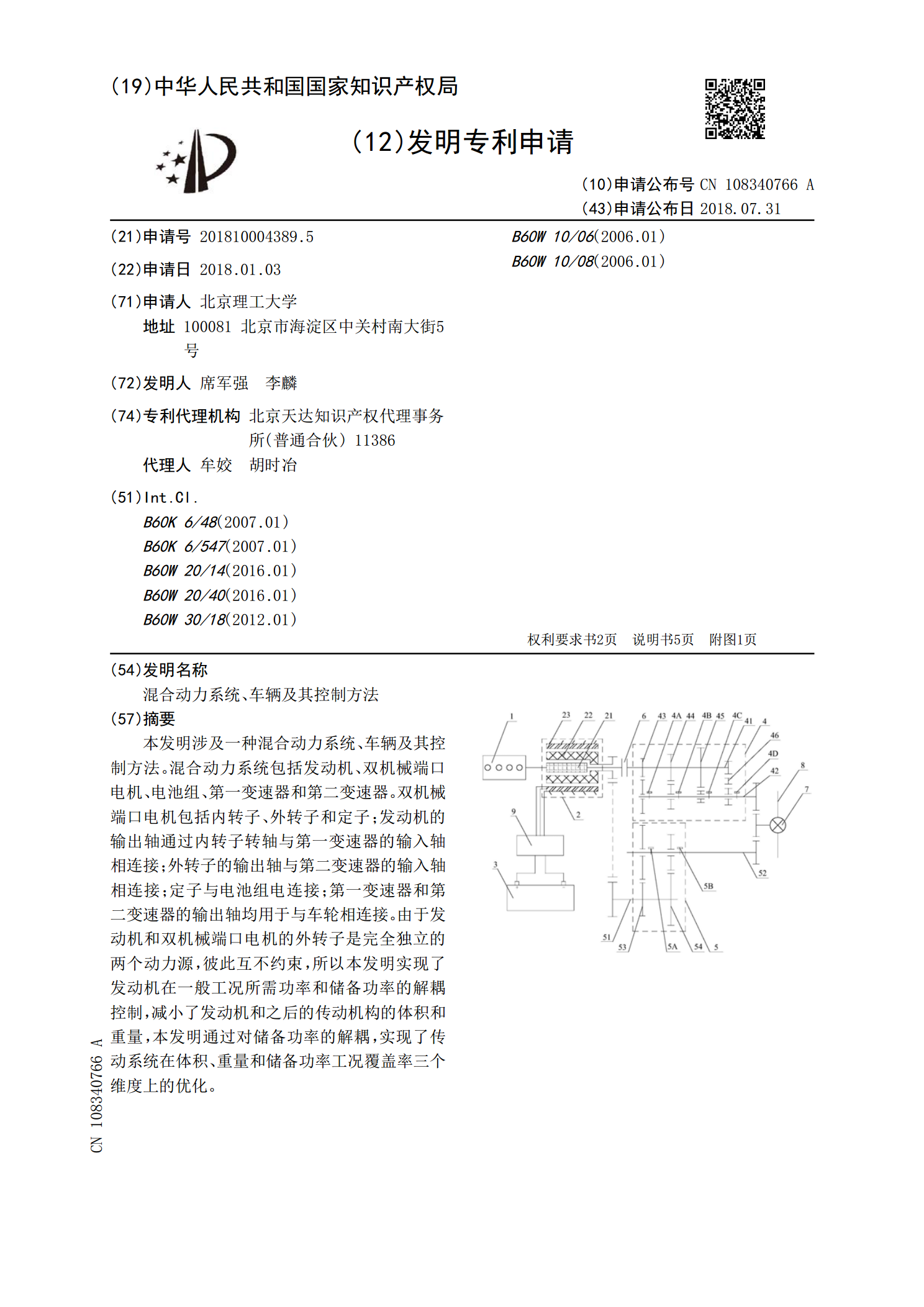
混合动力系统、车辆及其控制方法.pdf
本发明涉及一种混合动力系统、车辆及其控制方法。混合动力系统包括发动机、双机械端口电机、电池组、第一变速器和第二变速器。双机械端口电机包括内转子、外转子和定子;发动机的输出轴通过内转子转轴与第一变速器的输入轴相连接;外转子的输出轴与第二变速器的输入轴相连接;定子与电池组电连接;第一变速器和第二变速器的输出轴均用于与车轮相连接。由于发动机和双机械端口电机的外转子是完全独立的两个动力源,彼此互不约束,所以本发明实现了发动机在一般工况所需功率和储备功率的解耦控制,减小了发动机和之后的传动机构的体积和重量,本发明通