
防抱死制动控制装置.pdf

桂香****盟主

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

防抱死制动控制装置.pdf
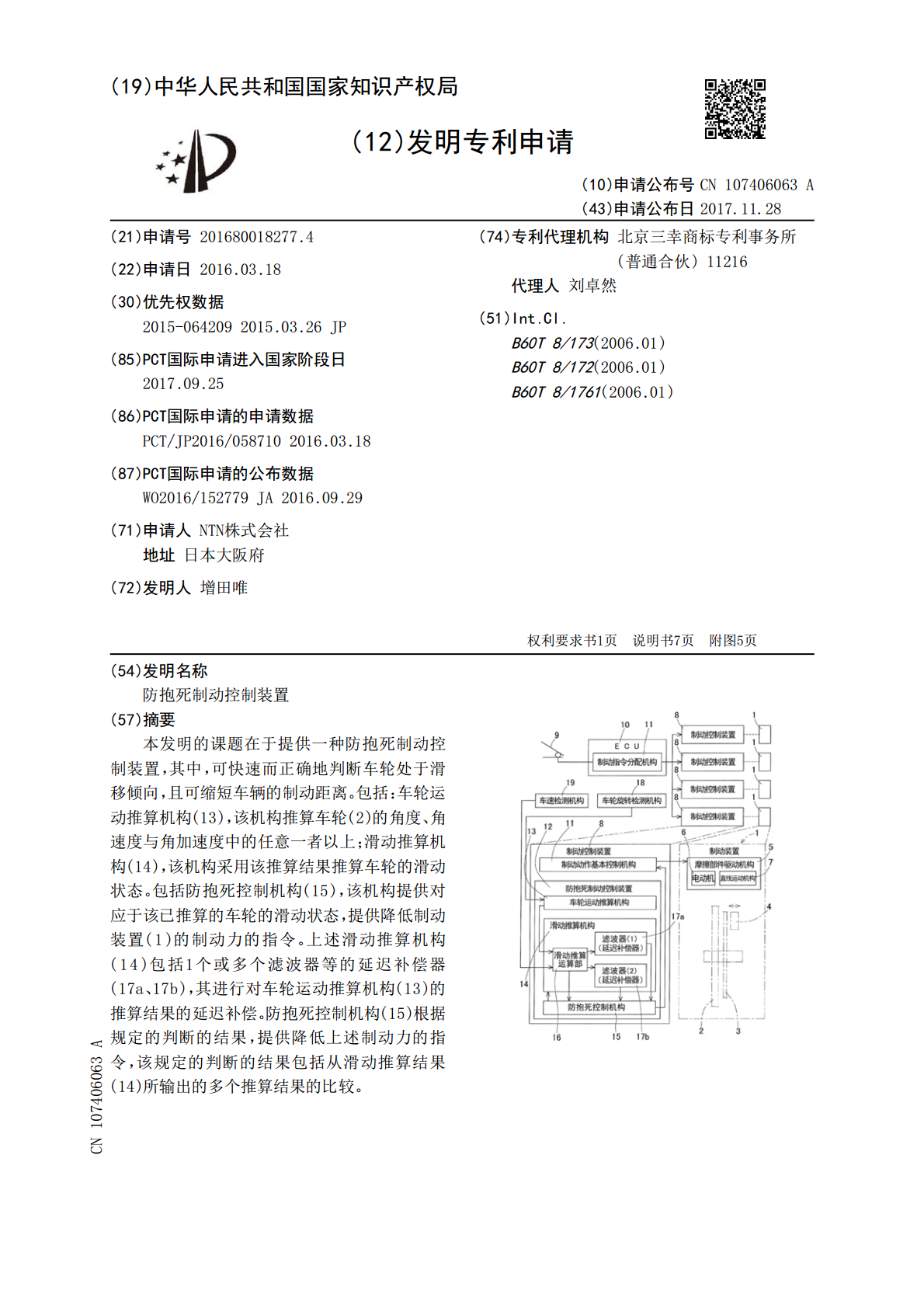
本发明的课题在于提供一种防抱死制动控制装置,其中,可快速而正确地判断车轮处于滑移倾向,且可缩短车辆的制动距离。包括:车轮运动推算机构(13),该机构推算车轮(2)的角度、角速度与角加速度中的任意一者以上;滑动推算机构(14),该机构采用该推算结果推算车轮的滑动状态。包括防抱死控制机构(15),该机构提供对应于该已推算的车轮的滑动状态,提供降低制动装置(1)的制动力的指令。上述滑动推算机构(14)包括1个或多个滤波器等的延迟补偿器(17a、17b),其进行对车轮运动推算机构(13)的推算结果的延迟补偿。防抱

防抱死制动控制装置.pdf
一种防抱死制动控制装置,能够仅基于实施防抱死制动控制的车轮的转速来实施符合实际路面状况的防抱死制动控制。防抱死制动控制机构(65),在基于检测出的转速(V)计算出的前轮减速度(G)超过第一打滑检测阈值(G1)的情况下,判定为前轮(WF)进入锁定状态,并且,对随驾驶员的操作而产生的制动压力进行释放控制,以解除锁定状态。包括路面摩擦推算机构(66),其基于随对制动压力的释放控制而使前轮(WF)恢复旋转时产生的恢复加速度(Gf),推导出推算减速度(Gs),推算减速度(Gs)作为车辆(1)停止的难易度指标且至少以

防抱死制动系统及其控制方法、装置.pdf
一种防抱死制动系统及其控制方法、装置。所述方法包括:根据所述电池SOC信号及各个车轮的轮速信号,控制轮毂电机的工作状态,并按照所述轮毂电机的不同工作状态,对各个车轮的总目标制动转矩进行分配,并将分配后的各个车轮的总目标制动转矩分别发送至对应的从制动控制器,由对应的从制动控制器按照所分配的总目标制动转矩分别控制对应电机的输出转矩;所述从制动控制器包括:第一从制动控制器及第二从制动控制器,第一从制动控制器按照所分配的总目标制动转矩控制对应的电子机械制动器的输出转矩,第二从制动控制器按照所分配的总目标制动转矩控

液压防抱死制动装置.pdf
本发明公开了一种液压防抱死制动装置,具有装有液压油的油箱、泵电机组、单向阀、先导式溢流阀、手动二位三通阀、可调节流阀、高压进油管和回油管,其中:所述高压进油管和回油管连接互负反馈液控二位四通阀,互负反馈液控二位四通阀连接制动油缸,制动油缸连接有磨擦片;所述互负反馈液控二位四通阀的内腔两端设有与阀芯腔相连通的快跳阀孔,快跳阀位于快跳阀孔内,所述制动油缸内腔的两端设有反馈槽,反馈槽通过油道连通快跳阀孔。与现有技术相比,其由冲击力作功代替摩擦力作功,刹车片制动频率300次/秒以上,实现了冲击力作功,减小了惯性力

车辆制动防抱死装置及方法.pdf
本发明一种车辆制动防抱死装置,包括:机械刹车单元、轮速传感器、微控制器以及防抱死执行单元。机械刹车单元刹车线。本发明车辆制动防抱死装置由于采用微控制器检测车轮抱死状况,并控制防抱死执行单元产生拉动刹车线的防抱死拉力,及时降低存在车轮抱死状况的车轮上的制动力,有效防止车轮抱死状况,结构简单,成本低,可适用于机械刹车系统的防抱死。