
作业车辆以及作业车辆的控制方法.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共39页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
作业车辆以及作业车辆的控制方法.pdf
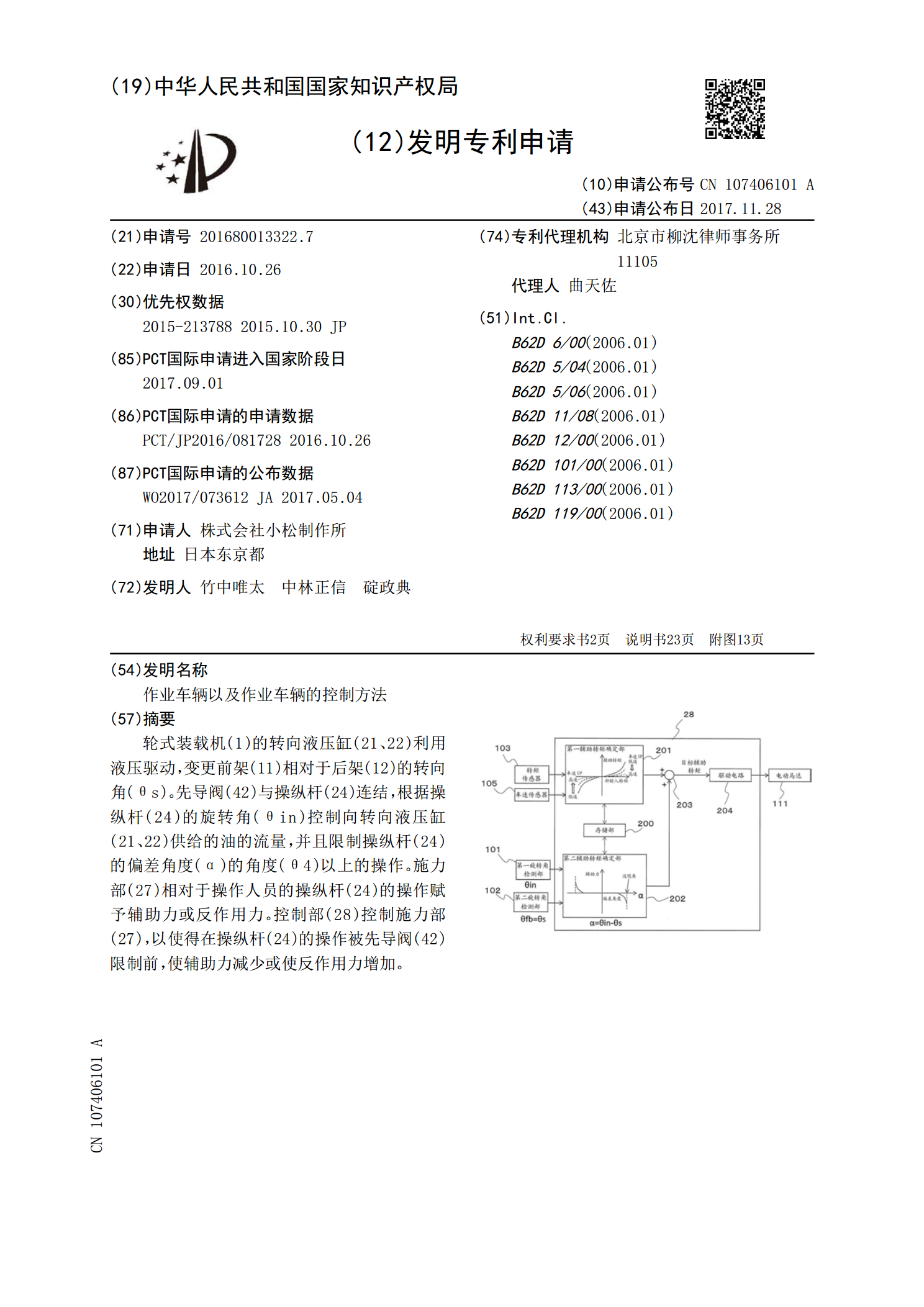
轮式装载机(1)的转向液压缸(21、22)利用液压驱动,变更前架(11)相对于后架(12)的转向角(θs)。先导阀(42)与操纵杆(24)连结,根据操纵杆(24)的旋转角(θin)控制向转向液压缸(21、22)供给的油的流量,并且限制操纵杆(24)的偏差角度(α)的角度(θ4)以上的操作。施力部(27)相对于操作人员的操纵杆(24)的操作赋予辅助力或反作用力。控制部(28)控制施力部(27),以使得在操纵杆(24)的操作被先导阀(42)限制前,使辅助力减少或使反作用力增加。

作业车辆以及作业车辆的控制方法.pdf
作业车辆包括:转向缸,其利用供给的工作油使作业车辆的转向轮动作;转向构件,其接受用于使转向轮动作的输入;转阀单元,其与转向构件连结,且向转向缸供给工作油;第一检测器,其检测转向构件的操作量;第二检测器,其检测转向轮的转向角度;第三检测器,其检测作业车辆的速度;第一运算部,其求出相对于由第一检测器检测到的转向构件的操作量的、作为转向轮的目标的转向角度的信息即目标信息;第二运算部,其求出与由第二检测器检测到的转向轮的实际转向角度对应的信息即实际转向角度信息;修正部,其修正实际转向角度信息相对于目标信息的偏移量

作业车辆以及作业车辆的控制方法.pdf
轮式装载机(1)具备:车身(2)、动臂(3)、铲斗(4)、动臂油缸(9)、铲斗油缸(10)、动臂角度检测传感器(46)、铲斗角度检测传感器(47)、对作为动臂所受到的力的提升力进行检测的动臂油缸压力传感器。轮式装载机(1)在规定的条件成立时使铲斗(4)的倾转动作开始,并根据从倾转动作开始的时刻起提升力上升的量来使倾转动作结束。

作业车辆以及作业车辆的控制方法.pdf
轮式装载机(1)的转向液压缸(21、22)由液压驱动,根据操纵杆(24)的操作进行变更前架(11)相对于后车架(12)的转向角θs的铰接动作。先导阀(42)与操纵杆(24)连结,控制向转向液压缸(21、22)供给的油的流量,以使得转向角θs与旋转角θin一致。施力部(27)对操纵杆(24)的操作施加辅助力或反作用力。控制部(28)基于铰接动作的开始时刻的一例即偏差角度±θ7,控制施力部(27),以使得对操纵杆的操作产生阻力。
作业车辆的控制系统、方法以及作业车辆.pdf
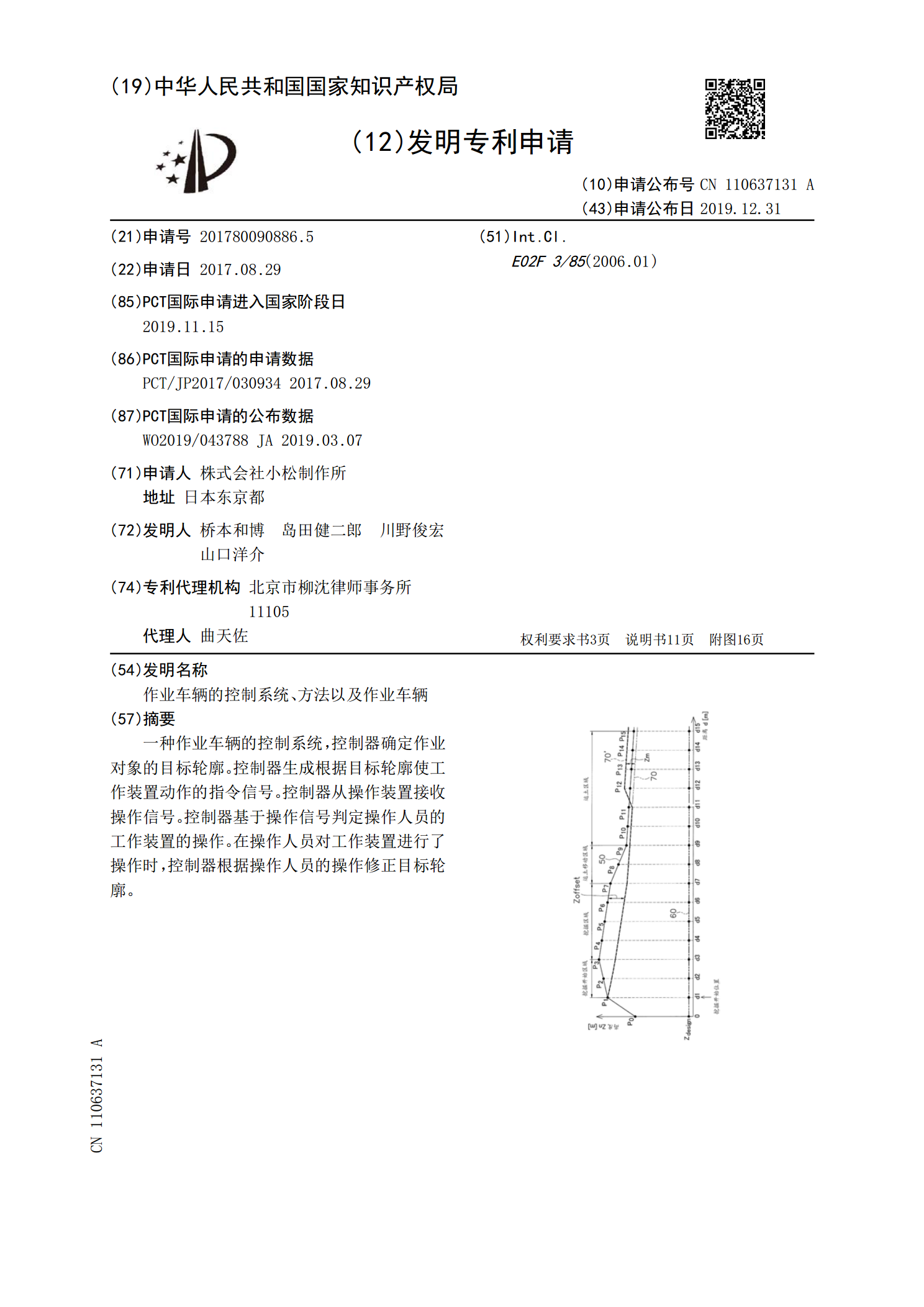
一种作业车辆的控制系统,控制器确定作业对象的目标轮廓。控制器生成根据目标轮廓使工作装置动作的指令信号。控制器从操作装置接收操作信号。控制器基于操作信号判定操作人员的工作装置的操作。在操作人员对工作装置进行了操作时,控制器根据操作人员的操作修正目标轮廓。