
一种自主式轻量化爬壁机器人检测系统及其使用方法.pdf

书生****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自主式轻量化爬壁机器人检测系统及其使用方法.pdf
本发明公开了一种自主式轻量化爬壁机器人检测系统及其使用方法,包括机器人本体、远程控制系统、无线通讯装置a和无线通讯装置b,远程控制系统与无线通讯装置a无线连接,无线通讯装置a与无线通讯装置b电连接,无线通讯装置b与远程控制系统无线连接,机器人本体包括壳体、底板、驱动机构、吸附单元和/或云台和/或万向轮。本发明使无线通讯装置B和无线通讯装置A之间的通讯信息通过无线通讯装置a和无线通讯装置b来传递,能够增强输送信号;除此以外,本发明采用在移动轮两侧均设置吸附单元的方式,有效的提升了磁能利用率,降低了机器人本体
一种自主式可重构爬壁机器人检测系统及其使用方法.pdf
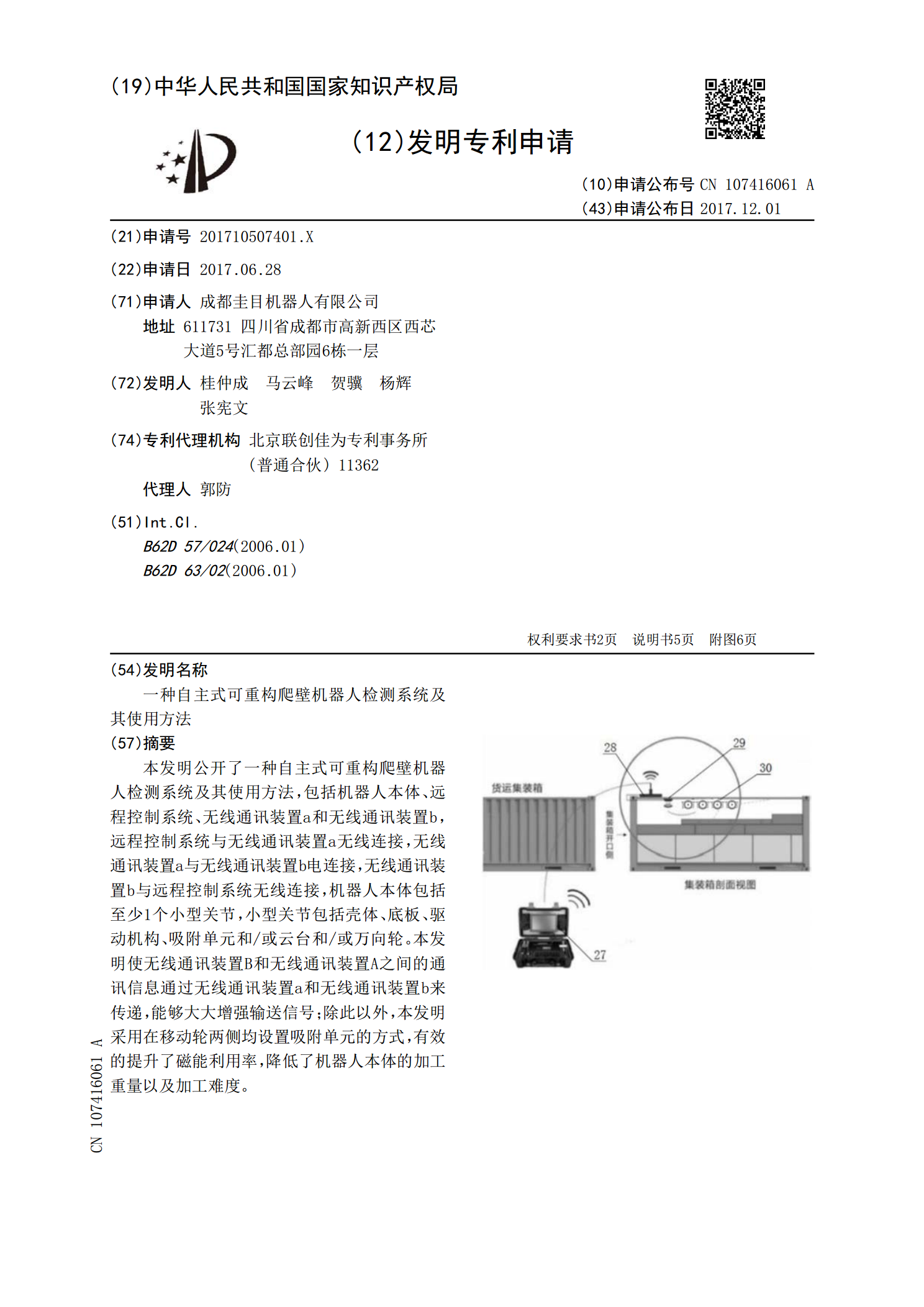
本发明公开了一种自主式可重构爬壁机器人检测系统及其使用方法,包括机器人本体、远程控制系统、无线通讯装置a和无线通讯装置b,远程控制系统与无线通讯装置a无线连接,无线通讯装置a与无线通讯装置b电连接,无线通讯装置b与远程控制系统无线连接,机器人本体包括至少1个小型关节,小型关节包括壳体、底板、驱动机构、吸附单元和/或云台和/或万向轮。本发明使无线通讯装置B和无线通讯装置A之间的通讯信息通过无线通讯装置a和无线通讯装置b来传递,能够大大增强输送信号;除此以外,本发明采用在移动轮两侧均设置吸附单元的方式,有效的

一种轻量化的爬壁机器人及其检测方法.pdf
本发明公开了一种轻量化的爬壁机器人,包括机器人本体,机器人本体包括壳体、底板、驱动装置、吸附单元和/或云台和/或万向轮,壳体与底板连接,驱动装置设置于底板的内侧面板上,吸附单元设置于底板的外侧面板上,万向轮设置于底板的外侧面板上,云台设置于壳体顶面上,该机器人采用在驱动轮两侧设置吸附单元的方式,有效的提升了磁能利用率,使该机器人可在带有障碍物的水平壁面、竖直壁面或者导磁壁面上自由移动和转向,同时,降低了机器人本体的加工重量以及加工难度;采用本发明的检测方法,能够大大提高对于集装箱内物品的检测效率及检测的有

一种可自主上壁的飞行爬壁机器人及其使用方法.pdf
一种可自主上壁的飞行爬壁机器人,包括机器人壳体及其上设置的前主旋翼机构、后主旋翼机构、前副旋翼机构与后副旋翼机构,其中,前、后主旋翼机构中主旋翼叶片所在的主旋转区与机器人壳体的顶面相平行,前、后副旋翼机构中副旋翼叶片所在的副旋转区与机器人壳体的顶面相垂直,机器人壳体的四角各经驱动杆、转向舵机与方形履带轮相连接,机器人壳体前端的开口槽经辅助舵机与带伸缩杆的伸缩装置相连接,且在机器人壳体上设置有一个与其余设备进行信号连接的飞行控制器。本设计可以实现地面、自主上壁、壁面转换等爬壁行为,不仅适应性较强,自动化程度
一种轻量化磁轮吸附式爬壁机器人.pdf
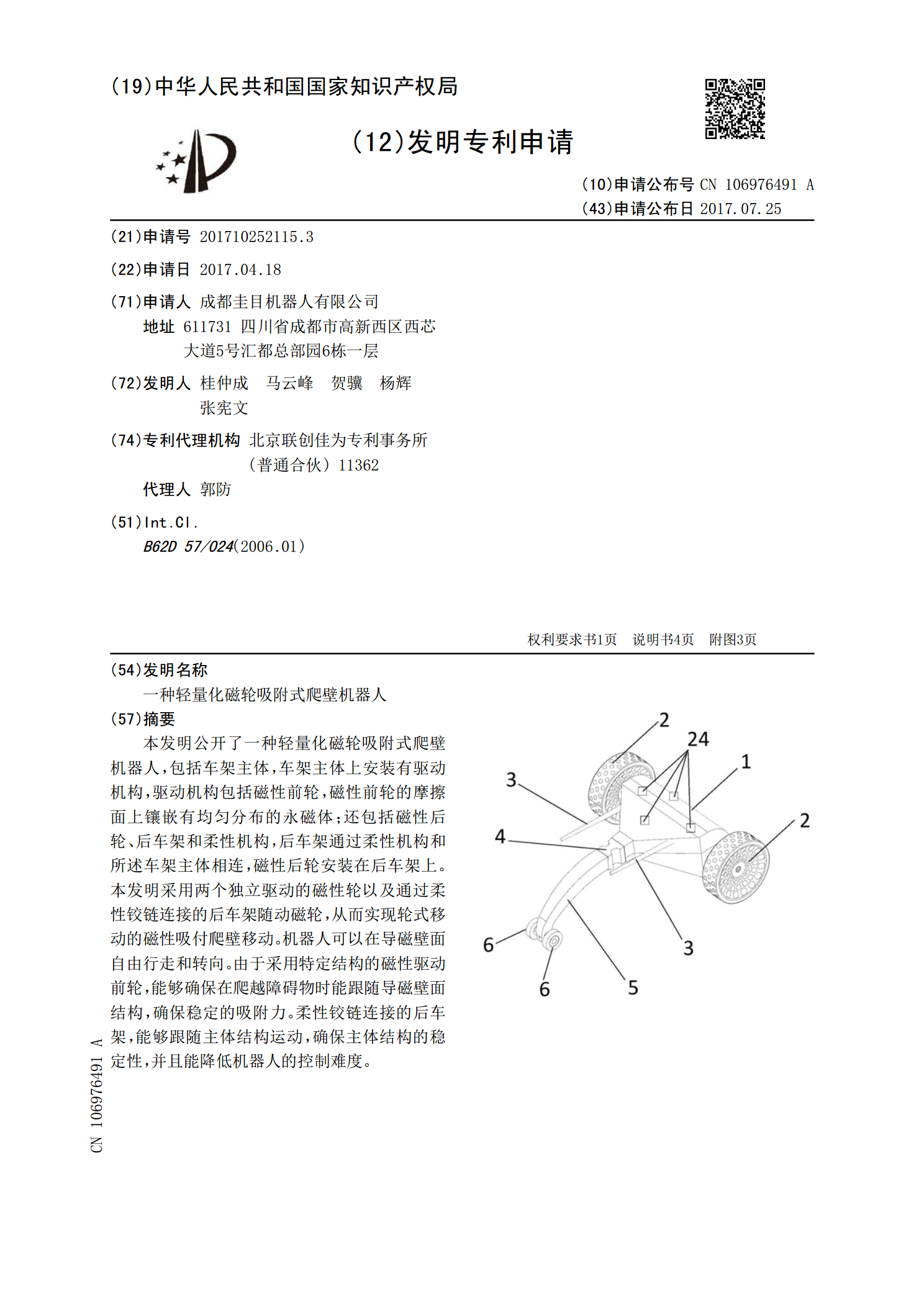
本发明公开了一种轻量化磁轮吸附式爬壁机器人,包括车架主体,车架主体上安装有驱动机构,驱动机构包括磁性前轮,磁性前轮的摩擦面上镶嵌有均匀分布的永磁体;还包括磁性后轮、后车架和柔性机构,后车架通过柔性机构和所述车架主体相连,磁性后轮安装在后车架上。本发明采用两个独立驱动的磁性轮以及通过柔性铰链连接的后车架随动磁轮,从而实现轮式移动的磁性吸付爬壁移动。机器人可以在导磁壁面自由行走和转向。由于采用特定结构的磁性驱动前轮,能够确保在爬越障碍物时能跟随导磁壁面结构,确保稳定的吸附力。柔性铰链连接的后车架,能够跟随主体