
一种拇指功能康复的外骨骼机器人.pdf

琰琬****买买


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种拇指功能康复的外骨骼机器人.pdf
一种拇指功能康复的外骨骼机器人,它涉及一种外骨骼机器人。本发明解决现有的康复机械手未能充分模拟手指关节的自然运动,存在康复治疗的效果不尽人意以及不具备感知功能的问题。其中指间关节单元和掌指关节单元均采用平面导杆机构来驱动拇指的指间关节和掌指关节作屈曲或伸展运动;拇指腕骨关节单元通过掌背调整机构直接与拇指的腕骨关节对心实现腕骨关节的内收或外展运动;所述传动驱动机构采用直流电机作为动力源,绕线轮模块通过鲍登线将直流电机输出的力矩传递到指间关节单元、掌指关节单元和腕骨关节单元。本发明的拇指功能康复的外骨骼机器人

外骨骼式拇指运动功能康复机器人.pdf
本发明涉及一种外骨骼式的拇指运动功能康复机器人,由执行部分、传动部分和驱动部分组成;执行部分分为指间关节模块、掌指关节模块和腕掌关节模块三大部分;所述腕掌关节模块中,掌骨座固定在患者的手掌和手腕上;掌骨座与掌骨座连接成30°倾角,掌骨座连接自身有45°的角度;角度传感器固连在关节水平旋转上;角度传感器与外展/内收线轮固连;可调轴承座与尺寸调节插孔固连;腕掌从动杆一端和可调轴承座形成转动副,一端和腕掌主动杆形成转动副;腕掌主动杆固定在腕掌主动轴上,主动轴与腕掌主动轴承座形成转动副。本发明实现了拇指四个自由度

多自由度拇指辅助的软体康复外骨骼机器人.pdf
本发明涉及医用康复训练和助力设备,具体地说是一种多自由度拇指辅助的软体康复外骨骼机器人,包括软体外骨骼手套、肌腱拉力线、柔性连杆、驱动装置及控制系统,肌腱拉力线一端连接直线驱动器,另一端连接软体外骨骼手套用以驱动拇指的外展/内收和弯曲/伸展两个自由度;柔性连杆一端与拇指指套铰接,另一端与手背结构件铰接,并通过肌腱拉力线的收缩沿着滑动槽移动,从而驱动拇指的内收和外展运动;肌腱拉力线连接拇指背侧驱动拇指的伸展运动,另一根拉力线连接拇指掌侧驱动拇指的弯曲运动。本发明可以有效地助力中风患者的拇指运动,以完成所需的
一种康复外骨骼机器人.pdf
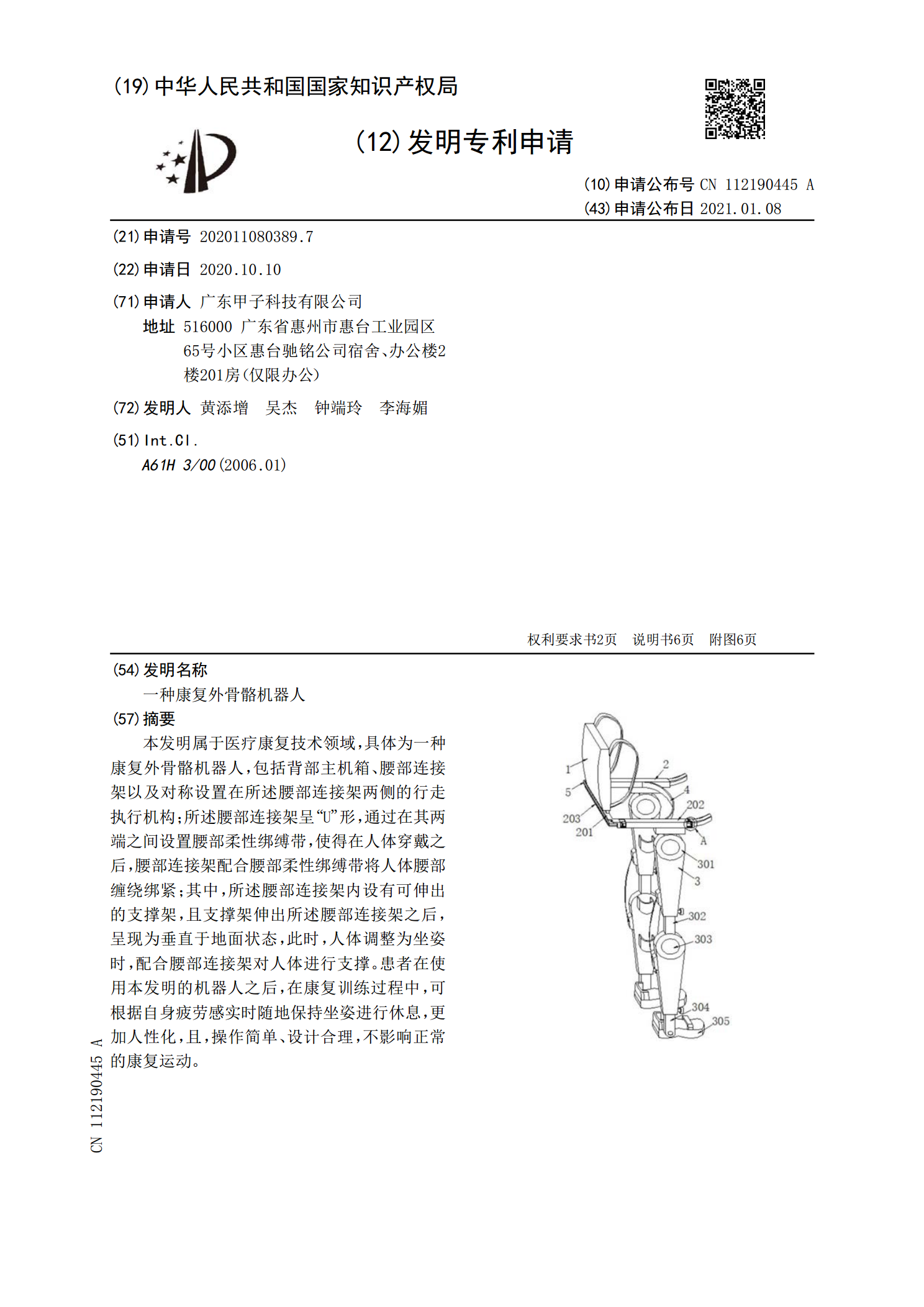
本发明属于医疗康复技术领域,具体为一种康复外骨骼机器人,包括背部主机箱、腰部连接架以及对称设置在所述腰部连接架两侧的行走执行机构;所述腰部连接架呈“U”形,通过在其两端之间设置腰部柔性绑缚带,使得在人体穿戴之后,腰部连接架配合腰部柔性绑缚带将人体腰部缠绕绑紧;其中,所述腰部连接架内设有可伸出的支撑架,且支撑架伸出所述腰部连接架之后,呈现为垂直于地面状态,此时,人体调整为坐姿时,配合腰部连接架对人体进行支撑。患者在使用本发明的机器人之后,在康复训练过程中,可根据自身疲劳感实时随地保持坐姿进行休息,更加人性化

外骨骼式手指运动功能康复机器人.pdf
本发明涉及一种外骨骼式手指运动功能康复机器人,包括执行部分、远近端关节驱动和掌骨关节驱动三部分;远近端关节驱动和掌骨关节驱动相互独立,通过钢丝绳实现对执行部分的单独双向驱动,所述的执行部分包括远端关节模块、近端关节模块和掌骨关节模块三大部分;每个模块之间则通过移动轴承座的滑动槽与主动轴承座连接,同时,利用移动轴承座上的滑动槽可以调节模块之间的距离,来实现适应不同患者手尺寸的功能;所述的远近端关节驱动和掌骨关节驱动部分都主要由装有编码器的电机、螺线轮、减速轮、主动轮和固定架组成。本发明可以对手指的每个关节进