
一种用于智能机器人的底盘滑动机构.pdf

静芙****可爱


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于智能机器人的底盘滑动机构.pdf
本发明公开了一种用于智能机器人的底盘滑动机构,所述底盘滑动机构包括底盘,所述底盘的下表面固定有沿竖直方向设置的滑杆,所述滑杆上可滑动地设置有滑套,所述底盘的下表面还固定有气缸,所述气缸一端固定在所述底盘上,另一端与所述滑套连接,使得所述气缸能够带动所述滑套沿所述滑杆的长度方向运动,所述滑杆的下端还铰接有滑轮架,所述滑轮架中远离所述滑杆的一端可转动地设置有滑轮,所述底盘滑动机构还包括支架,所述支架一端铰接在所述滑套上,另一端可滑动地设置在所述滑轮架表面;解决了现有的机器人底盘由于底面面积较大,很容易被卡住或

一种智能制造的用于机器人安装底盘的防倾倒机构.pdf
本发明涉及特殊作业技术领域,具体为一种智能制造的用于机器人安装底盘的防倾倒机构,所述底盘的中间内壁固定连接有第一齿框,所述第一齿框的内部啮合有紧固螺钉,所述紧固螺钉的顶端固定连接有固定柱,所述固定柱的顶端固定连接有接口,所述接口的外表面两侧均固定连接有电磁铁,所述固定柱的外表面两侧均活动连接有调节杆,所述固定柱的外表面两侧均固定连接有限位弹簧,所述限位弹簧的一端固定连接有铁块,所述铁块的一端固定连接有螺纹杆,通过调节杆的一端带动紧固螺钉向下移动并发生旋转,使紧固螺钉的底端逐渐向下嵌入土地下,缓冲机器人在突

用于车辆智能服务机器人的行走底盘.pdf
本发明涉及行走机构,具体涉及一种可应对复杂路面情况、行走更加稳定且重心更低的用于车辆智能服务机器人的行走底盘,包括底盘本体(1)、前行走轮组(2)、后行走轮组(3)、驱动轮(4)、减速电机(5)、减震弹簧(6)和站立踏板(7),所述前行走轮组(2)和后行走轮组(3)分别安装底盘本体(1)的前方和后方且与底盘本体(1)转动配合,所述前行走轮组(2)和后行走轮组(3)还通过减震弹簧(6)与底盘本体(1)相连接,所述驱动轮(4)安装在底盘本体(1)的中间位置,所述减速电机(5)安装在底盘本体(1)上且与驱动轮(

一种用于智能机器人的底部移动机构.pdf
本实用新型公开了一种用于智能机器人的底部移动机构,包括外部防护机构、传动调向机构和传动移动机构,所述外部防护机构的内部中端设置有传动移动机构,所述传动移动机构的外侧设置有传动调向机构,所述外部防护机构包括防护筒、盖板、圆槽、传动板和凹槽,所述防护筒的内部处设置有传动板,且传动板的边缘处开设有凹槽。该用于智能机器人的底部移动机构,采用多个机构之间的相互配合,功能性强,可以传动板内的传动移动机构,来使该移动机构进行向前侧进行移动,以达到带动智能机器人移动的目的,并可使整个传动移动机构被带动进行旋转,以达到调节
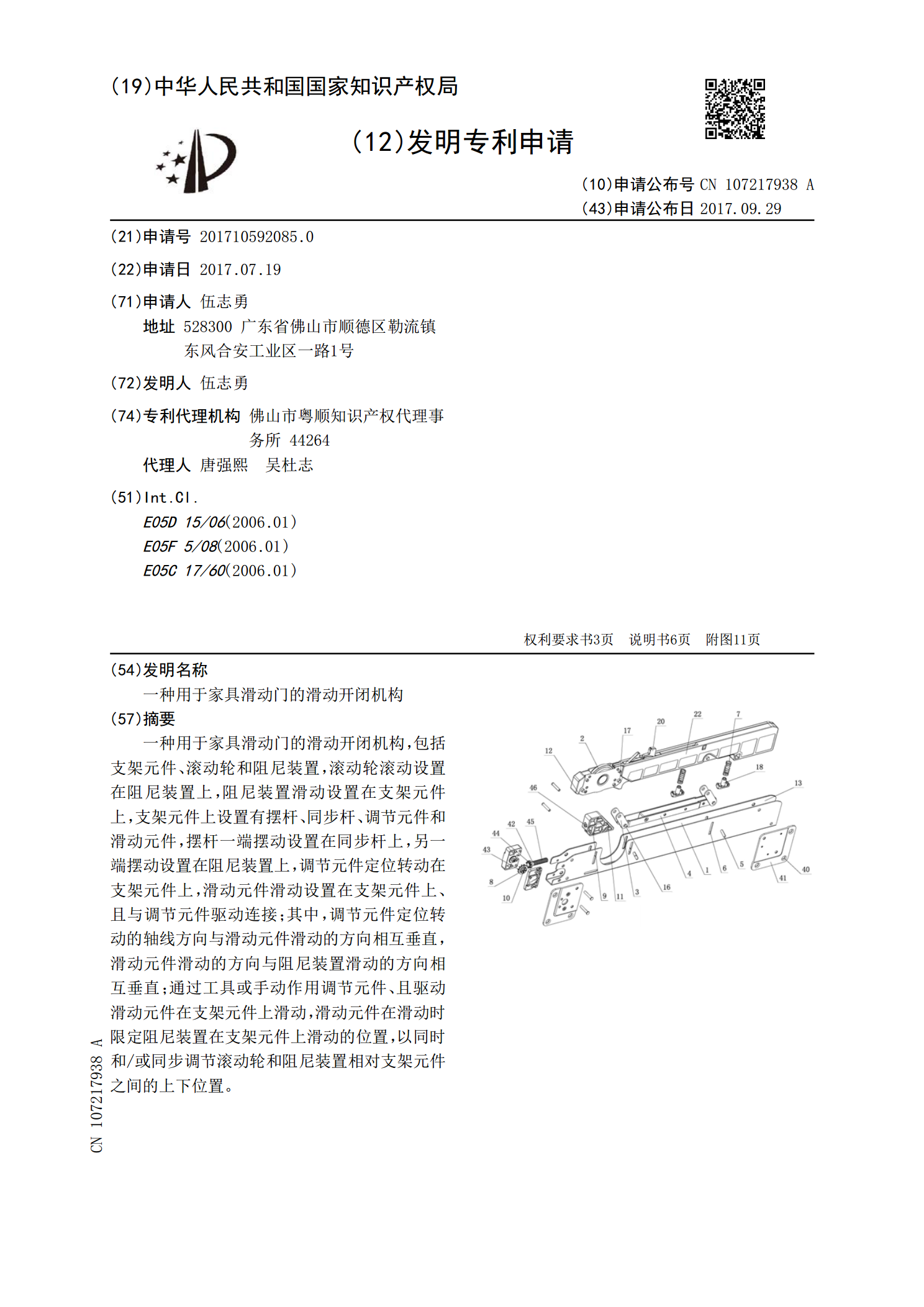
一种用于家具滑动门的滑动开闭机构.pdf
一种用于家具滑动门的滑动开闭机构,包括支架元件、滚动轮和阻尼装置,滚动轮滚动设置在阻尼装置上,阻尼装置滑动设置在支架元件上,支架元件上设置有摆杆、同步杆、调节元件和滑动元件,摆杆一端摆动设置在同步杆上,另一端摆动设置在阻尼装置上,调节元件定位转动在支架元件上,滑动元件滑动设置在支架元件上、且与调节元件驱动连接;其中,调节元件定位转动的轴线方向与滑动元件滑动的方向相互垂直,滑动元件滑动的方向与阻尼装置滑动的方向相互垂直;通过工具或手动作用调节元件、且驱动滑动元件在支架元件上滑动,滑动元件在滑动时限定阻尼装置