
一种智能移动机器人.pdf

韶敏****ab


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能移动机器人.pdf
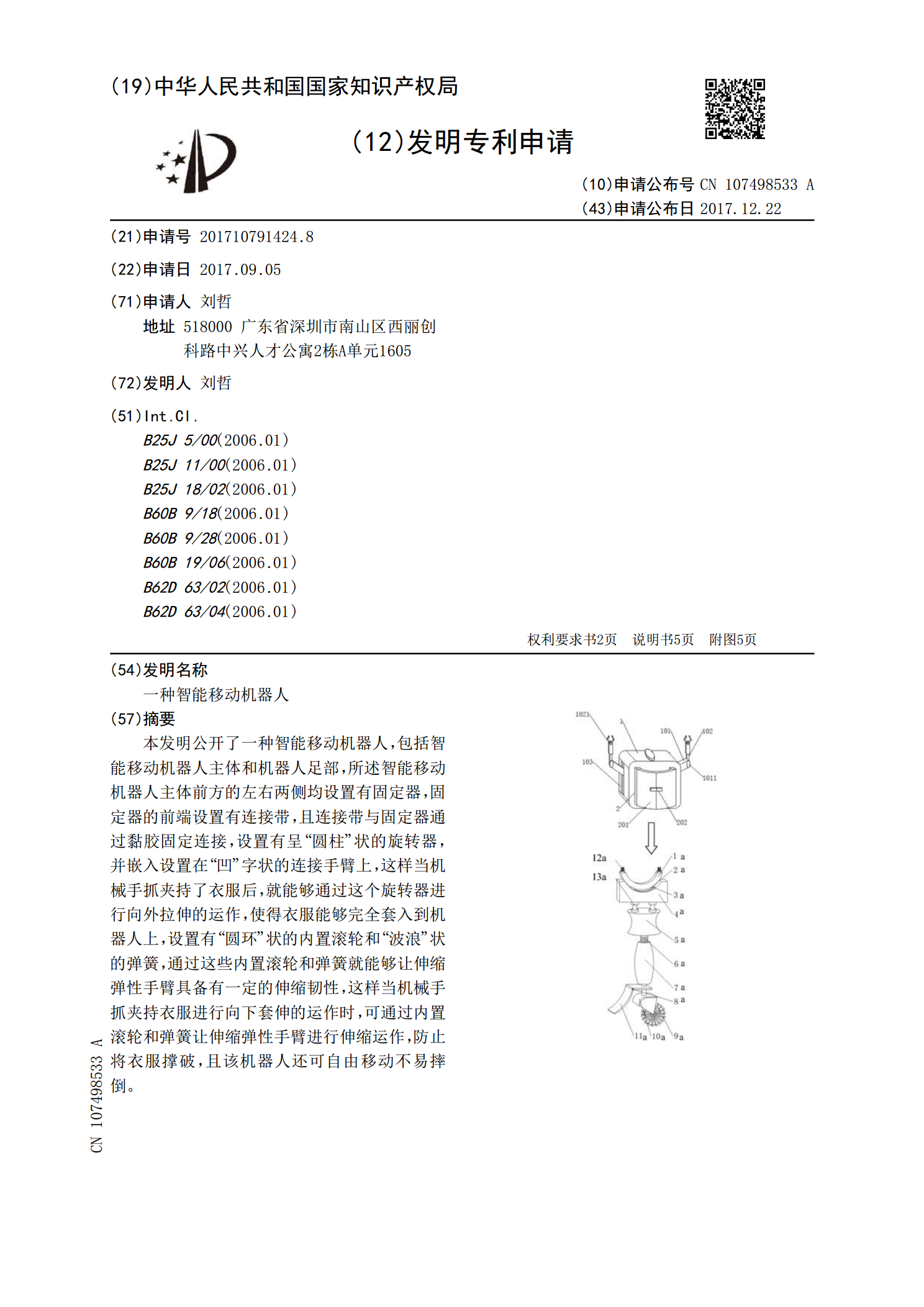
本发明公开了一种智能移动机器人,包括智能移动机器人主体和机器人足部,所述智能移动机器人主体前方的左右两侧均设置有固定器,固定器的前端设置有连接带,且连接带与固定器通过黏胶固定连接,设置有呈“圆柱”状的旋转器,并嵌入设置在“凹”字状的连接手臂上,这样当机械手抓夹持了衣服后,就能够通过这个旋转器进行向外拉伸的运作,使得衣服能够完全套入到机器人上,设置有“圆环”状的内置滚轮和“波浪”状的弹簧,通过这些内置滚轮和弹簧就能够让伸缩弹性手臂具备有一定的伸缩韧性,这样当机械手抓夹持衣服进行向下套伸的运作时,可通过内置滚

一种智能娱乐移动机器人.pdf
本发明公开一种智能娱乐移动机器人,车架前部两侧安装两个导向轮,后部两侧安装两个驱动轮,通过带有减速器的驱动电机驱动,还包括为整机提供电力的电源模块、监测模块,人机交互模块,通信模块,主控制模块、运动控制模块,采用光电位姿传感器与基于红外标签的移动视觉定位方式相结合的方法进行定位控制,一方面解决现有游乐设施智能化水平低下、设备功能单一、安全系数低的问题;另一方面解决目前移动机器人研究技术中机器人负载能力差、造价高昂而难以商业推广的问题。

一种智能全向移动机器人.pdf
本发明创造公开了一种智能全向移动机器人,包括圆形顶层板、圆形中层板、圆形底层板、上侧外围板、下侧外围板、控制器、无线通信模块、电源模块、蓄电池、电机驱动模块、激光传感器、超声波传感器、PSD传感器、操作面板、摄像头、三个驱动电机以及三个全向轮。该智能全向移动机器人利用各个传感器采集外部信号,由控制器相互协调实现机器人的全向移动、自主避障以及语音控制等功能,具有稳定性高、可靠性好,能够适应多种环境,自主智能避障运行,能够进行语音操控,可以广泛应用于智能物流系统中。

一种智能工厂移动机器人.pdf
本发明公开了一种智能工厂移动机器人,包括用于支撑整体框架的车体以及组成整体框架的主要机构,所述主要机构包括:动力机构、旋转机构、摆动机构、推轴机构、推板机构,所述动力机构右端内侧与后主动轮旋转配合衔接,所述后主动轮可旋转的贯穿对称设置的后轮板,所述后轮板右端内侧与后从动轮旋转配合衔接,所述动力机构左端内侧与前主动轮旋转配合衔接,所述动力机构左端内侧与前主动轮旋转配合衔接,所述前主动轮可旋转的贯穿对称设置的前轮板,所述前轮板左端内侧与前从动轮旋转配合衔接,本发明装置结构简单,使用方便,采用不同的灵活机构,提

一种新型智能工厂移动机器人.pdf
本发明公开了一种新型智能工厂移动机器人,包括用于支撑整体框架的车体以及组成整体框架的主要机构,所述主要机构包括:动力机构、旋转机构、摆动机构、推轴机构、推板机构,所述动力机构右端内侧与后主动轮旋转配合衔接,所述后主动轮可旋转的贯穿对称设置的后轮板,所述后轮板右端内侧与后从动轮旋转配合衔接,所述动力机构左端内侧与前主动轮旋转配合衔接,所述动力机构左端内侧与前主动轮旋转配合衔接,所述前主动轮可旋转的贯穿对称设置的前轮板,所述前轮板左端内侧与前从动轮旋转配合衔接,本发明装置结构简单,使用方便,采用不同的灵活机构