
控制系统的状态空间设计.pptx

骑着****猪猪

1/10
2/10
3/10

4/10

5/10
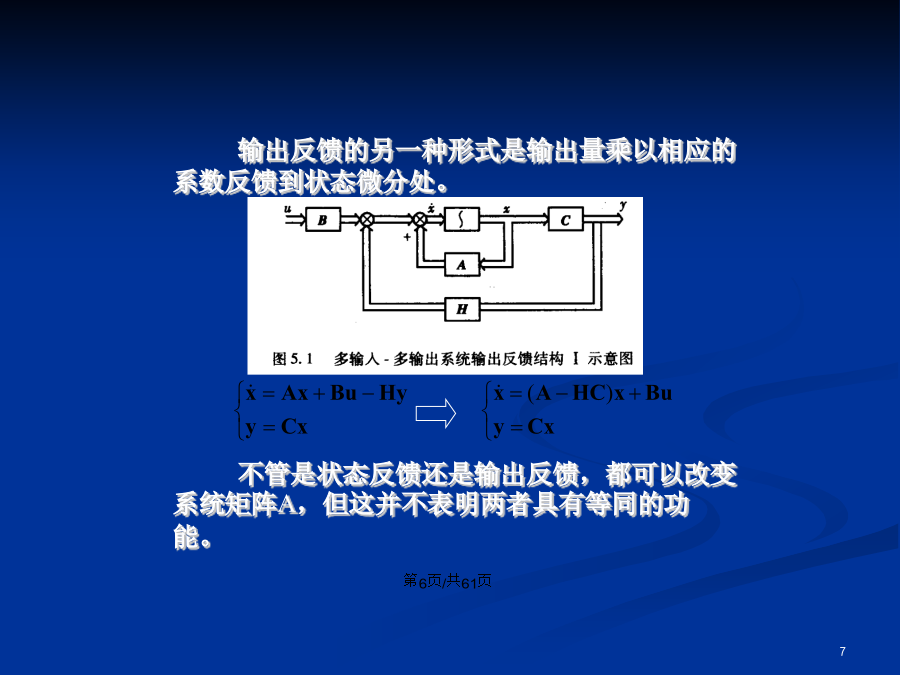
6/10
7/10
8/10
9/10
10/10
亲,该文档总共61页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

控制系统的状态空间设计.pptx
会计学2345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152535455565758596061
基于状态空间模型的控制系统设计.ppt
第五章基于状态窨模型的控制系统设计5.1概述优化型指标则是一类极值型的指标,设计目标是要使性能指标在所有可能值中取得极小(或极大)值;5.2极点配置5.2.1单输入系统的极点配置Ackermann算法:状态反馈阵为令,,于是,对于给定,可以求出pitian()函数的调用格式:5.2.3用极点配置设计调节系统解:1、将给定的的值代入上式,得到:5.2.4用极点配置设计伺服系统pp_sifuI()函数的调用格式为:[K,x_ss,y_ss,u_ss]=pp_sifuI(A,b,c,p,v)假定:r=m=1;前
第4章控制系统的状态空间设计.ppt
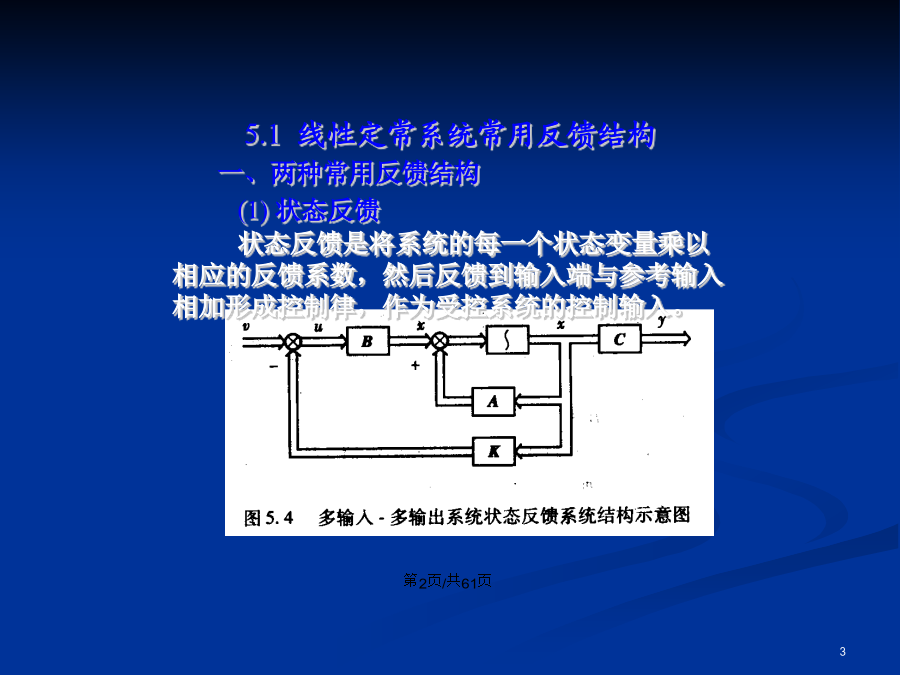
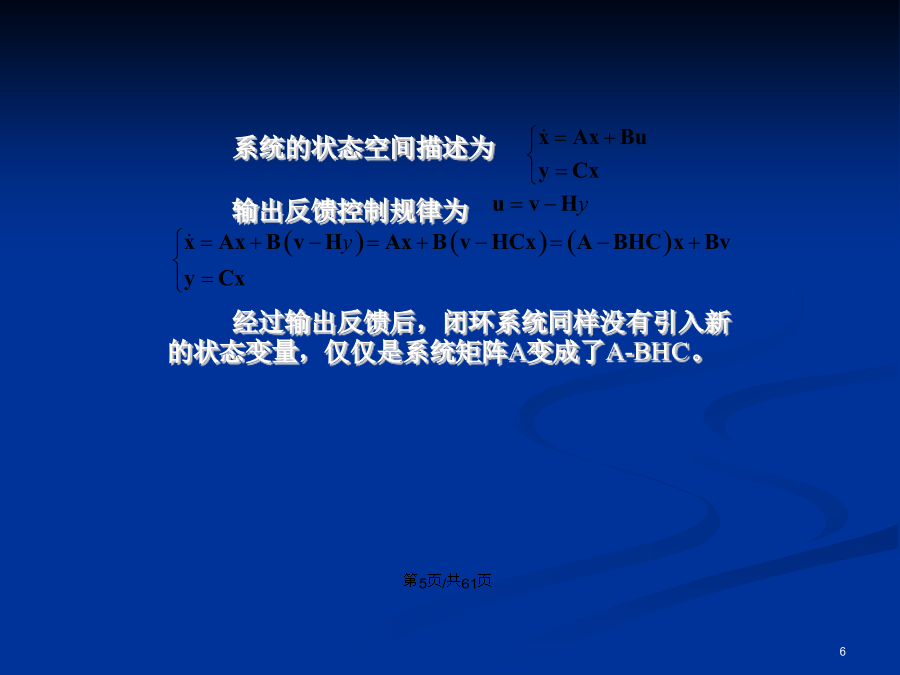
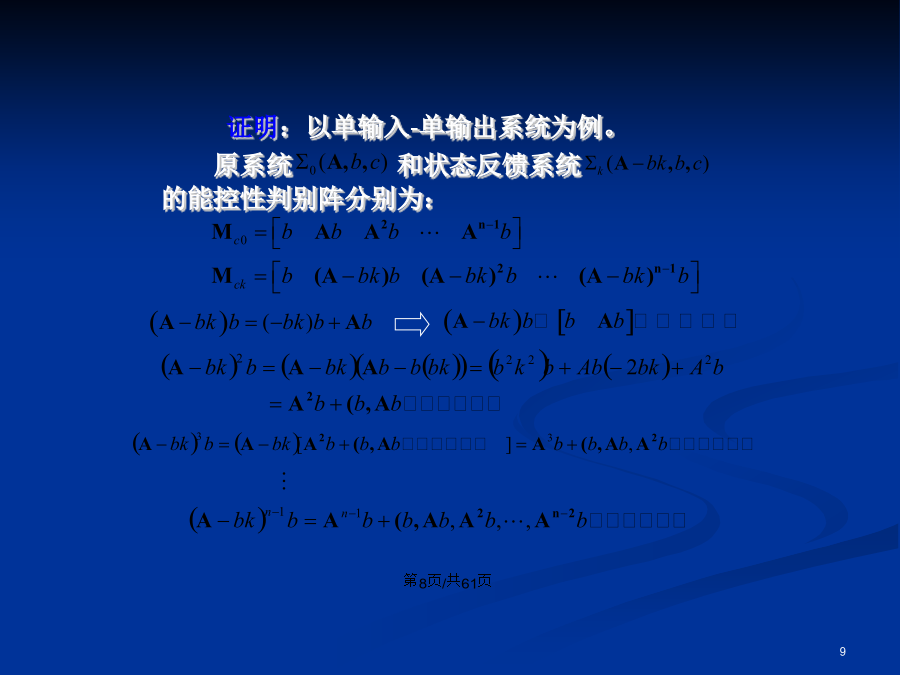
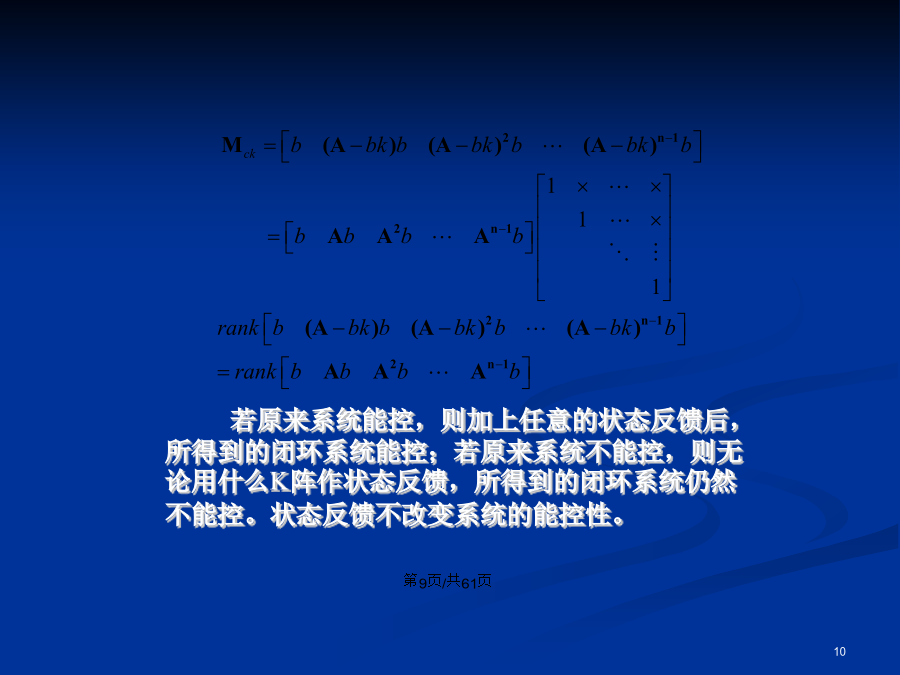
第5章控制系统的状态空间设计—状态反馈及观测器的设计5.1线性定常系统常用反馈结构及其对系统性能的影响5.2状态反馈系统的极点配置5.3状态观测器的设计5.4带观测器的状态反馈系统的综合一.两种常用反馈结构(1)状态反馈以单输入-单输出系统为例,其状态空间描述为:(2)输出反馈输出反馈控制规律为不管是状态反馈还是输出反馈,都可以改变系统矩阵A,但这并不表明两者具有等同的功能。(1)对系统能控性、能观测性的影响证明:为简单起见,以单输入-单输出系统为例。表明,若原来系统能控,则加上任意的状态反馈后,所得到的

单倒置摆控制系统的状态空间设计.doc
现代控制理论基础期中作业题目:单倒置摆控制系统的状态空间设计及MATLAB仿真2012年5月11日单倒立摆控制系统的状态空间设计和仿真摘要倒立摆是研究控制理论的典型实验平台。由于倒立摆系统本身所具有的不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。控制器的设计是倒立摆系统的核心内容,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定,并且可以承受一定的干扰,设计状态反馈控制器的方法进行系统性能的改良,使满足一定的性能的指标。Ab

单倒置摆控制系统的状态空间设计.doc
单倒置摆控制系统的状态空间设计摘要20世纪60年代随着电子计算机技术的进步,航空航天技术和综合自动化发展的需要,推动了以状态空间描述为基础、最优控制为核心,主要在时域研究多输入输出的现代控制理论的诞生。卡尔曼、贝尔曼和庞特里亚金等倡导从变化后的频域回到时域,用状态空间表达式建立MIMO线性/非线性、定常/时变系统的动态数学模型,并提出与经典控制理论频域法不同的状态反馈和最优控制方法,即现代控制理论。在控制理论发展的过程中,某一理论的正确性及在实际应用中的可行性需要一个按其理论设计的控制器去控制一个典型对象