
基于状态空间模型的控制系统设计.ppt

你的****书屋

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于状态空间模型的控制系统设计.ppt
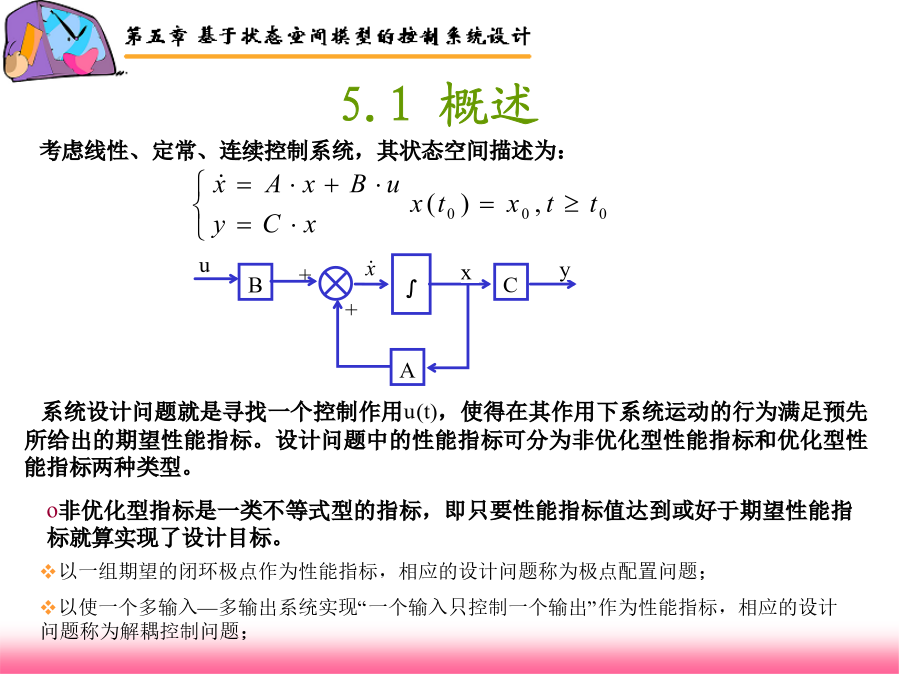
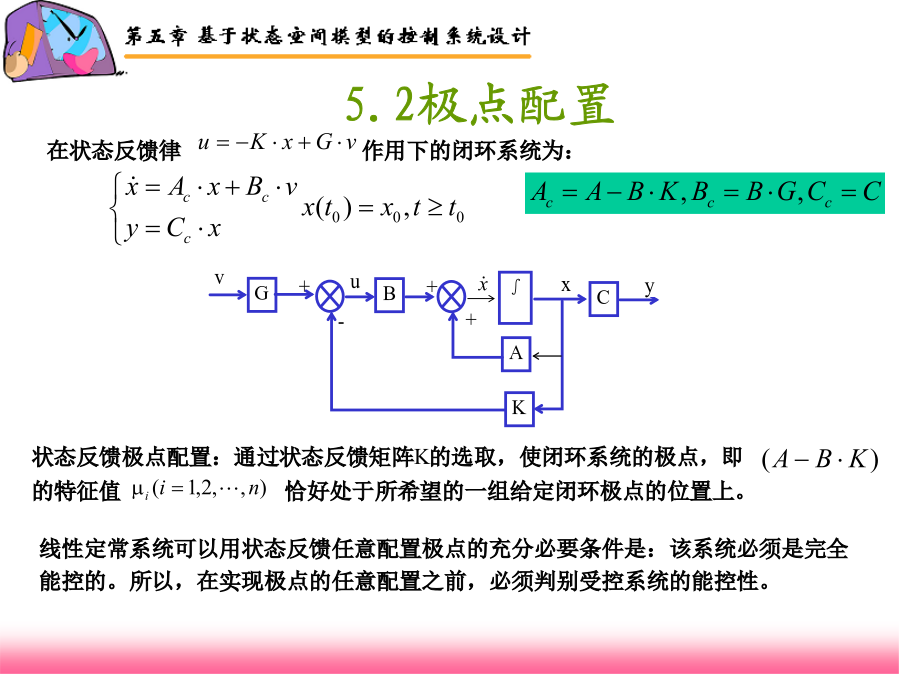
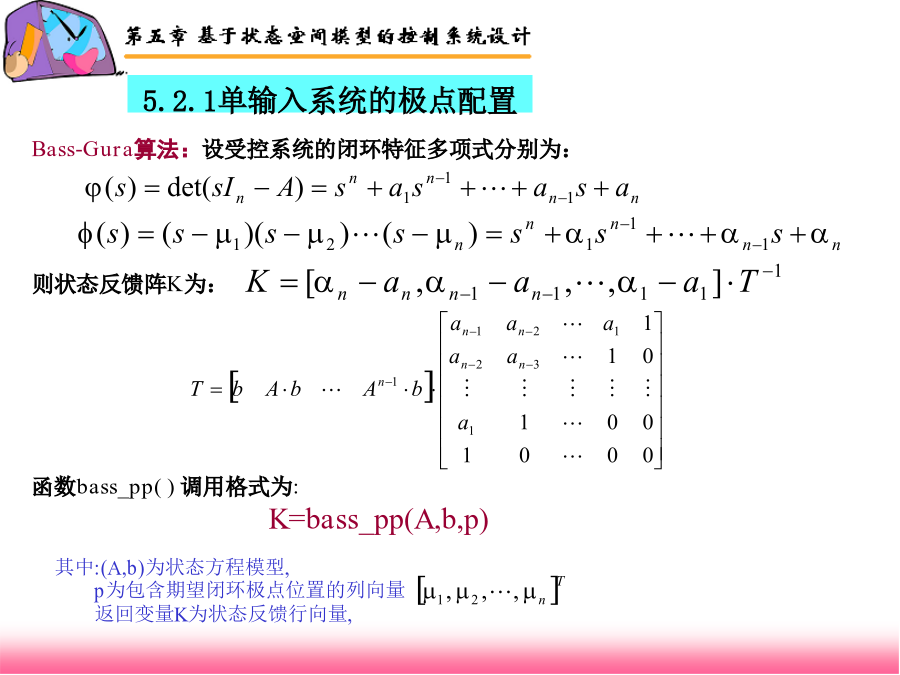
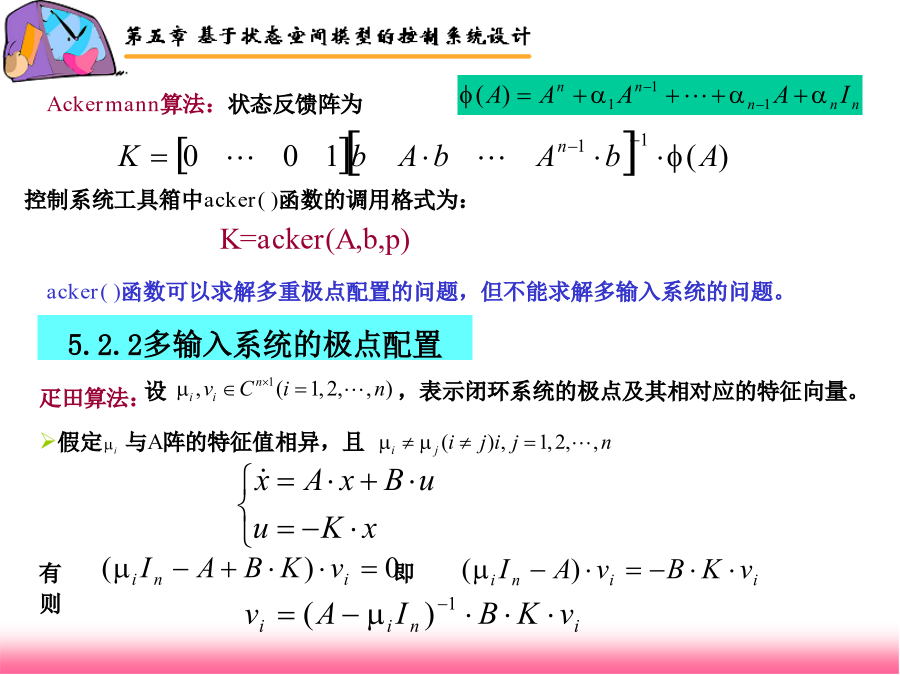
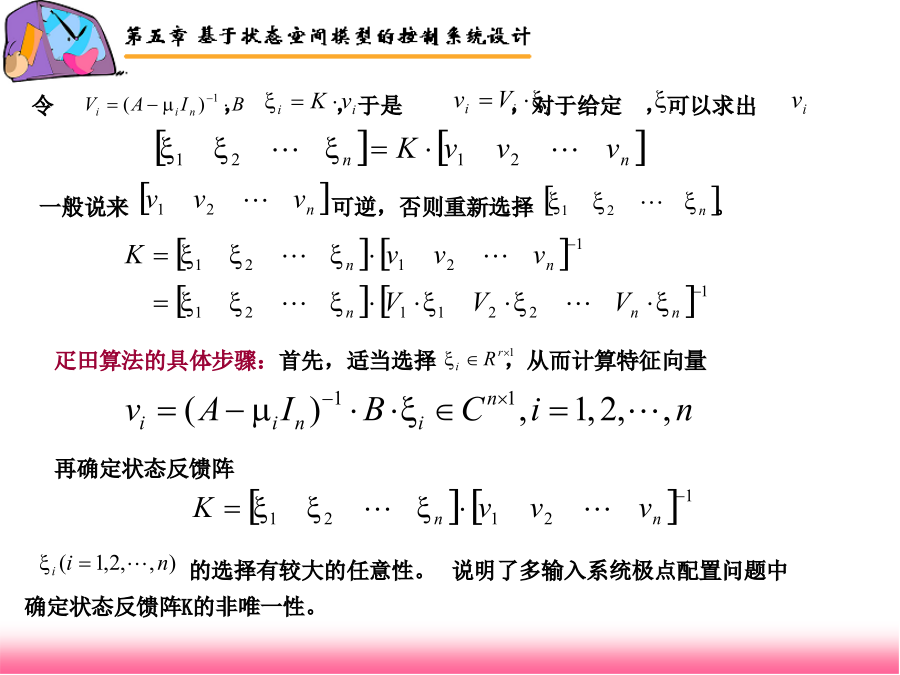
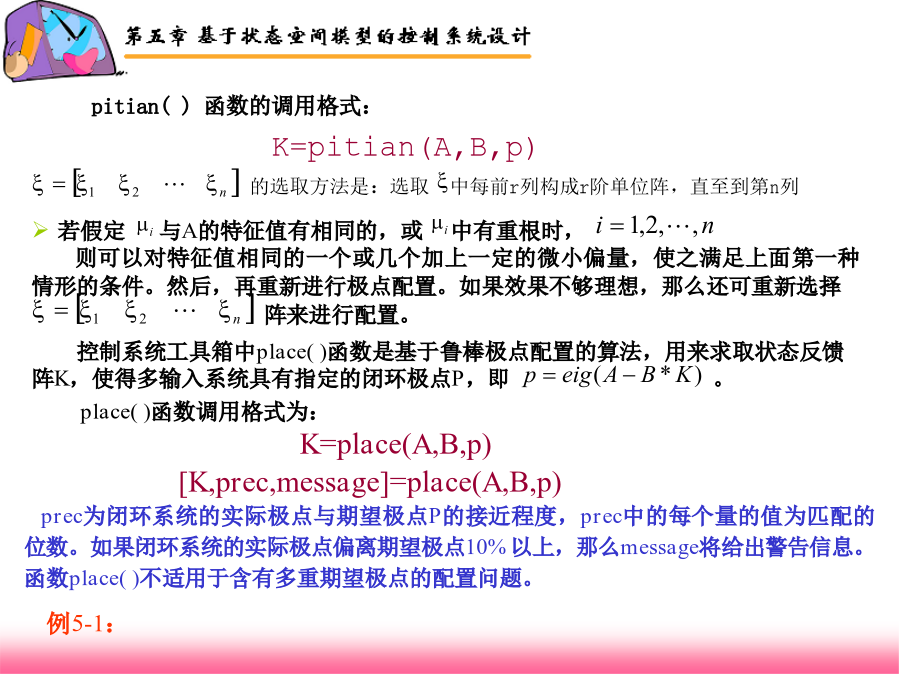
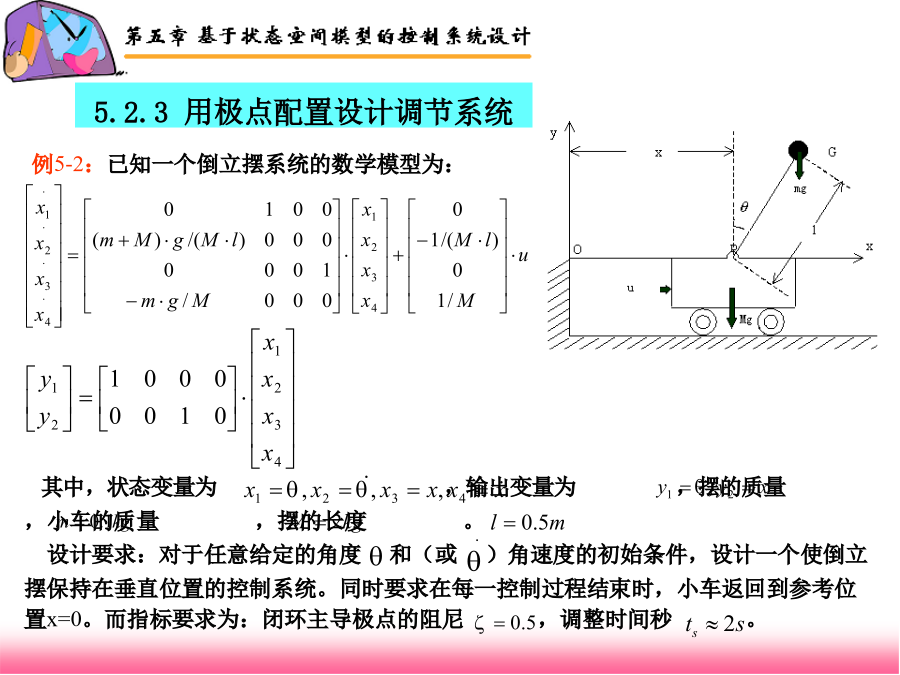
第五章基于状态窨模型的控制系统设计5.1概述优化型指标则是一类极值型的指标,设计目标是要使性能指标在所有可能值中取得极小(或极大)值;5.2极点配置5.2.1单输入系统的极点配置Ackermann算法:状态反馈阵为令,,于是,对于给定,可以求出pitian()函数的调用格式:5.2.3用极点配置设计调节系统解:1、将给定的的值代入上式,得到:5.2.4用极点配置设计伺服系统pp_sifuI()函数的调用格式为:[K,x_ss,y_ss,u_ss]=pp_sifuI(A,b,c,p,v)假定:r=m=1;前

控制系统的状态空间模型.docx
第一章控制系统的状态空间模型1.1引言工程系统正朝着更加复杂的方向发展,这主要是由于复杂的任务和高精度的要求所引起的。一个复杂系统可能有多个输入和多个输出,并且以某种方式相互关联或耦合,可能是时变的。由于需要满足控制系统性能提出的日益严格的要求,系统的复杂程度越来越大,为了分析这样的系统,必须简化其数学表达式,转而借助于计算机来进行各种大量而乏味的分析与计算,并且要求能够方便地用大型计算机对系统进行处理。从这个观点来看,状态空间法对于系统分析是最适宜的。大约从1960年升始发展起来。这种新方法是建立在状态

控制系统的状态空间模型 (2).doc
《现代控制理论》(下部)第一章第一章控制系统的状态空间模型1.1引言工程系统正朝着更加复杂的方向发展,这主要是由于复杂的任务和高精度的要求所引起的。一个复杂系统可能有多个输入和多个输出,并且以某种方式相互关联或耦合,可能是时变的。由于需要满足控制系统性能提出的日益严格的要求,系统的复杂程度越来越大,为了分析这样的系统,必须简化其数学表达式,转而借助于计算机来进行各种大量而乏味的分析与计算,并且要求能够方便地用大型计算机对系统进行处理。从这个观点来看,状态空间法对于系统分析
1.控制系统的状态空间模型.pdf
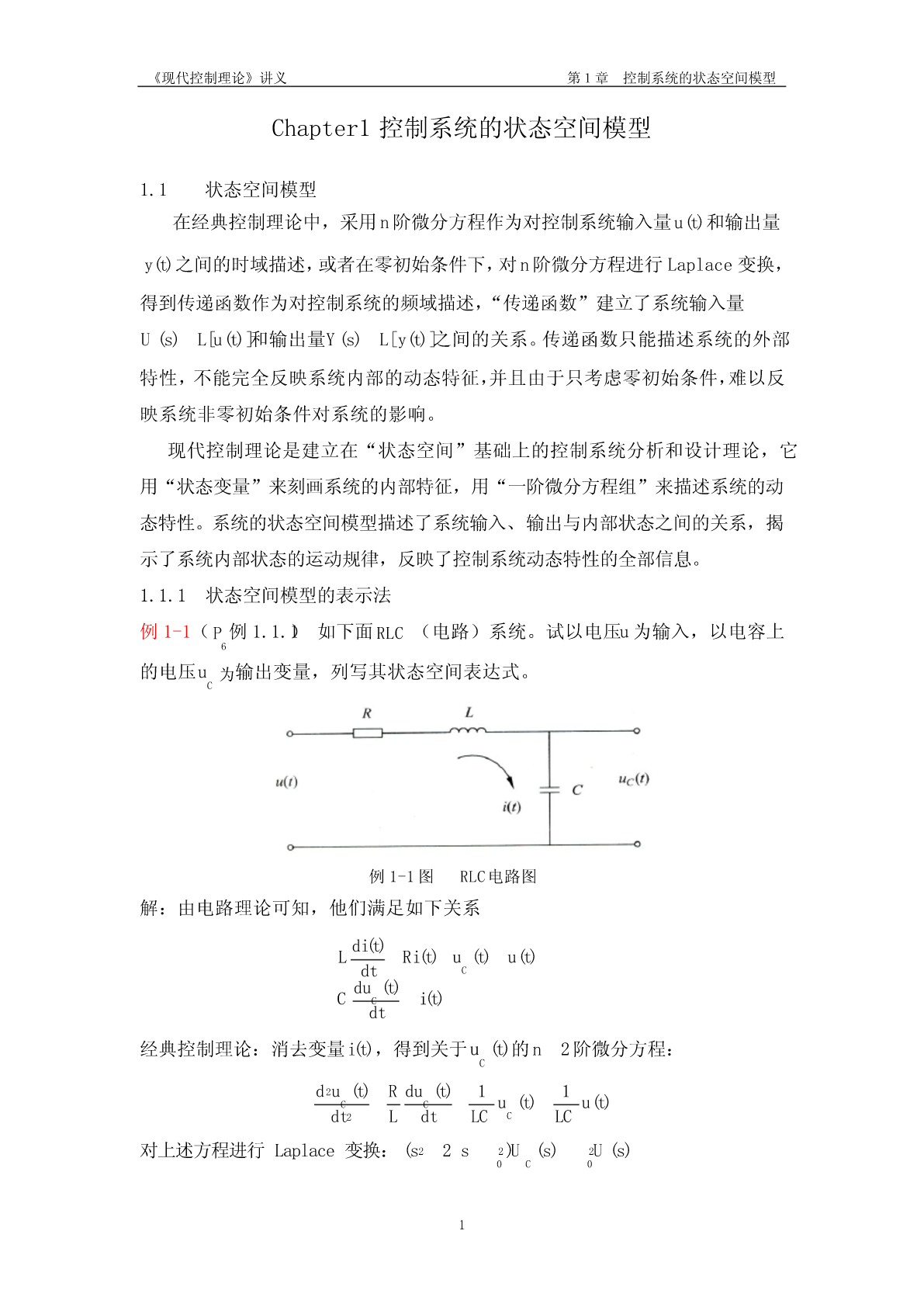
《现代控制理论》讲义第1章控制系统的状态空间模型Chapter1控制系统的状态空间模型1.1状态空间模型在经典控制理论中,采用n阶微分方程作为对控制系统输入量u(t)和输出量y(t)之间的时域描述,或者在零初始条件下,对n阶微分方程进行Laplace变换,得到传递函数作为对控制系统的频域描述,“传递函数”建立了系统输入量U(s)L[u(t)]和输出量Y(s)L[y(t)]之间的关系。传递函数只能描述系统的外部特性,不能完全反映系统内部的动态特征,并且由于只考虑零初始条件,难以反映系统非零初始条件对系统

控制系统的状态空间设计.pptx
会计学2345678910111213141516171819202122232425262728293031323334353637383940414243444546474849505152535455565758596061