
自动导引车动力驱动系统及方法、自动导引车系统.pdf

涵蓄****09


1/9

2/9
3/9
4/9
5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自动导引车动力驱动系统及方法、自动导引车系统.pdf
本发明提供了一种自动导引车动力驱动系统及方法、自动导引车系统。用于自动导引车的驱动轮动力调节控制,所述自动导引车动力驱动系统包括检测单元,驱动单元和计算单元,其中:所述检测单元用于测量每个驱动轮负载压力值,并将所述每个驱动轮负载压力值发送给计算单元,所述驱动单元分别为每个所述驱动轮提供动力;所述计算单元根据所述每个驱动轮负载压力值的差异获得驱动单元分别对每个所述驱动轮动力的补偿值,所述驱动单元根据所述补偿值对相应的所述驱动轮进行补偿使所述驱动轮输出不同的驱动力。本发明精确的补偿压力值偏差造成的功率输出不均
自动导引运输车的导航方法、系统和自动导引运输车.pdf
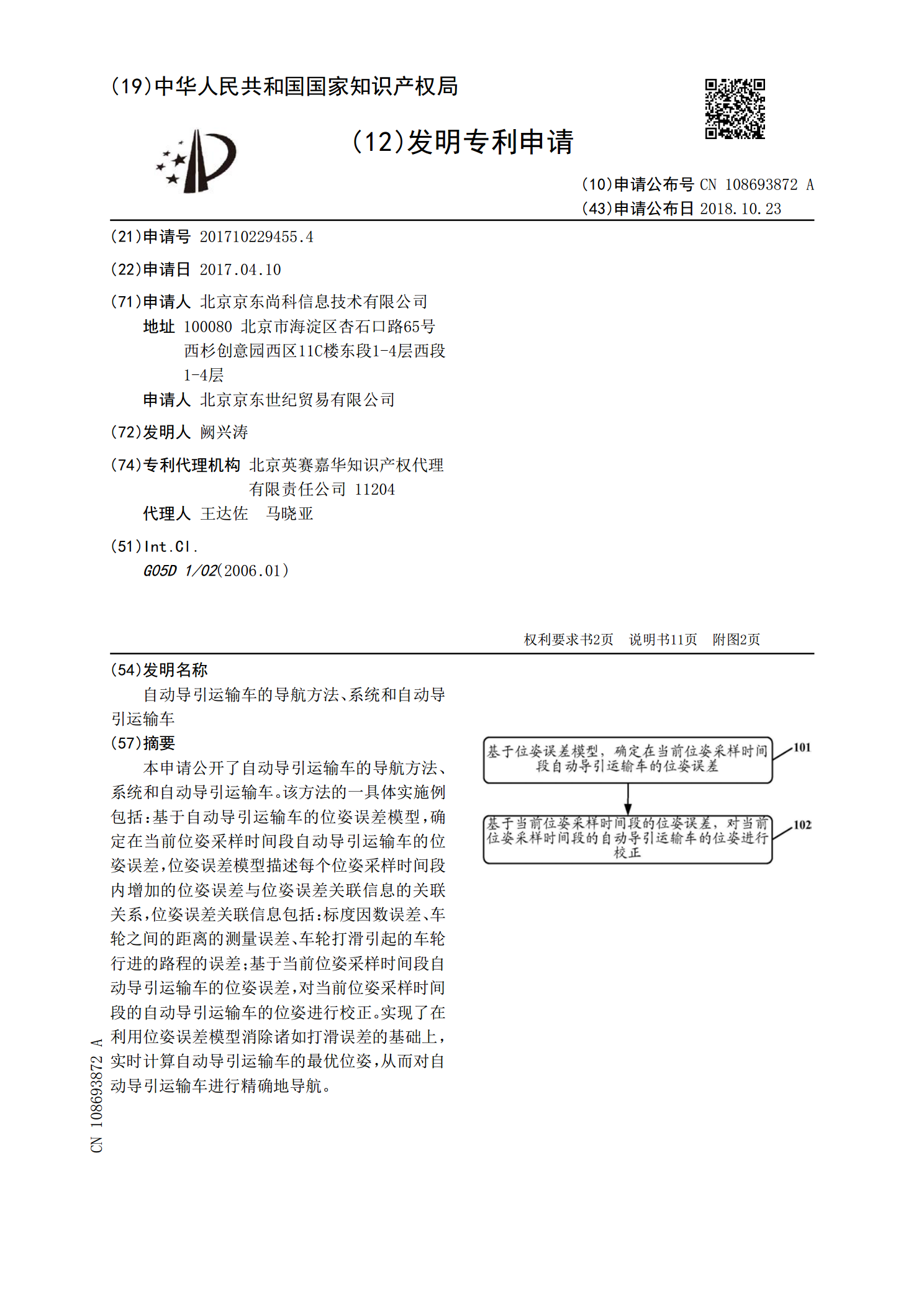
本申请公开了自动导引运输车的导航方法、系统和自动导引运输车。该方法的一具体实施例包括:基于自动导引运输车的位姿误差模型,确定在当前位姿采样时间段自动导引运输车的位姿误差,位姿误差模型描述每个位姿采样时间段内增加的位姿误差与位姿误差关联信息的关联关系,位姿误差关联信息包括:标度因数误差、车轮之间的距离的测量误差、车轮打滑引起的车轮行进的路程的误差;基于当前位姿采样时间段自动导引运输车的位姿误差,对当前位姿采样时间段的自动导引运输车的位姿进行校正。实现了在利用位姿误差模型消除诸如打滑误差的基础上,实时计算自动

自动导引运输车定位方法、定位系统及自动导引运输系统.pdf
本发明公开一种自动导引运输车定位方法、定位系统及自动导引运输系统。本发明根据导航仪的最新采样时间和驱动轮传感器的最新采样时间的大小关系确定导航仪的期望位置。最终获得的导航仪位置的输出频率为驱动轮传感器采样频率与导航仪采样频率之和,由于驱动轮传感器的采样频率远高于导航仪的采样频率,因此,采用本发明提供的定位方法及定位系统能够有效提高AGV导航数据的更新频率,从而提高AGV控制算法频率,进而提高AGV整车控制精度,尤其在高速运动状态下,其优势尤其明显。本发明提供的自动导引运输系统,预测器的输出频率高,能够有效
车轮磨损检测方法及系统、自动导引车系统.pdf
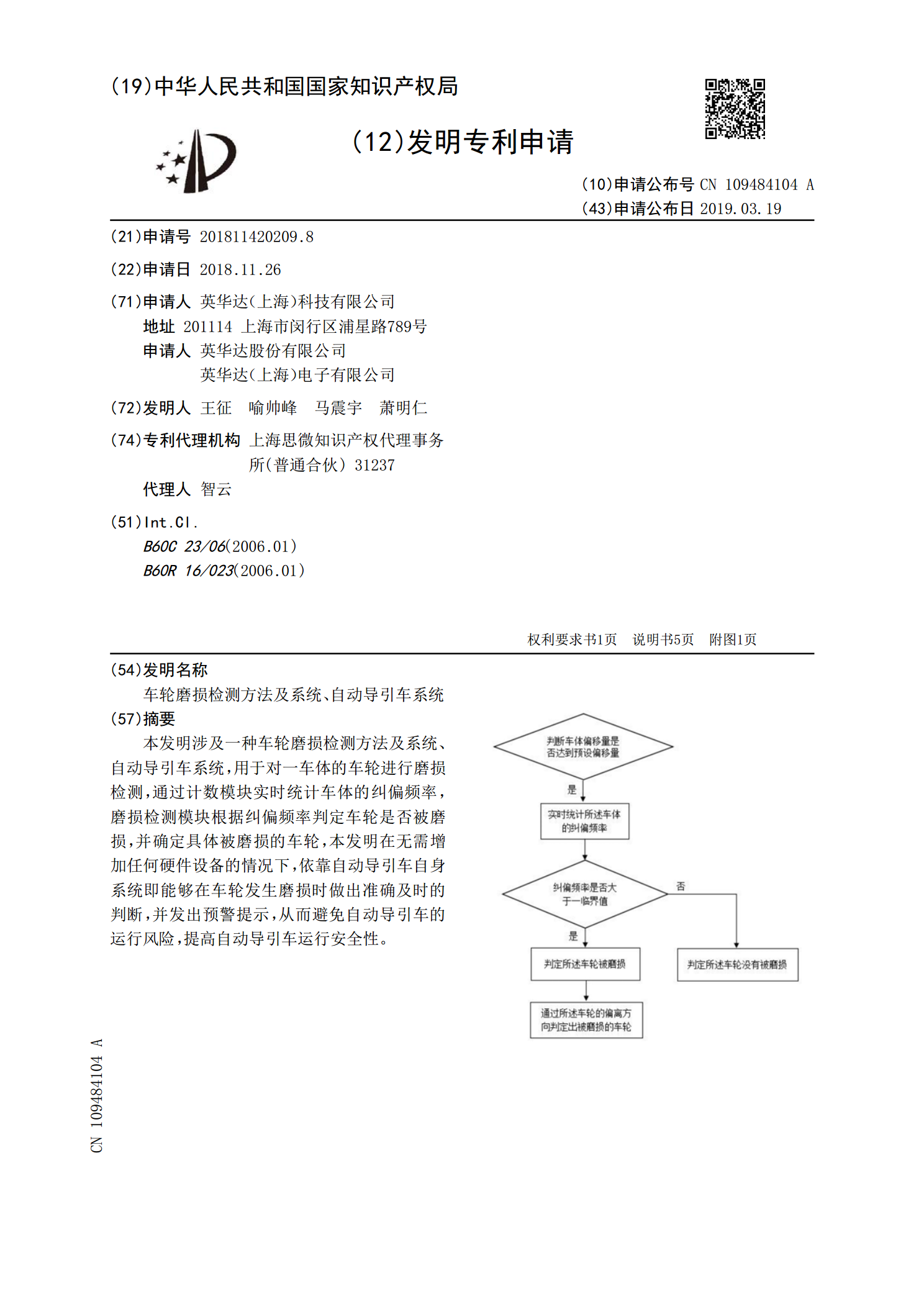
本发明涉及一种车轮磨损检测方法及系统、自动导引车系统,用于对一车体的车轮进行磨损检测,通过计数模块实时统计车体的纠偏频率,磨损检测模块根据纠偏频率判定车轮是否被磨损,并确定具体被磨损的车轮,本发明在无需增加任何硬件设备的情况下,依靠自动导引车自身系统即能够在车轮发生磨损时做出准确及时的判断,并发出预警提示,从而避免自动导引车的运行风险,提高自动导引车运行安全性。
自动导引运输车的控制方法、装置及自动导引运输车.pdf
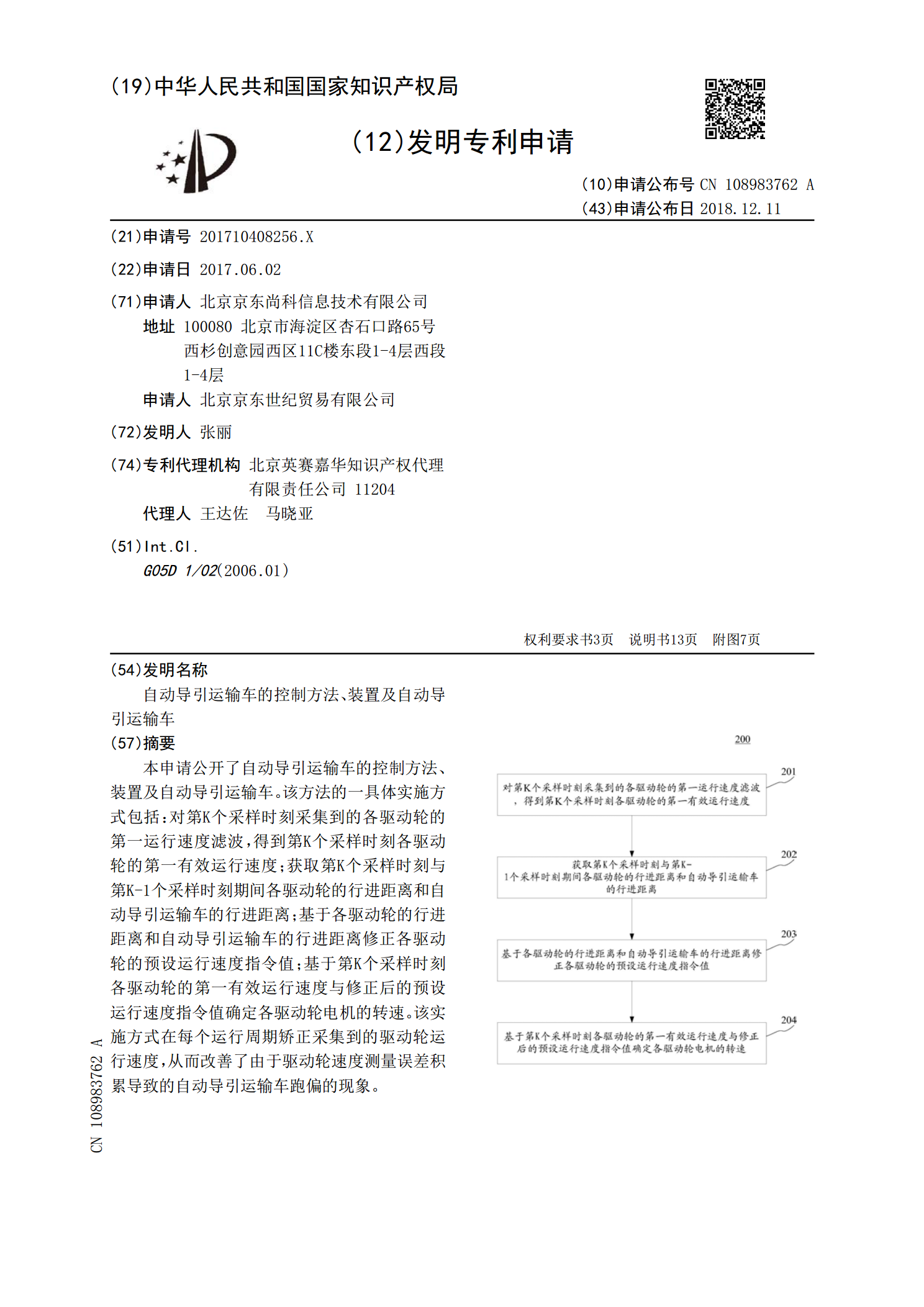
本申请公开了自动导引运输车的控制方法、装置及自动导引运输车。该方法的一具体实施方式包括:对第K个采样时刻采集到的各驱动轮的第一运行速度滤波,得到第K个采样时刻各驱动轮的第一有效运行速度;获取第K个采样时刻与第K‑1个采样时刻期间各驱动轮的行进距离和自动导引运输车的行进距离;基于各驱动轮的行进距离和自动导引运输车的行进距离修正各驱动轮的预设运行速度指令值;基于第K个采样时刻各驱动轮的第一有效运行速度与修正后的预设运行速度指令值确定各驱动轮电机的转速。该实施方式在每个运行周期矫正采集到的驱动轮运行速度,从而改