
机车轮对空转及滑行检测方法及系统.pdf

和裕****az


1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机车轮对空转及滑行检测方法及系统.pdf
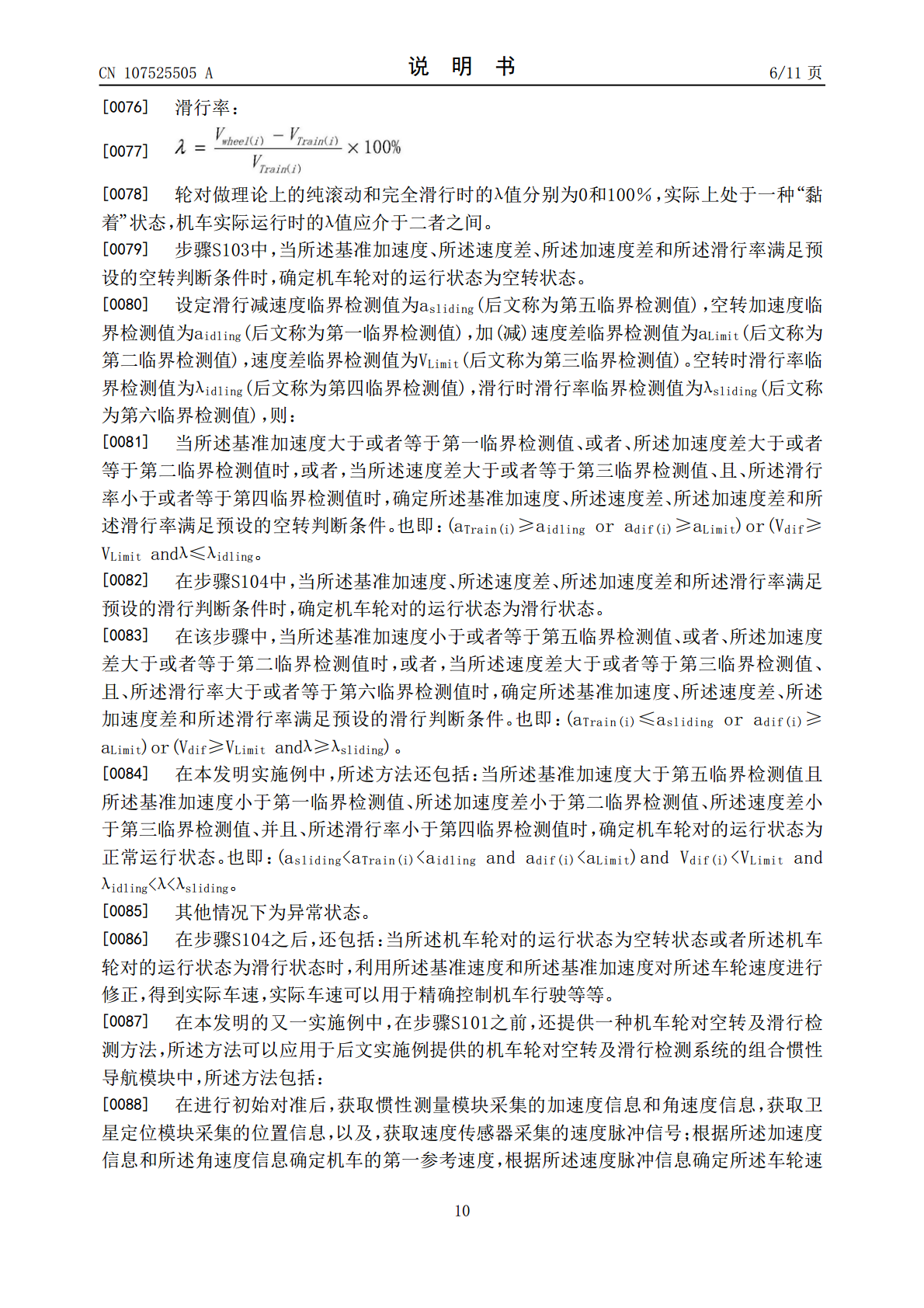
本发明提供了一种机车轮对空转及滑行检测方法及系统,包括:在进行初始对准后,获取组合惯性导航模块输出的基准速度、基准加速度和车轮速度,所述车轮速度是根据速度传感器采集的速度脉冲信息确定的;根据基准速度、基准加速度、车轮速度以及预设公式,计算速度差、加速度差及滑行率;当基准加速度、速度差、加速度差和滑行率满足预设的空转判断条件时,确定机车轮对的运行状态为空转状态;当基准加速度、速度差、加速度差和滑行率满足预设的滑行判断条件时,确定机车轮对的运行状态为滑行状态,达到检测机车轮对是否发生空转和滑行情况,更好地保证

一种机车空转滑行保护控制方法.pdf
一种机车空转滑行保护控制方法,包括以下步骤:实时检测机车轮对加速度当加速度超过保护阈值时,即在时开始卸载力矩,并在卸载过程中不断搜索加速度的峰值,即在时达到峰值,当搜索到峰值时立即停止卸载力矩,此时电机转矩变化率机车轮轨粘着重新恢复,机车轮轨粘着力变化率该发明可以很好地克服现有技术存在的卸载深度过大,不仅使机车牵引力损失过大,影响机车的粘着利用,而且造成机车前后冲击的技术问题。

基于滑移率控制的机车防空转滑行方法.pdf
本发明是一种基于滑移率控制的机车防空转滑行方法,根据机车运行状态生成牵引力(或制动力)控制值VTout;检测机车速度;计算牵引(或制动)滑移率给定值VBref;检测各轴的车轮速度;计算牵引(或制动)滑移率反馈值VBfdb;将VBref及VBfdb送入牵引(或制动)滑移率PID闭环控制器VB,得出VBout;按VBout、VTout二者中最小值控制机车牵引力(制动力)。本发明可实现机车全天候的防滑行防空转控制,既能够最大限度的利用粘着力,又能够有效的防止制动滑行或牵引空转的发生。

浅谈韶山4型电力机车防空转滑行系统.docx
西南交通大学网络教育毕业设计(论文)题目:浅谈韶山4型电力机车防空转滑行系统院系:西南交通大学网络教育学院专业:电气工程及其自动化姓名:杨国指导教师:张文丽西南交通大学网络教育学院院系西南交通大学网络教育学院专业电气工程及其自动化年级2006-11级学号06933712姓名杨国学习中心

浅谈韶山4型电力机车防空转滑行系统.docx
西南交通大学网络教育毕业设计(论文)题目:浅谈韶山4型电力机车防空转滑行系统院系:西南交通大学网络教育学院专业:电气工程及其自动化姓名:杨国指导教师:张文丽西南交通大学网络教育学院院系西南交通大学网络教育学院专业电气工程及其自动化年级2006-11级学号06933712姓名杨国学习中心太原中心指导教师张文丽题目浅谈韶山4型电力机车防空转滑行系统指导教师评语是否同意答辩过程分(满分20)指导教师(签章)评阅人评语评阅人(签章)成绩答辩委员会主任(签章)年月日毕业论文任务书班级2006-11级学