
基于外骨骼的可穿戴式下肢康复机器人结构设计与仿真的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于外骨骼的可穿戴式下肢康复机器人结构设计与仿真的开题报告.docx
基于外骨骼的可穿戴式下肢康复机器人结构设计与仿真的开题报告一、项目背景随着人们生活水平的提高,机器人技术的发展越来越受到人们的关注。现代人越来越注重身体健康,因此康复机器人作为一种新型的医疗设备,被广泛关注和应用。下肢康复机器人可以帮助行动不便的患者恢复行走能力,同时避免低头、挪步造成的背部和关节的压力。这项技术在医学和康复领域一直是研究的热点问题。目前,基于外骨骼的可穿戴式下肢康复机器人成为研究的重点,其具有灵活轻便、可穿戴、有效恢复患者下肢运动等特点。本项目旨在设计一种基于外骨骼的可穿戴式下肢康复机器

基于外骨骼的可穿戴式下肢康复机器人结构设计与仿真的任务书.docx
基于外骨骼的可穿戴式下肢康复机器人结构设计与仿真的任务书任务书一、课题背景随着现代生活压力的逐渐增加,人们面临的身体问题也逐渐增多。其中,下肢骨折和运动障碍等问题成为了较为常见的问题。针对这些问题,需要进行康复治疗以帮助患者恢复行动能力。传统的下肢康复方法被证明效果不佳,而近年来发展起来的智能康复机器人在康复领域中得到了广泛应用。基于外骨骼的可穿戴式下肢康复机器人,可以帮助患者通过适度的机械力帮助进行康复,起到了非常好的效果。该康复机器人不仅能够协助康复治疗人员恢复下肢功能,而且可以通过对康复过程中多项参

穿戴式下肢外骨骼机器人设计与仿真分析的开题报告.docx
穿戴式下肢外骨骼机器人设计与仿真分析的开题报告一、研究背景和意义随着现代医学和科技的不断进步,现代医疗器械的种类也越来越多,其中含有越来越多的高科技。肢体机器人的研究与发展已经成为一种重要的医疗器械发展方向,该技术被广泛应用于残疾人康复和运动控制。下肢外骨骼是一种健康康复技术,它由静态和动态的电子和机械元件,以及外骨骼框架组成。下肢外骨骼旨在提高肢体运动的能力和帮助残疾人恢复正常生活。在这种情况下,穿戴式下肢外骨骼机器人已经成为关注的热点。相比传统的固定式下肢外骨骼,穿戴式下肢外骨骼更加灵活,可以更好地适
一种可穿戴式下肢外骨骼康复及助力机器人.pdf
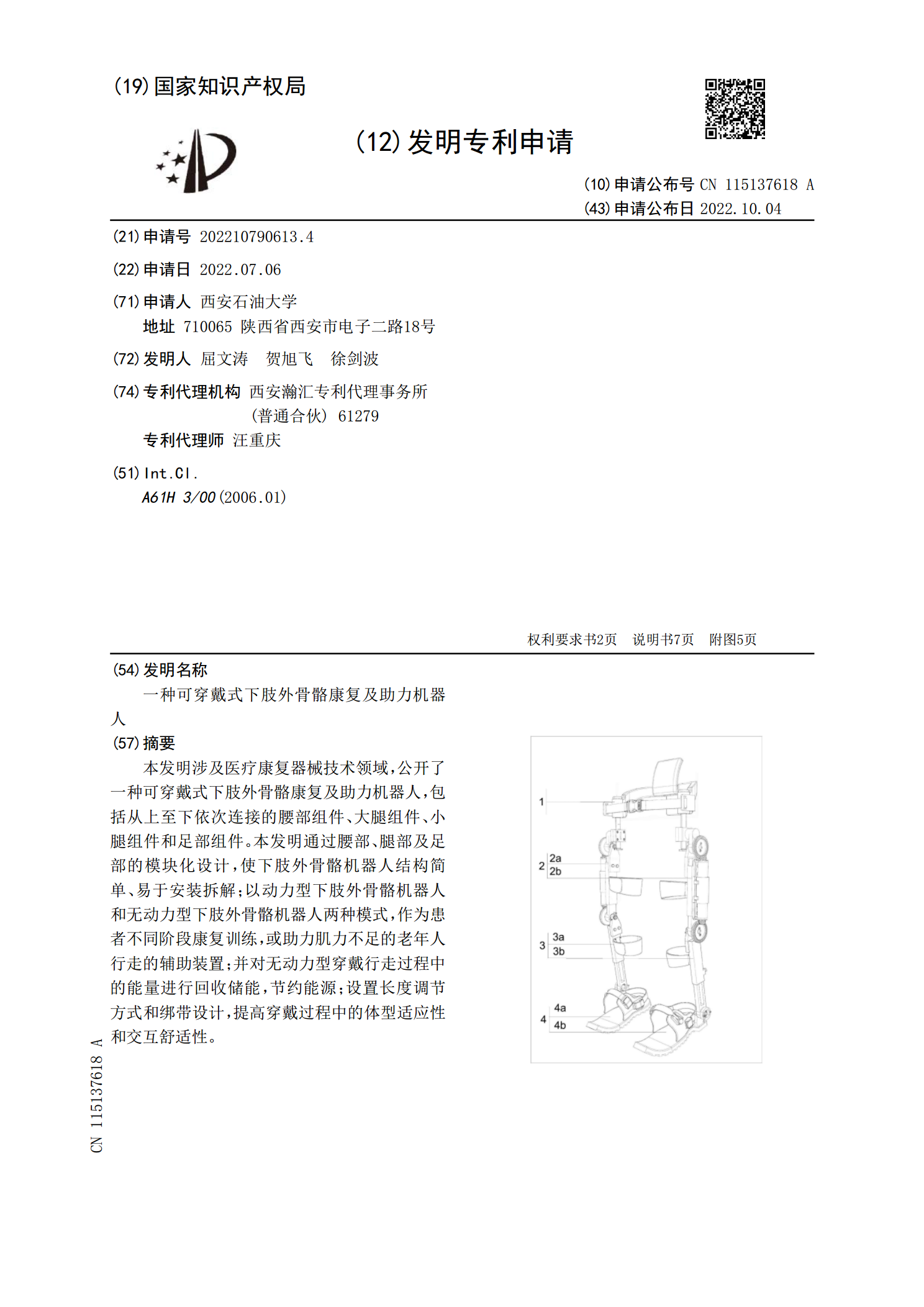
本发明涉及医疗康复器械技术领域,公开了一种可穿戴式下肢外骨骼康复及助力机器人,包括从上至下依次连接的腰部组件、大腿组件、小腿组件和足部组件。本发明通过腰部、腿部及足部的模块化设计,使下肢外骨骼机器人结构简单、易于安装拆解;以动力型下肢外骨骼机器人和无动力型下肢外骨骼机器人两种模式,作为患者不同阶段康复训练,或助力肌力不足的老年人行走的辅助装置;并对无动力型穿戴行走过程中的能量进行回收储能,节约能源;设置长度调节方式和绑带设计,提高穿戴过程中的体型适应性和交互舒适性。

穿戴式下肢康复外骨骼步态与控制策略研究.pptx
穿戴式下肢康复外骨骼步态与控制策略研究目录添加目录项标题研究背景与意义穿戴式下肢康复外骨骼的发展现状步态分析在康复医学中的重要性控制策略对于外骨骼性能的影响穿戴式下肢康复外骨骼系统设计系统总体架构与工作原理关键零部件设计与选型人机交互与安全防护机制步态分析方法与实验验证步态分析方法概述实验设计与参与者信息实验数据采集与处理流程实验结果展示与分析控制策略研究与实现控制策略研究现状与趋势控制算法设计与实现控制策略优化与实验验证控制策略效果评估与对比分析应用前景与展望穿戴式下肢康复外骨骼的应用领域技术创新与市场