
一种机器人手臂.pdf

是你****晨呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种手臂机器人.pdf
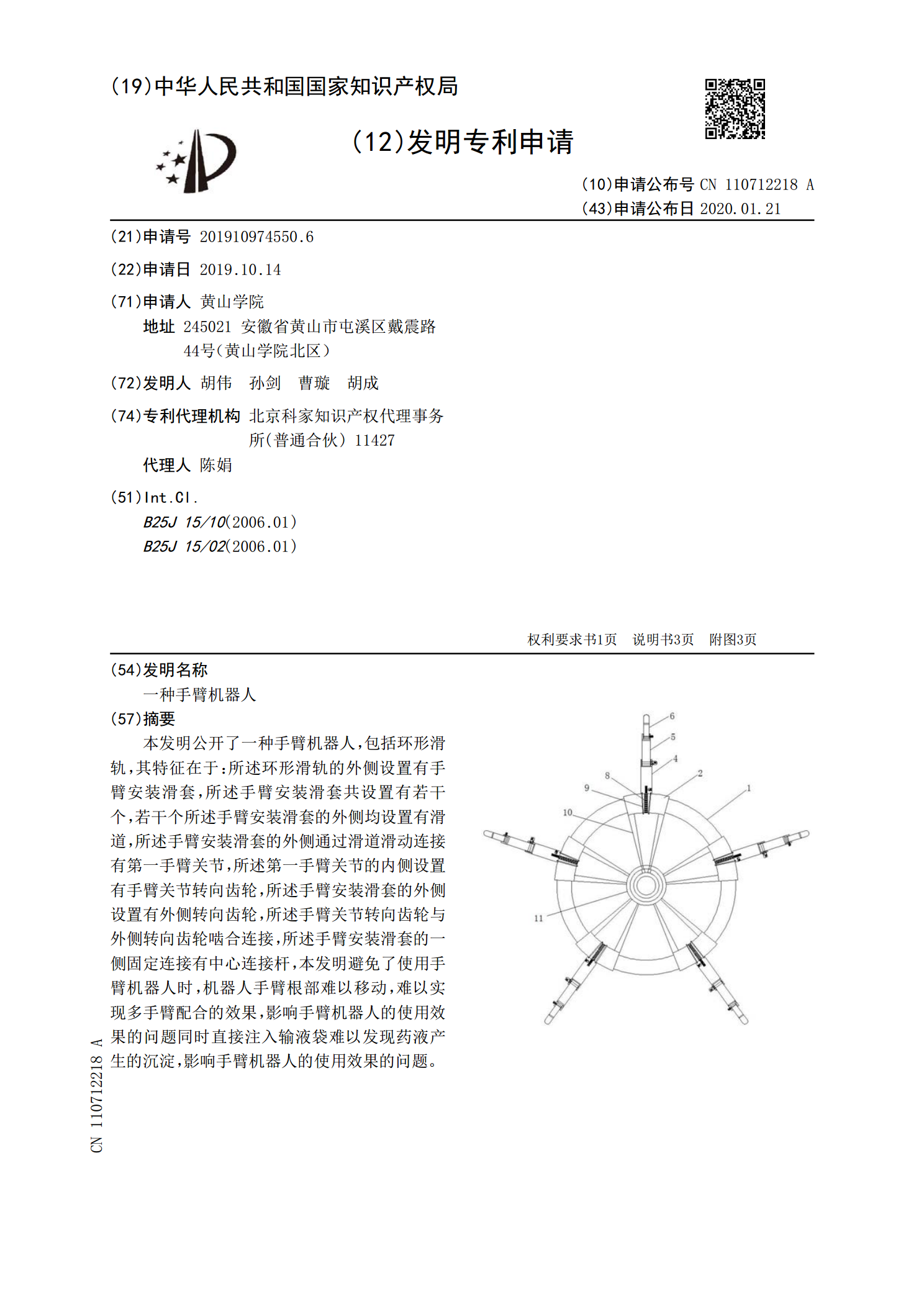
本发明公开了一种手臂机器人,包括环形滑轨,其特征在于:所述环形滑轨的外侧设置有手臂安装滑套,所述手臂安装滑套共设置有若干个,若干个所述手臂安装滑套的外侧均设置有滑道,所述手臂安装滑套的外侧通过滑道滑动连接有第一手臂关节,所述第一手臂关节的内侧设置有手臂关节转向齿轮,所述手臂安装滑套的外侧设置有外侧转向齿轮,所述手臂关节转向齿轮与外侧转向齿轮啮合连接,所述手臂安装滑套的一侧固定连接有中心连接杆,本发明避免了使用手臂机器人时,机器人手臂根部难以移动,难以实现多手臂配合的效果,影响手臂机器人的使用效果的问题同时

一种机器人手臂.pdf
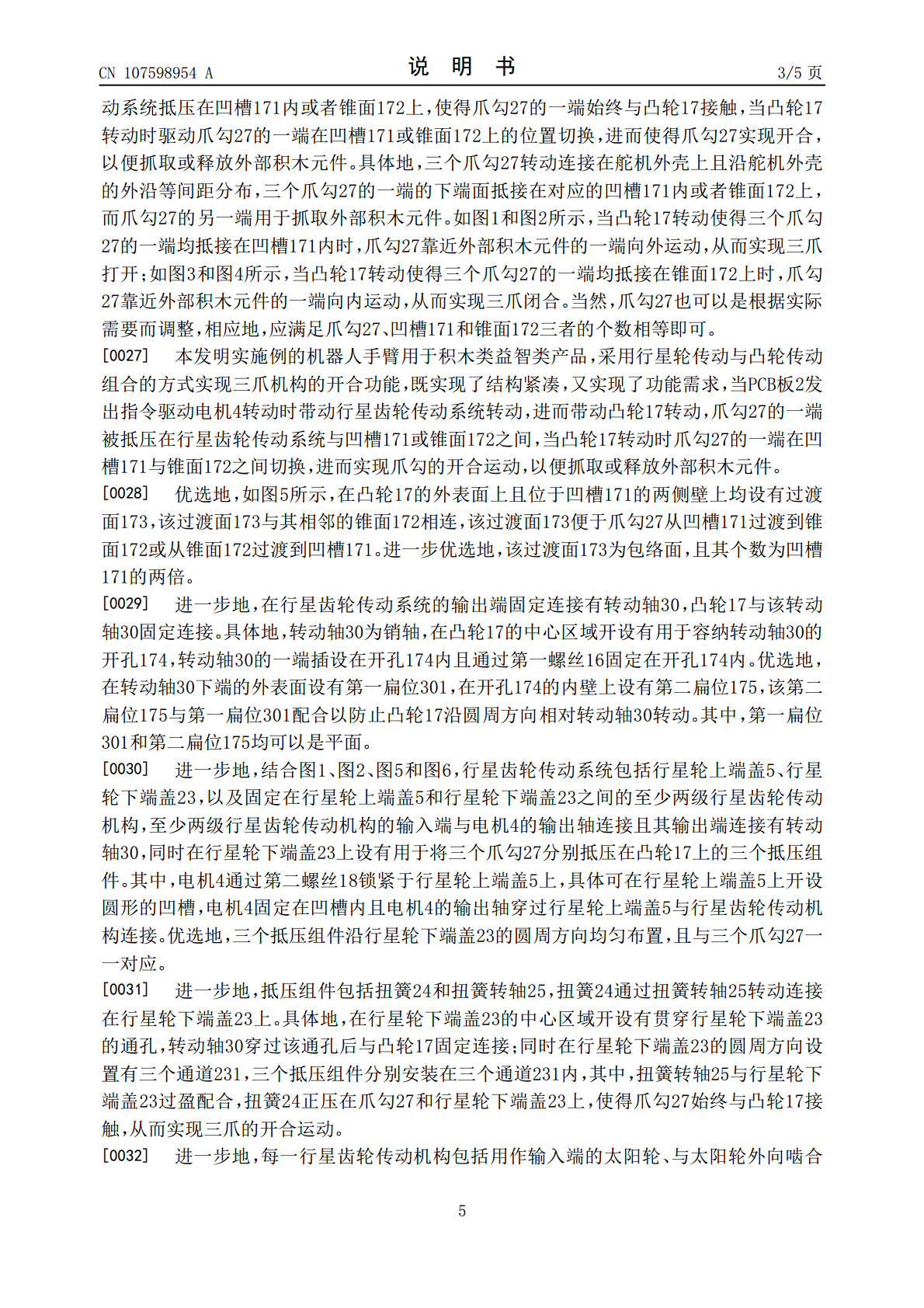
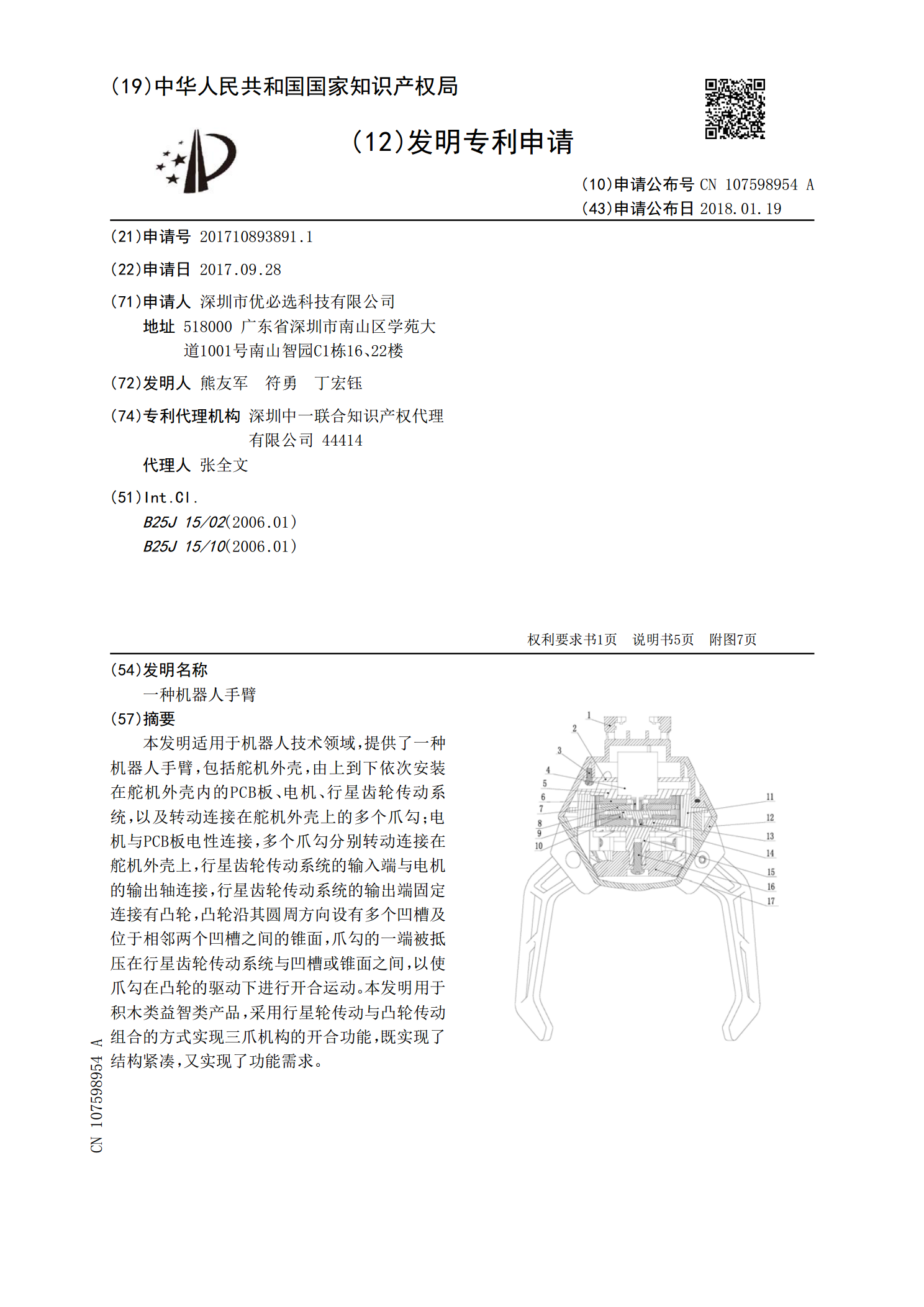
本发明适用于机器人技术领域,提供了一种机器人手臂,包括舵机外壳,由上到下依次安装在所述舵机外壳内的PCB板、电机、行星齿轮传动系统,以及转动连接在所述舵机外壳上的多个爪勾;所述电机与所述PCB板电性连接,所述行星齿轮传动系统的输入端与所述电机的输出轴连接,所述行星齿轮传动系统的输出端设有斜齿轴及与所述斜齿轴和所述爪勾啮合的多个传动斜齿轮,所述传动斜齿轮与所述爪勾一一对应,多个所述爪勾的一端分别转动连接在所述舵机外壳上且用于在所述传动斜齿轮的驱动下进行开合运动。本发明用于积木类益智类产品,采用行星齿轮传动系
一种机器人手臂.pdf
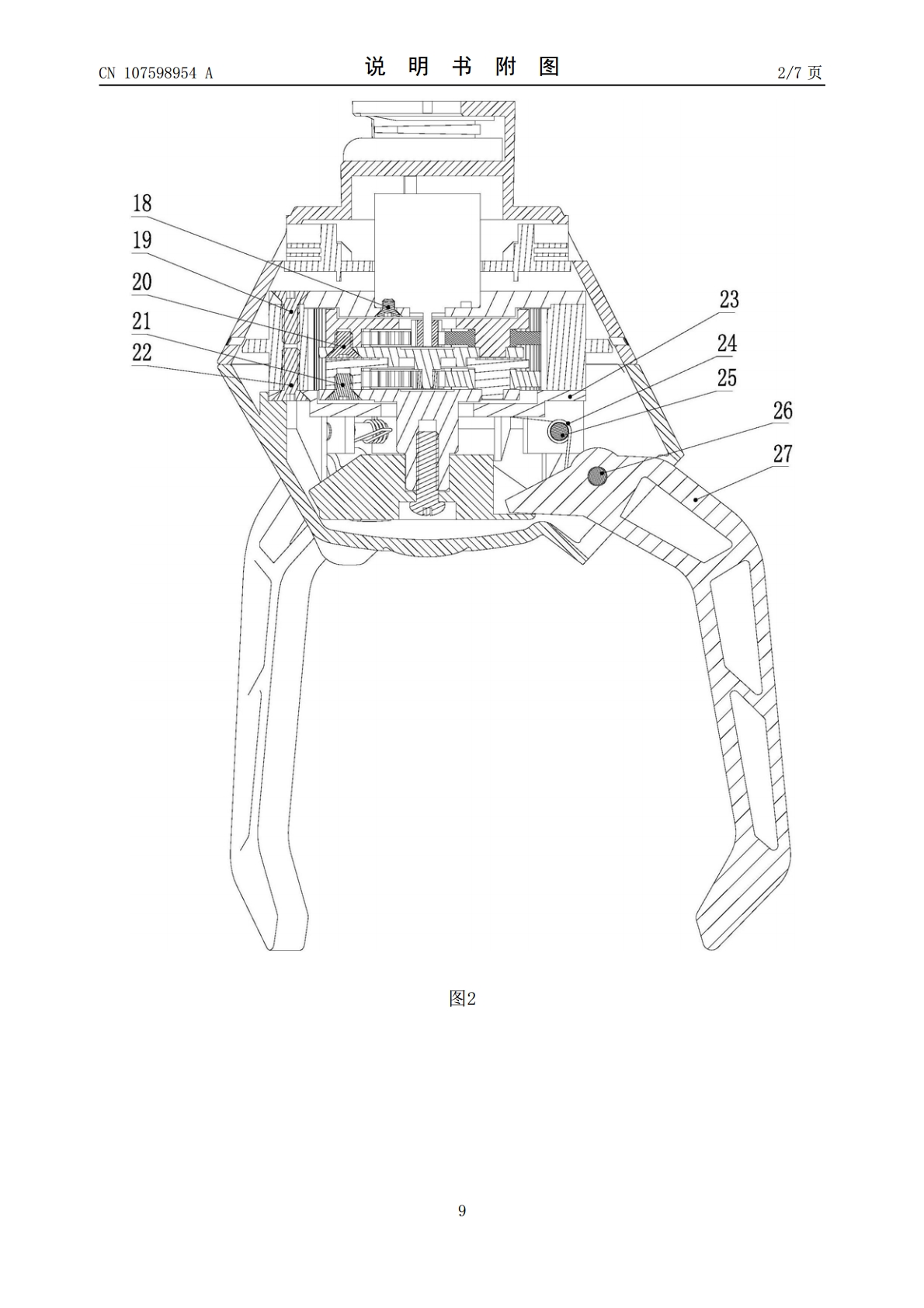
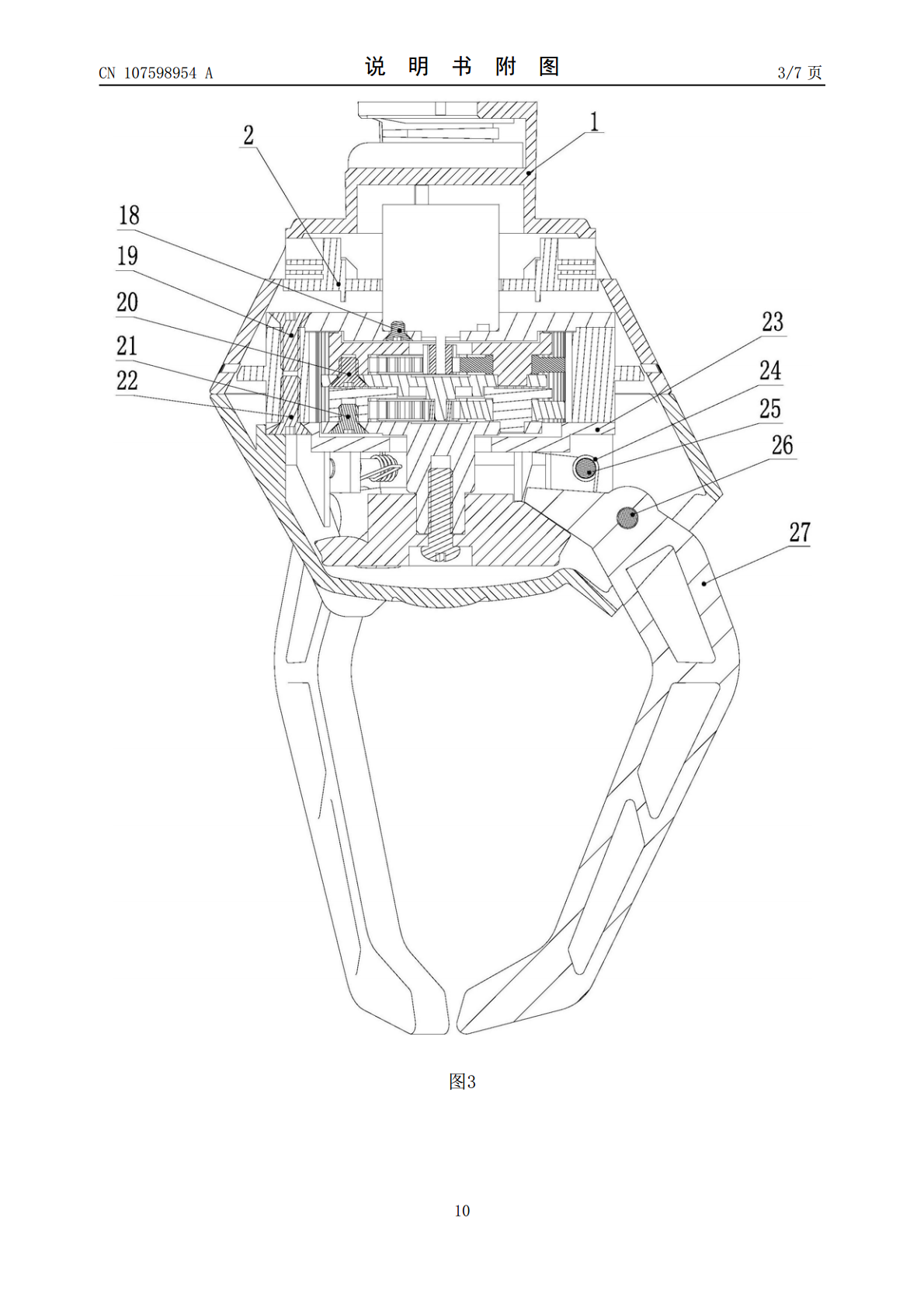
本发明适用于机器人技术领域,提供了一种机器人手臂,包括舵机外壳,由上到下依次安装在舵机外壳内的PCB板、电机、行星齿轮传动系统,以及转动连接在舵机外壳上的多个爪勾;电机与PCB板电性连接,多个爪勾分别转动连接在舵机外壳上,行星齿轮传动系统的输入端与电机的输出轴连接,行星齿轮传动系统的输出端固定连接有凸轮,凸轮沿其圆周方向设有多个凹槽及位于相邻两个凹槽之间的锥面,爪勾的一端被抵压在行星齿轮传动系统与凹槽或锥面之间,以使爪勾在凸轮的驱动下进行开合运动。本发明用于积木类益智类产品,采用行星轮传动与凸轮传动组合的
一种机器人手臂.pdf
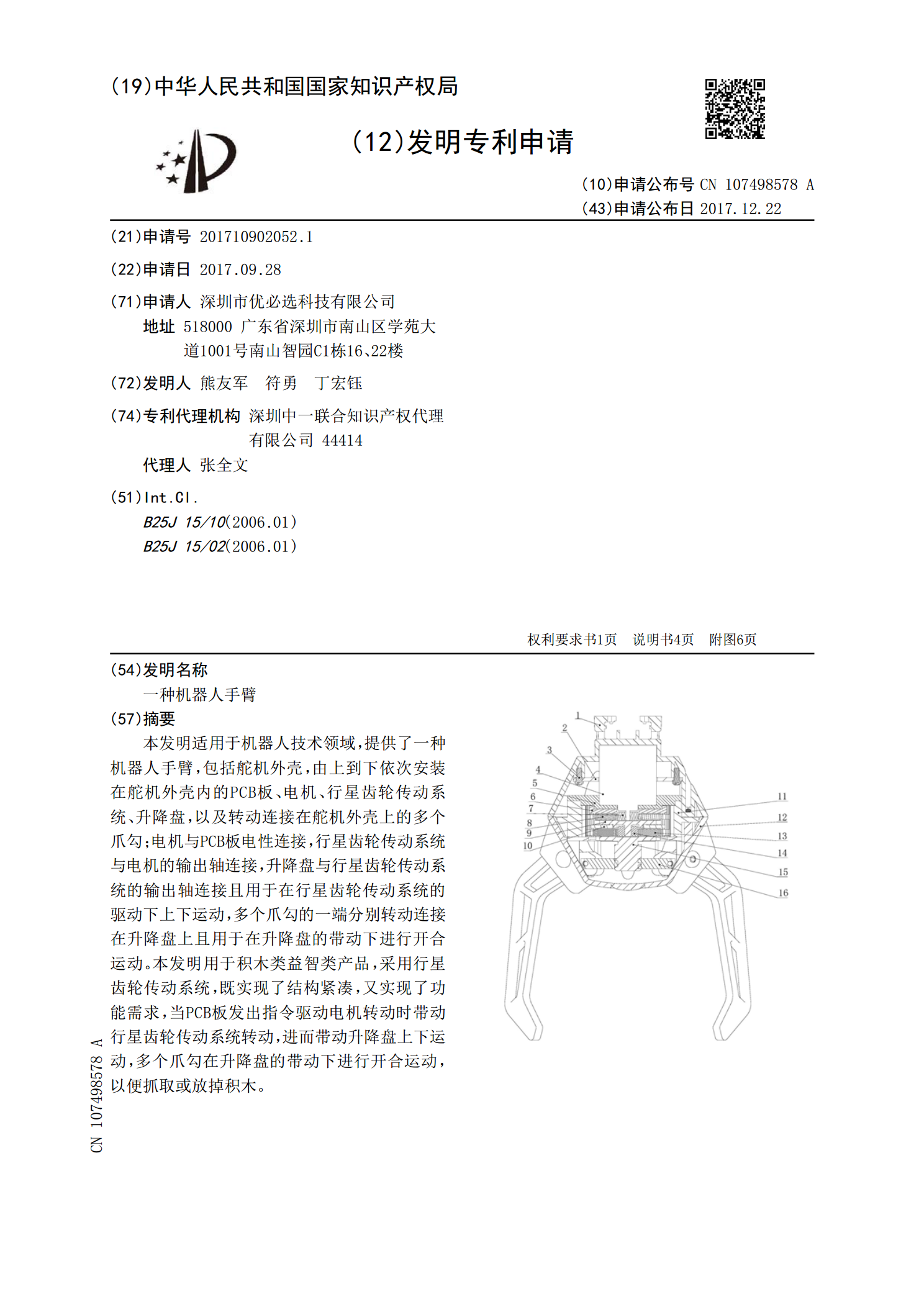
本发明适用于机器人技术领域,提供了一种机器人手臂,包括舵机外壳,由上到下依次安装在舵机外壳内的PCB板、电机、行星齿轮传动系统、升降盘,以及转动连接在舵机外壳上的多个爪勾;电机与PCB板电性连接,行星齿轮传动系统与电机的输出轴连接,升降盘与行星齿轮传动系统的输出轴连接且用于在行星齿轮传动系统的驱动下上下运动,多个爪勾的一端分别转动连接在升降盘上且用于在升降盘的带动下进行开合运动。本发明用于积木类益智类产品,采用行星齿轮传动系统,既实现了结构紧凑,又实现了功能需求,当PCB板发出指令驱动电机转动时带动行星齿
一种机器人手臂.pdf
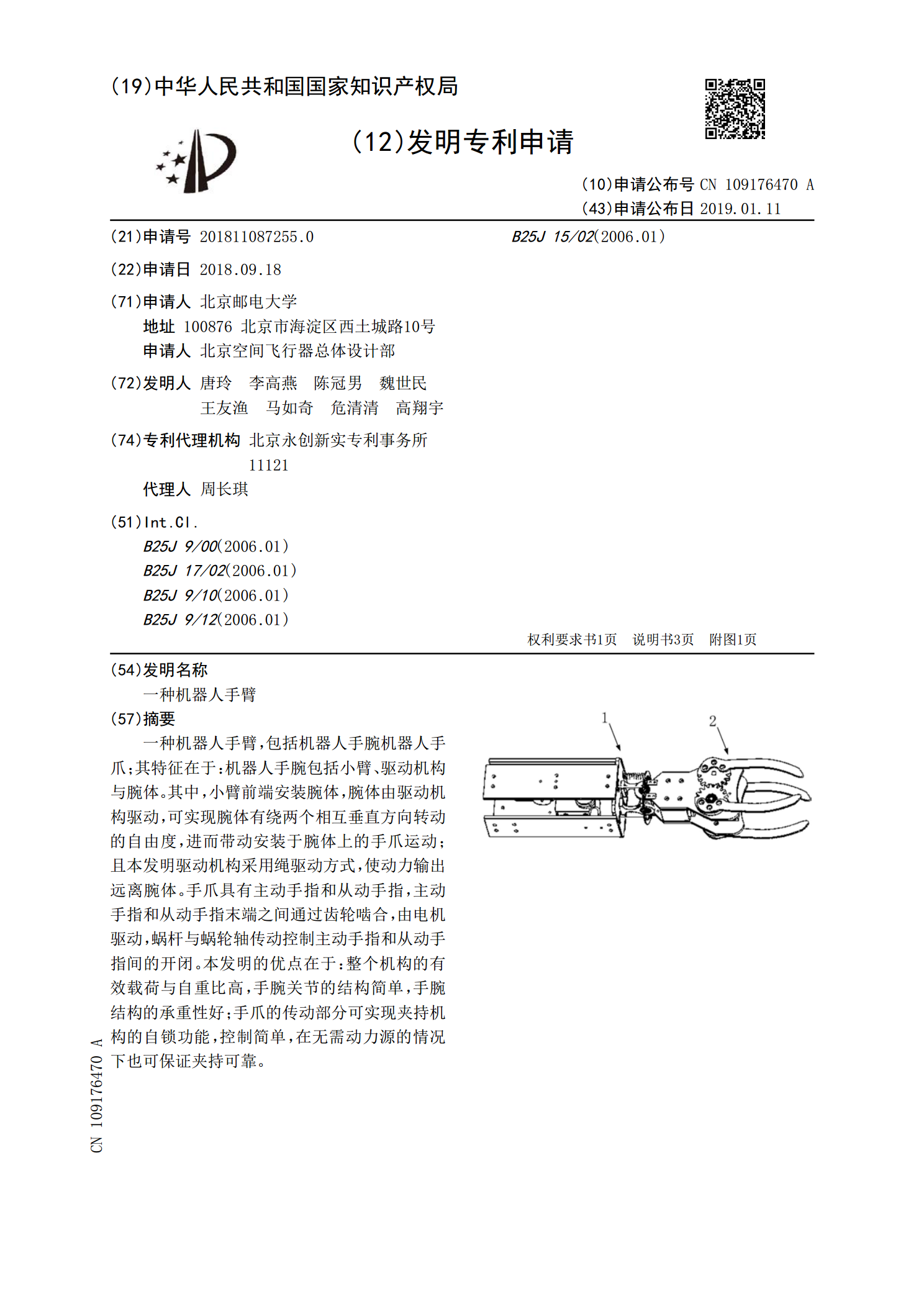
一种机器人手臂,包括机器人手腕机器人手爪;其特征在于:机器人手腕包括小臂、驱动机构与腕体。其中,小臂前端安装腕体,腕体由驱动机构驱动,可实现腕体有绕两个相互垂直方向转动的自由度,进而带动安装于腕体上的手爪运动;且本发明驱动机构采用绳驱动方式,使动力输出远离腕体。手爪具有主动手指和从动手指,主动手指和从动手指末端之间通过齿轮啮合,由电机驱动,蜗杆与蜗轮轴传动控制主动手指和从动手指间的开闭。本发明的优点在于:整个机构的有效载荷与自重比高,手腕关节的结构简单,手腕结构的承重性好;手爪的传动部分可实现夹持机构的自