
防辐射移动机器人非接触无线充电装置及充电方法.pdf

猫巷****觅蓉


1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
防辐射移动机器人非接触无线充电装置及充电方法.pdf
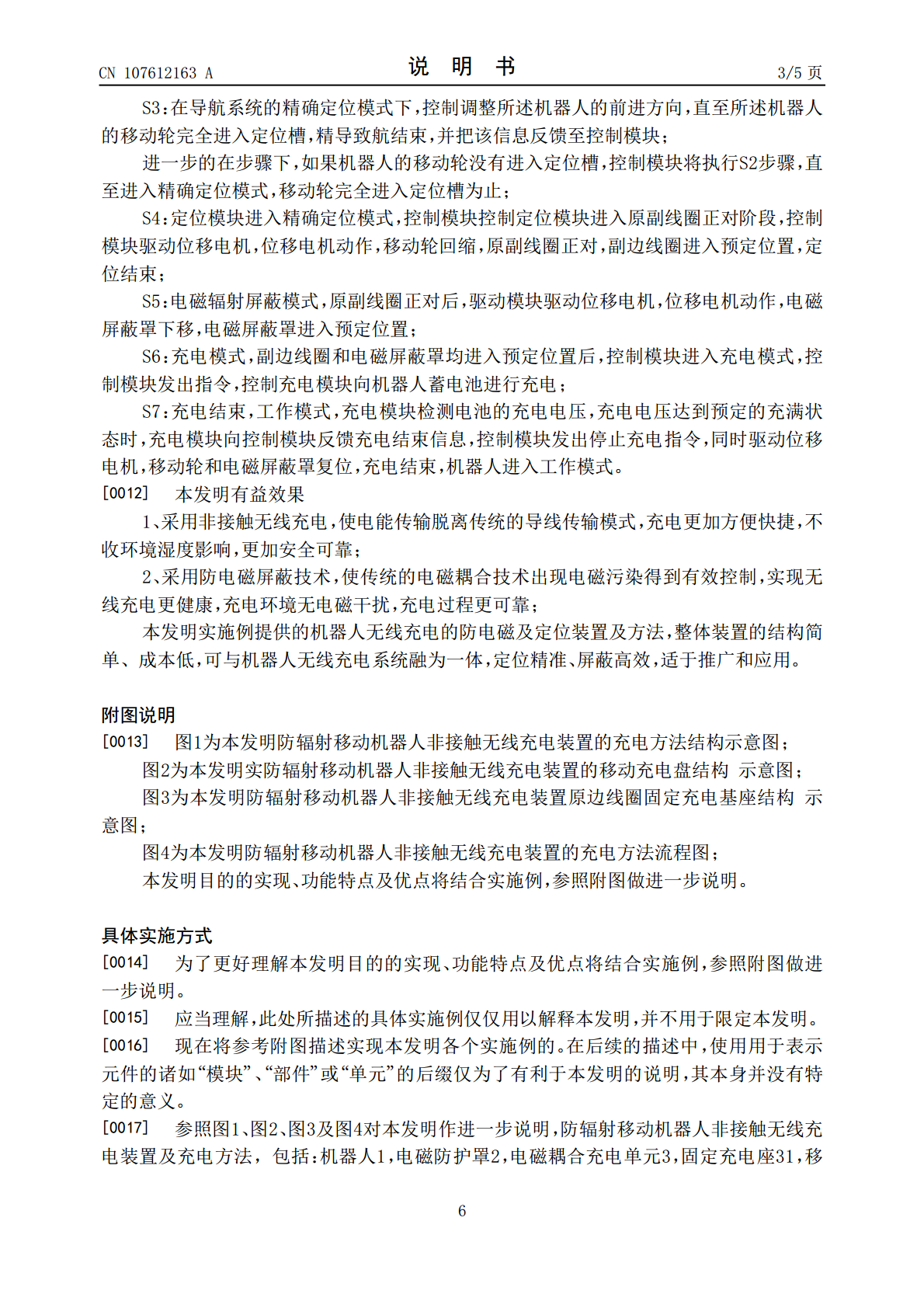
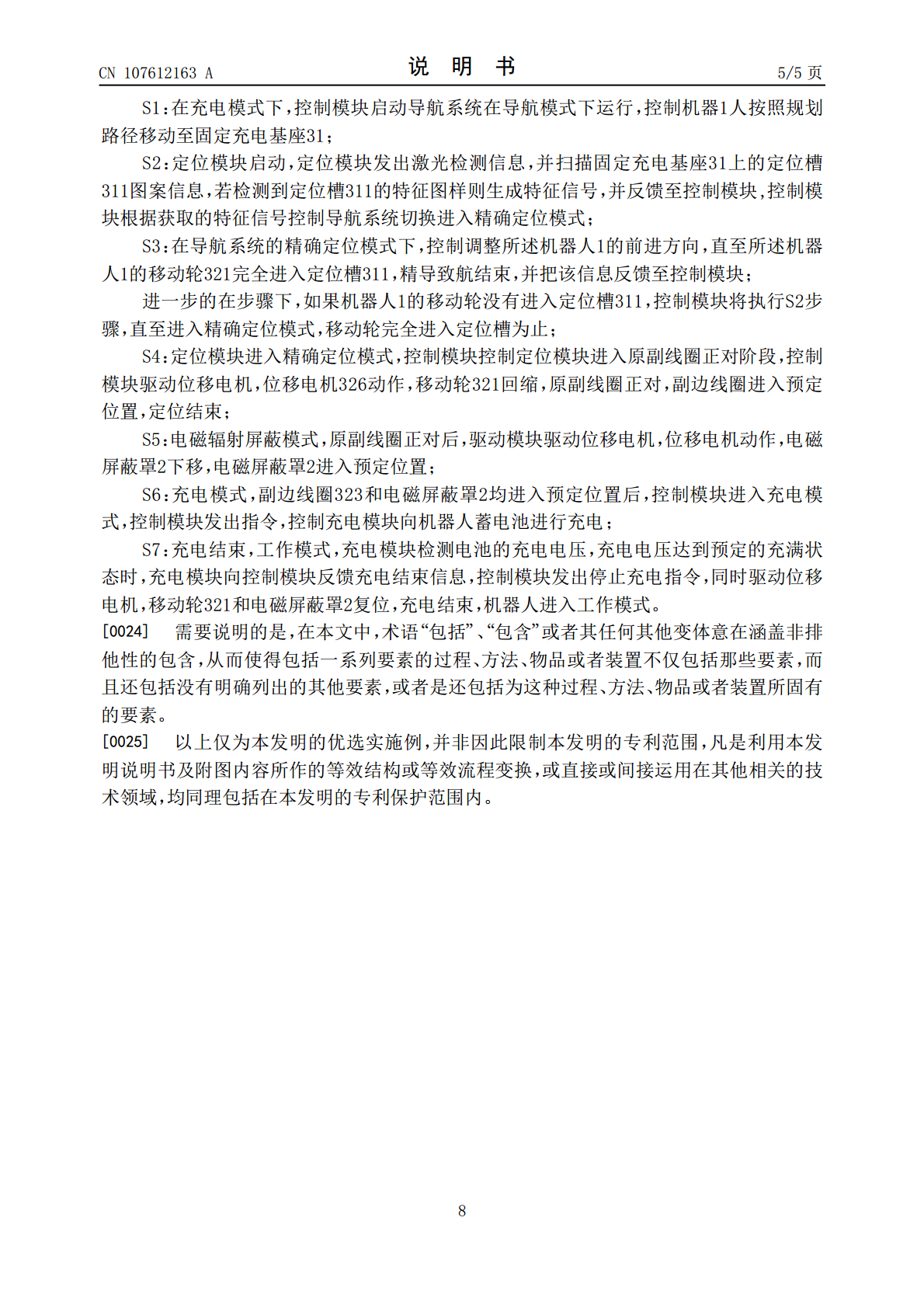
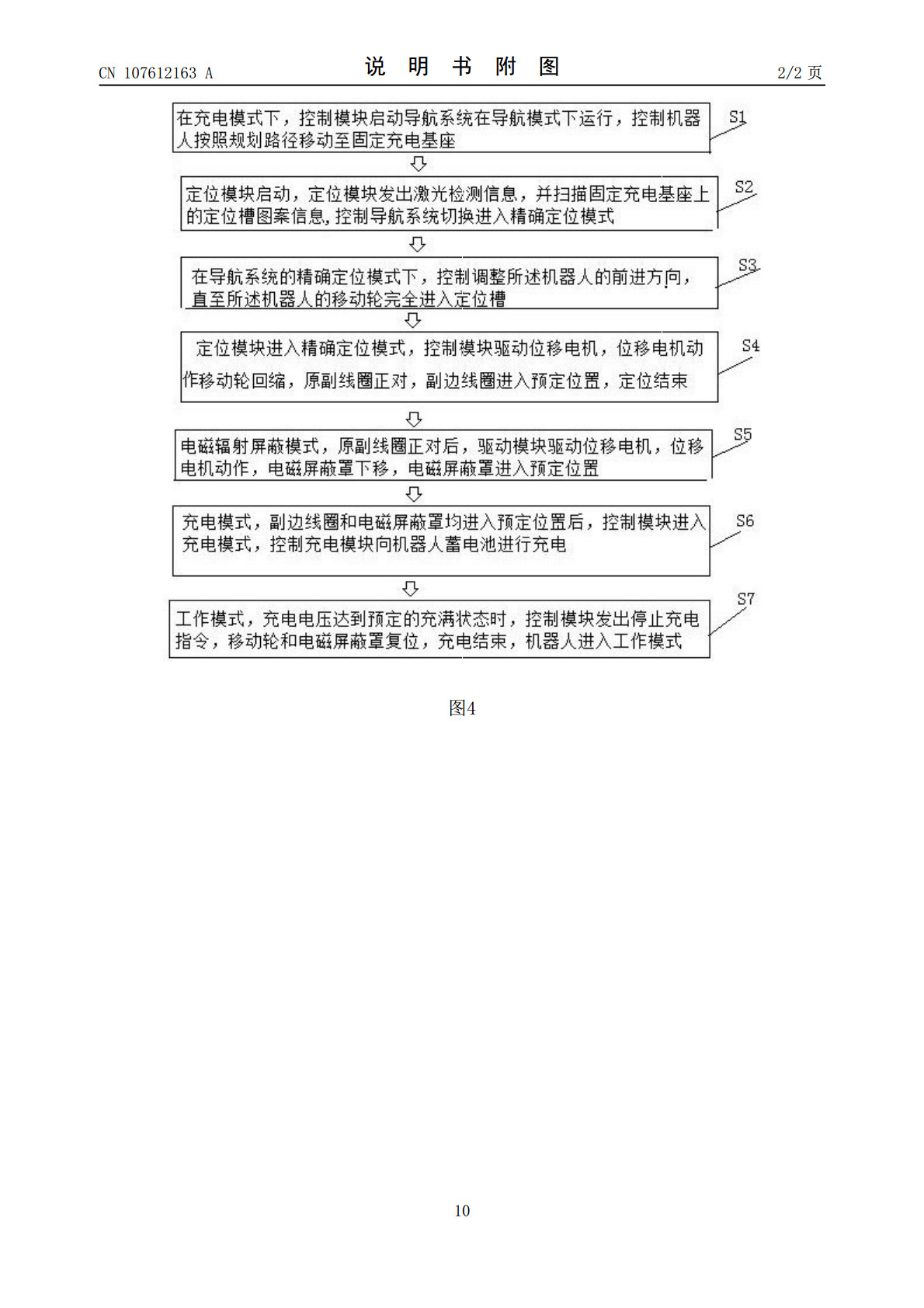
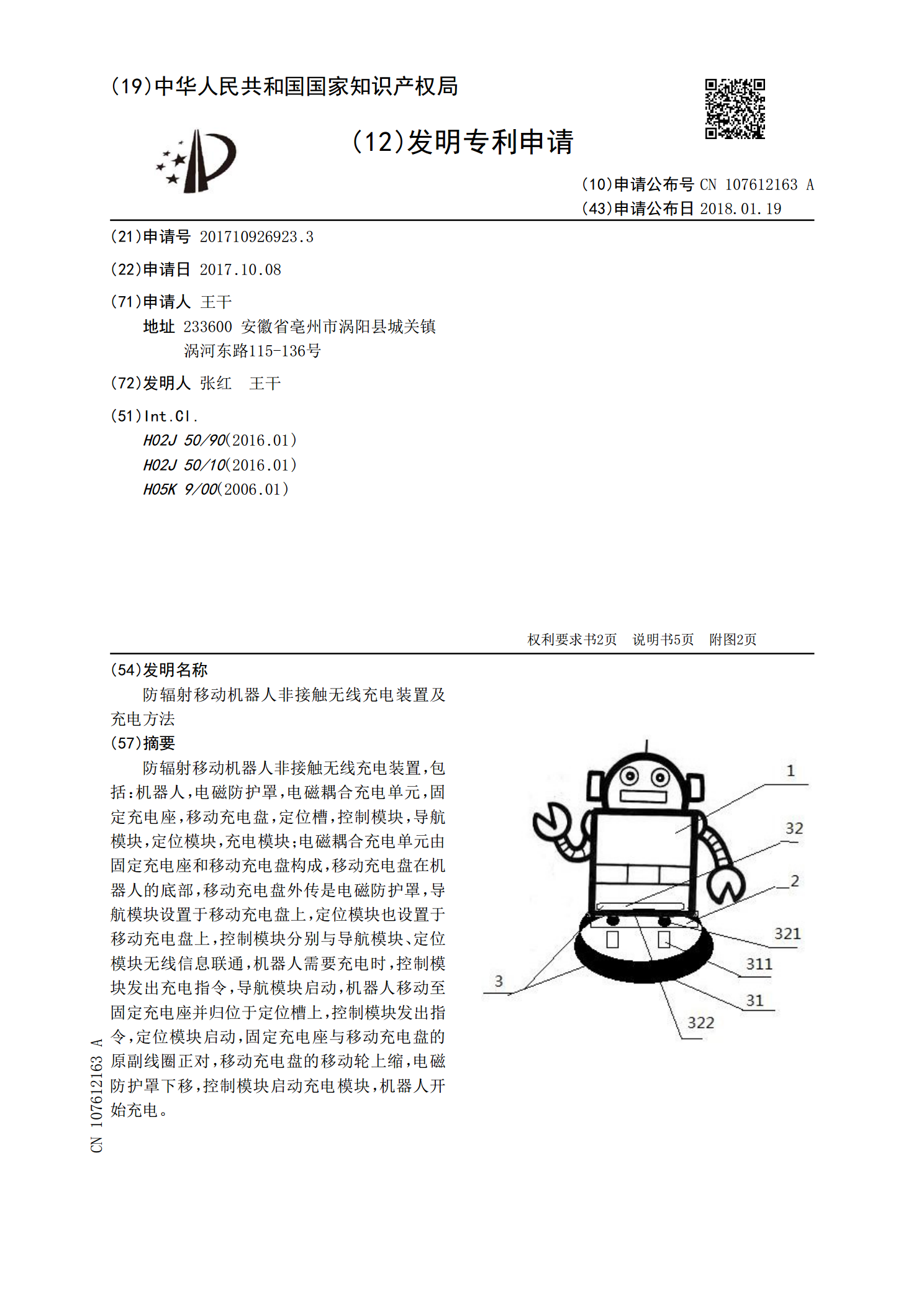
防辐射移动机器人非接触无线充电装置,包括:机器人,电磁防护罩,电磁耦合充电单元,固定充电座,移动充电盘,定位槽,控制模块,导航模块,定位模块,充电模块;电磁耦合充电单元由固定充电座和移动充电盘构成,移动充电盘在机器人的底部,移动充电盘外传是电磁防护罩,导航模块设置于移动充电盘上,定位模块也设置于移动充电盘上,控制模块分别与导航模块、定位模块无线信息联通,机器人需要充电时,控制模块发出充电指令,导航模块启动,机器人移动至固定充电座并归位于定位槽上,控制模块发出指令,定位模块启动,固定充电座与移动充电盘的原副
室内移动机器人非接触自主无线充电装置及方法.pdf
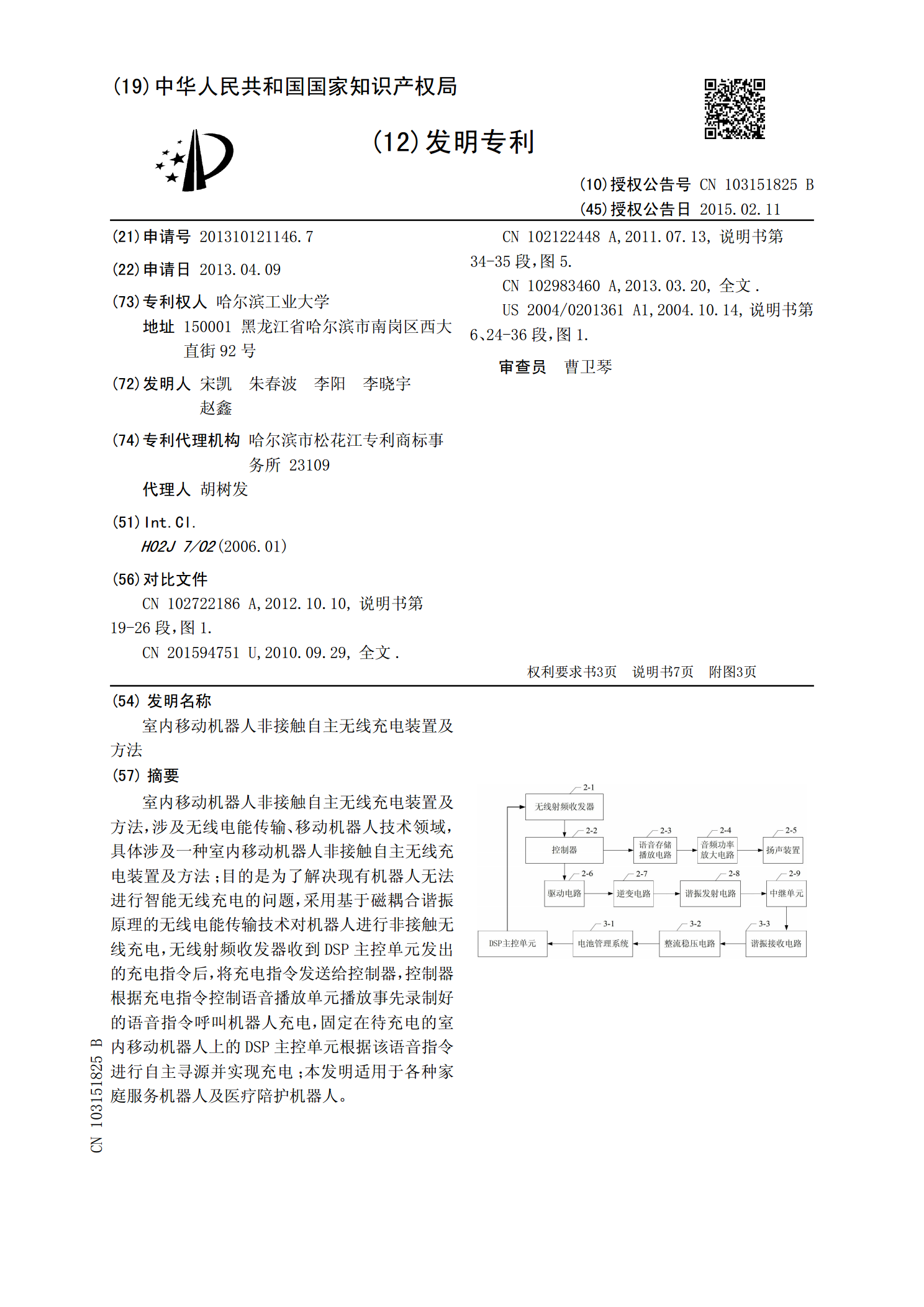
室内移动机器人非接触自主无线充电装置及方法,涉及无线电能传输、移动机器人技术领域,具体涉及一种室内移动机器人非接触自主无线充电装置及方法;目的是为了解决现有机器人无法进行智能无线充电的问题,采用基于磁耦合谐振原理的无线电能传输技术对机器人进行非接触无线充电,无线射频收发器收到DSP主控单元发出的充电指令后,将充电指令发送给控制器,控制器根据充电指令控制语音播放单元播放事先录制好的语音指令呼叫机器人充电,固定在待充电的室内移动机器人上的DSP主控单元根据该语音指令进行自主寻源并实现充电;本发明适用于各种家庭

移动体用非接触充电装置及移动体用非接触充电方法.pdf
提供一种移动体用非接触充电装置及移动体用非接触充电方法,以非接触方式有效地向接收部的设置有制约的移动体传输电力。移动体用非接触充电装置具备:设置在电动汽车(100)中的受电装置(110);和不与受电装置接触的送电装置(210)。受电装置具备分散配置在电动汽车的规定的部位且用于接收来自外部的电力的多个受电线圈(140)。送电装置具备与多个接收线圈相对应地配置在电动汽车的外部的规定位置且用于发送电力的多个送电线圈(240)。以非接触的方式从多个送电线圈向多个受电线圈传输电力,对二次电池(130)进行充电。由于
无线充电装置及无线充电切换方法.pdf
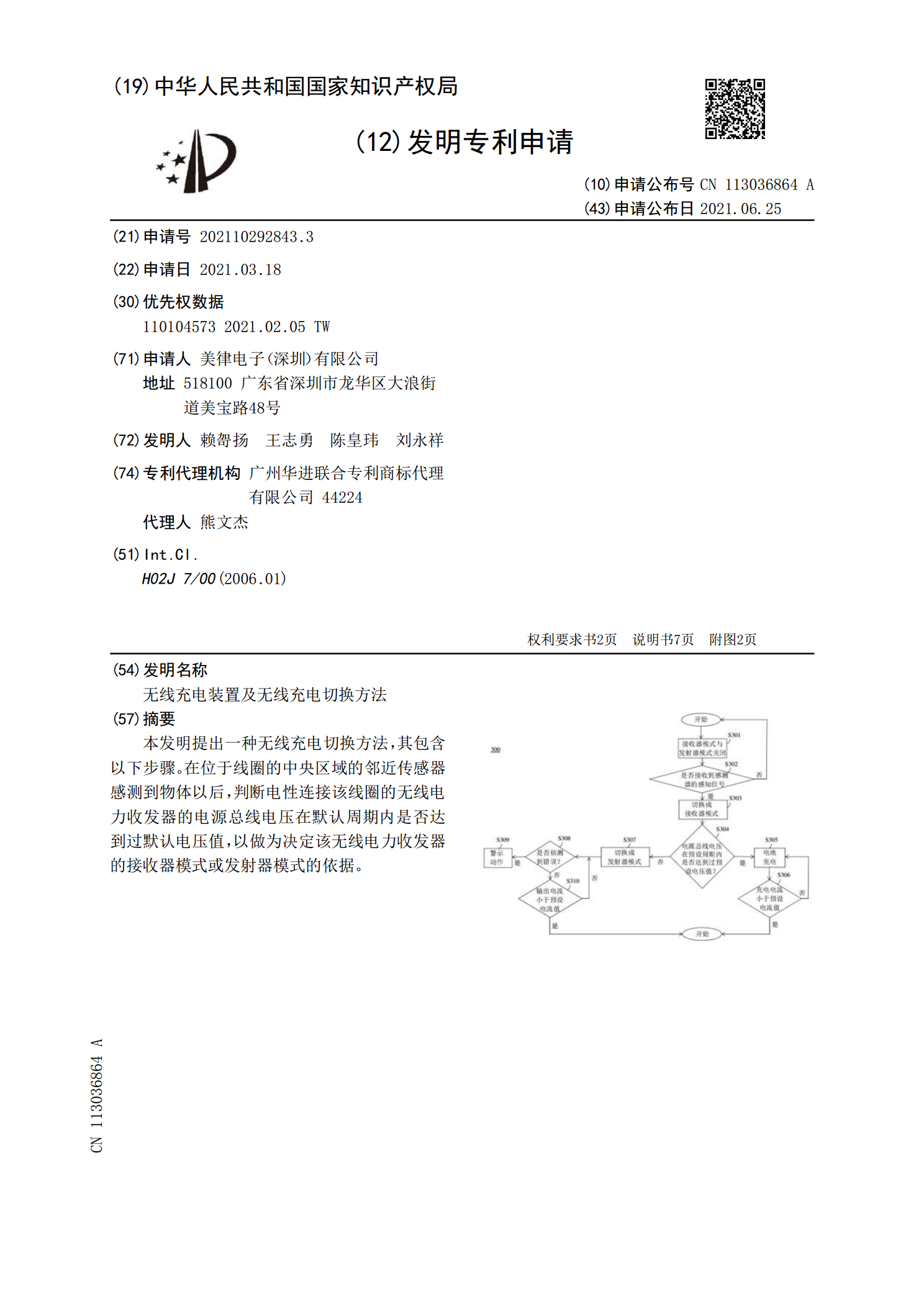
本发明提出一种无线充电切换方法,其包含以下步骤。在位于线圈的中央区域的邻近传感器感测到物体以后,判断电性连接该线圈的无线电力收发器的电源总线电压在默认周期内是否达到过默认电压值,以做为决定该无线电力收发器的接收器模式或发射器模式的依据。

无线充电服务方法及无线充电装置.pdf
本发明关于一种无线充电服务方法及无线充电装置。该无线充电服务方法包括以下步骤:辨识装置进行电子装置的认证工作,于电子装置通过认证工作时,辨识装置传输授权信息至电子装置,以及,无线充电装置接收来自于电子装置的授权信息,且对电子装置进行无线充电。由此,本发明使得电子装置的认证工作仅限于电子装置与辨识装置之间,而不会将电子装置的账号信息以及密码信息传输至公用的无线充电装置中,以避免私人信息外泄。